Момент силы относительно точки. Вращательный эффект силы характеризуется ее эффектом. Моментом силы относительно центра О называется величина, равная взятому с соотв. знаком произведению модуля силы на длину плеча. Момент силы относительно оси. Моментом силы относительно оси называется скалярная величина, равная моменту проэкции этой силы на плоскость, перпендикулярную оси, взятому относительно точки пересечения оси с плоскостью.
Пара сил, момент пары. Свойства пар сил. Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абс. твердое тело. Моментом пары наз. величина, равная взятому с соотв. знаком произведению модуля одной из сил пары на ее плечо (Понятие момента силы связано с точкой, относительно к-рой берется момент. Момент пары определяется только ее моментом и плечом; ни с какой точкой плоскости эта величина не связана). Св-ва : сумма моментов сил пары относительно точки не зависит от выбора точки и всегда равняется моменту пары, Пара сил не имеет равнодействующей - нельзя уравновесить одной силой. Сложение пар сил. Система пар, лежащих в одной плоскости, эквивалентна одной паре, лежащей в той же плоскости и имеющей момент, равный алгебраической сумме моментов слагаемых пар.
Теорема Вариньона. О моменте равнодействующей - момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
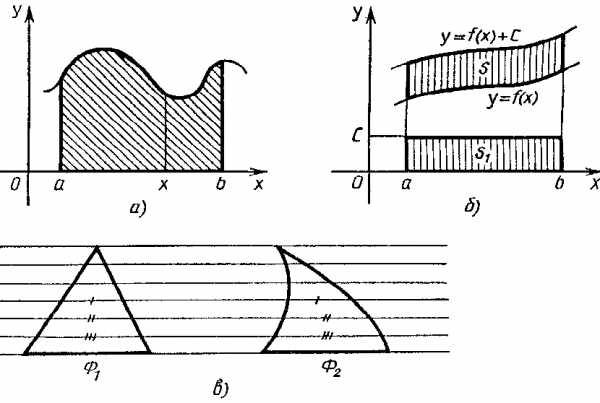
Виды нагрузок. а) Сосредоточенная, б) Рассредоточенная равномерная и неравномерная, в) Пара сил - момент.
Параллельный перенос сил. Приведение системы сил к одному центру. Силу можно переносить в любую точку тела, к-рая называется точкой приведения, если прибавить при этом пару сил (в точку приведения). Главный вектор и главный момент произвольной системы сил. Все силы, которые действуют на тело можно привести к одной точке, при этом вместо сил имеем эквивалентную систему сил, которая состоит из главного вектора и главного момента (пара сил). Частные случаи приведения произвольной системы сил к одному центру - а) главный момент равен равнодействующей, если главный момент М=0, б) Fгол=0, Мгол0, в) Fгол0, Мгол0, Мгол перпендик. Fгол - плоская система сил. г) Мгол0 Fгол0 Мгол || Fгол - силовой винт. е) Fгол=0, Мгол=0 - равновесие тела.
Условия равновесия произвольной пространственной системы сил. S - сумма, Мгол = S Мi(F) = 0; Fгол = S Fi = 0; Написать проекции на все оси. Условия равновесия произвольной плоской системы сил. а)Одной проекции силы нет, зато есть один момент с индексом этой оси б) есть два момента - нет двух сил в) Все моменты равны нулю. Формы условий равновесия. ??????
Центр параллельных сил - это точка приложения равнодействующей системы параллельных сил.
Центр тяжести однородного тела. Центр тяжести плоской фигуры.
Трение скольжения, угол трения. Закон Кулона-Амонтона - F=fN. Угол трения - это угол, тангенс к-рого равен коэффициенту трения - предельный угол силы к нормали пов-ти, чтобы тело поехало.
Кинематика: Теоремы о скоростях. а) Проекции скоростей (абсол. твердого тела) двух точек на прямую, которая проходит через них равны. б) Скорость любой точки складывается из скорости какой-либо другой точки, принятой за полюс, и скорости ее вращения вокруг этой точки. Мгновенный центр скоростей. Связь скоростей точек с мгновенными радиусами при п.п.д. МЦС - это точка в плоскости движения, скорость к-рой в данный момент времени равна нулю. Способы определения мгновенного центра скоростей. Всего - четыре.
Динамика точки и системы: Основное уравнение динамики для свободной и несвободной материальной точки в векторной, координатной и естественной формах. Для несвободной точки – к силе прибавляется вектор N – реакция опоры.
Теорема – о независимом действии сил – если на точку действует несколько сил или равнодействующая то точка будет двигаться с ускорением = сумме ускорений, к-рые возникают при действии каждой силы отдельно.
Вывести и сформулировать принцип Даламбера для точки. ma = F + N; F + N + (-ma) = 0; Ф = -ma; - сила инерции. Решение второй задачи динамики точки. Это - зная силы найти закон движения. а) Показываем начальное и конечное положение тела. б) Направляем ось х из начального в конечное положение, ось у – перпендикулярно х с начального положения, в) Показываем тело в свободном положении и действующие на него силы, г) составляем дифур движения точки в проекции на ось х, д) интегрируем это уравнение, е) находим постоянные интегрирования с начальных условий и неизвестные величины. That all.
Две основные меры механического движения точки. Импульс (кол-во движения) и кинетическая энергия. Работа упругой силы. - Частный случай
Работа силы, когда тело вращается.
Теорема об изменении кинетической энергии точки. Изменение кинетической энергии точки при некотором ее перемещении равно сумме работ внешних сил, которые действуют на этом перемещении на точку. Диф. уравнение движения мех системы и св-во внутренних сил.
Теорема об изменении кинетической энергии системы. Идеальные связи – сумма возможных работ реакций которых равна нулю. Возможные перемещения, возможная работа силы. Возможное перемещение – это бесконечно малые перемещения точек мех. системы, которые мы представляем и которые разрешены связями. Возможные работы находятся по таким же правилам как и действительные, но вместо дифференциалов записываются их вариации. Принцип Лагранжа-Даламбера (Общее уравнение динамики) Необходимыми и достаточными условиями действительного движения мех. системы на к-рую действуют голономные двусторонние стационарные и идеальные связи есть равенство нулю суммы возможных работ всех активных сил и сил инерции на любых возможных перемещениях системы. Связи, классификация связей. а) геометрические (без производных), б) кинематические (дифференциальные r?’=V), в) интегрируемые (это кинемат. К-рые можно привести к геометрич. r?=s), г) односторонние, д) двухсторонние, е) нестационарные –f(t).
Принцип возможных перемещений. Необходимыми и достаточными условиями для равновесия мех. системы, к которой приложены двусторонние, стационарные и идеальные связи, есть равенство нулю суммы возможных работ всех активных сил на любых возможных перемещениях из положения равновесия. Обобщенные координаты, скорости, силы. Называются независимые параметры, которые однозначно определяют положение мех. системы (эти параметры – любой размерности). Обобщенная сила – это коэффициент при вариации обобщенной координаты в выражении возможной работы.
Обобщенная сила инерции.
Уравнение Лагранжа второго рода.
www.ronl.ru
|
Библиотека 5баллов.ru Соглашение об использовании Материалы данного файла могут быть использованы без ограничений для написания собственных работ с целью последующей сдачи в учебных заведениях. Во всех остальных случаях полное или частичное воспроизведение, размножение или распространение материалов данного файла допускается только с письменного разрешения администрации проекта www.5ballov.ru . Ó РосБизнесКонсалтинг |
Статика :
Уравновешенные силы:
Система сил, под действием которой свободное твердое тело может находится в покое, называется уравновешенной.
Аксиомы статики:
а) Аксиома о уравновешенных силах (о абсолютном твердом теле) - две одинаковые силы, приложенные к абс. твердому телу и действуют вдоль одной прямой в противоположных направлениях назыв. уравновешенными силами. б) Аксиома о прибавлении или вычитании уравновешенной системы сил - действие системы сил на твердое тело не меняется, если если прибавить к ней уравновешенные силы. в) Аксиома сложения сил - силы, которые действуют на точку, можно складывать как векторы или аналитично. г) Аксиома о опорах (связи) и их реакции - силы могут быть активными и пассивными. Первые стремятся вызвать ускорение матер. точек. Другие - ограничивают движение. Они возникают как реакции системы на движение или на действие активных сил. Движение матер. точек может быть свободным или ограниченным. Во втором случае тело или точка назыв. несвободной. Все, что ограничивает движение тел в пространстве называется опорой (связью). д) Аксиома о освобождении от связи (опоры) - механическое состояние системы материальных точек не изменится, если освободить ее от связей, меняя их силами, действие которых такое же, как и связей (опор). Эти силы назыв. реакциями связей - пассивные силы, которые направлены в противоположную сторону относительно ограничения движения.
Момент силы относительно точки.
Вращательный эффект силы характеризуется ее эффектом. Моментом силы относительно центра О называется величина, равная взятому с соотв. знаком произведению модуля силы на длину плеча.
Момент силы относительно оси.
Моментом силы относительно оси называется скалярная величина, равная моменту проэкции этой силы на плоскость, перпендикулярную оси, взятому относительно точки пересечения оси с плоскостью.
Пара сил, момент пары. Свойства пар сил.
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абс. твердое тело. Моментом пары наз. величина, равная взятому с соотв. знаком произведению модуля одной из сил пары на ее плечо (Понятие момента силы связано с точкой, относительно к-рой берется момент. Момент пары определяется только ее моментом и плечом; ни с какой точкой плоскости эта величина не связана). Св-ва : сумма моментов сил пары относительно точки не зависит от выбора точки и всегда равняется моменту пары, Пара сил не имеет равнодействующей - нельзя уравновесить одной силой.
Сложение пар сил.
Система пар, лежащих в одной плоскости, эквивалентна одной паре, лежащей в той же плоскости и имеющей момент, равный алгебраической сумме моментов слагаемых пар.
Теорема Вариньона.
О моменте равнодействующей - момент равнодействующей плоской системы сходящихся сил относительно любого центра равен алгебраической сумме моментов слагаемых сил относительно того же центра.
Виды нагрузок.
а) Сосредоточенная, б) Рассредоточенная равномерная и неравномерная, в) Пара сил - момент.
Параллельный перенос сил. Приведение системы сил к одному центру.
Силу можно переносить в любую точку тела, к-рая называется точкой приведения, если прибавить при этом пару сил (в точку приведения).
Главный вектор и главный момент произвольной системы сил.
Все силы, которые действуют на тело можно привести к одной точке, при этом вместо сил имеем эквивалентную систему сил, которая состоит из главного вектора и главного момента (пара сил). Частные случаи приведения произвольной системы сил к одному центру - а) главный момент равен равнодействующей, если главный момент М=0, б) F гол =0, М гол <>0, в) F гол <>0, М гол <>0, М гол перпендик. F гол - плоская система сил. г) М гол <>0 F гол <>0 М гол || F гол - силовой винт. е) F гол =0, М гол =0 - равновесие тела.
Условия равновесия произвольной пространственной системы сил.
S - сумма, Мгол = S Мi(F) = 0; Fгол = S Fi = 0;
Написать проекции на все оси.
Условия равновесия произвольной плоской системы сил.
а)Одной проекции силы нет, зато есть один момент с индексом этой оси б) есть два момента - нет двух сил в) Все моменты равны нулю.
Формы условий равновесия. ??????
Центр параллельных сил - это точка приложения равнодействующей системы параллельных сил.
Центр тяжести однородного тела.
Центр тяжести плоской фигуры.
Трение скольжения, угол трения.
Закон Кулона-Амонтона - F=fN. Угол трения - это угол, тангенс к-рого равен коэффициенту трения - предельный угол силы к нормали пов-ти, чтобы тело поехало.
Кинематика :
Теоремы о скоростях.
а) Проекции скоростей (абсол. твердого тела) двух точек на прямую, которая проходит через них равны. б) Скорость любой точки складывается из скорости какой-либо другой точки, принятой за полюс, и скорости ее вращения вокруг этой точки.
Мгновенный центр скоростей. Связь скоростей точек с мгновенными радиусами при п.п.д.
МЦС - это точка в плоскости движения, скорость к-рой в данный момент времени равна нулю.
Способы определения мгновенного центра скоростей.
Всего - четыре.
Динамика точки и системы:
Основное уравнение динамики для свободной и несвободной материальной точки в векторной, координатной и естественной формах.
Для несвободной точки – к силе прибавляется вектор N – реакция опоры.
Теорема – о независимом действии сил – если на точку действует несколько сил или равнодействующая то точка будет двигаться с ускорением = сумме ускорений, к-рые возникают при действии каждой силы отдельно.
Вывести и сформулировать принцип Даламбера для точки.
ma = F + N; F + N + (-ma) = 0; Ф = -ma; - сила инерции.
Решение второй задачи динамики точки.
Это - зная силы найти закон движения. а) Показываем начальное и конечное положение тела. б) Направляем ось х из начального в конечное положение, ось у – перпендикулярно х с начального положения, в) Показываем тело в свободном положении и действующие на него силы, г) составляем дифур движения точки в проекции на ось х, д) интегрируем это уравнение, е) находим постоянные интегрирования с начальных условий и неизвестные величины. That all.
Две основные меры механического движения точки.
Импульс (кол-во движения) и кинетическая энергия.
Работа упругой силы . - Частный случай
Работа силы, когда тело вращается.
Теорема об изменении кинетической энергии точки.
Изменение кинетической энергии точки при некотором ее перемещении равно сумме работ внешних сил, которые действуют на этом перемещении на точку.
Диф. уравнение движения мех системы и св-во внутренних сил.
Теорема об изменении кинетической энергии системы.
Идеальные связи – сумма возможных работ реакций которых равна нулю.
Возможные перемещения, возможная работа силы.
Возможное перемещение – это бесконечно малые перемещения точек мех. системы, которые мы представляем и которые разрешены связями. Возможные работы находятся по таким же правилам как и действительные, но вместо дифференциалов записываются их вариации.
Принцип Лагранжа-Даламбера (Общее уравнение динамики)
Необходимыми и достаточными условиями действительного движения мех. системы на к-рую действуют голономные двусторонние стационарные и идеальные связи есть равенство нулю суммы возможных работ всех активных сил и сил инерции на любых возможных перемещениях системы.
Связи, классификация связей.
а) геометрические (без производных), б) кинематические (дифференциальные r j ’=V), в) интегрируемые (это кинемат. К-рые можно привести к геометрич. r j =s), г) односторонние, д) двухсторонние, е) нестационарные –f(t).
Принцип возможных перемещений.
Необходимыми и достаточными условиями для равновесия мех. системы, к которой приложены двусторонние, стационарные и идеальные связи, есть равенство нулю суммы возможных работ всех активных сил на любых возможных перемещениях из положения равновесия.
Обобщенные координаты, скорости, силы.
Называются независимые параметры, которые однозначно определяют положение мех. системы (эти параметры – любой размерности).
Обобщенная сила – это коэффициент при вариации обобщенной координаты в выражении возможной работы.
Обобщенная сила инерции.
Уравнение Лагранжа второго рода.
ref.repetiruem.ru
- -
Содержание:
1.Введение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Основные понятия статики. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3. Аксиомы статики. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .7
4. Связи и их реакции. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . .10
5. Заключение. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
6. Список литературы. . . . . . . . . . . . . . . . . . . . . . ... . . . . . . . . . . . . . . . . . . . . . . . .16 Введение.
СТАТИКА это раздел механики, посвящённый изучению условий равновесия материальных тел под действием cил. Статику разделяют на геометрическую и аналитическую. В основе аналитической статики лежит возможных перемещений принцип, дающий условия равновесия любой механической системы. Геометрическая статика основывается на так называемых аксиомах статики, являющихся следствиями основных законов механики и выражающих свойства сил, действующих на материальную точку и абсолютно твердое тело, то есть тело, расстояния между точками которого всегда остаются неизменными. Методами геометрической статики изучается равновесие твердого тела; при этом рассматриваются решения следующих двух типов задач:
1) приведение систем сил, действующих на твердое тело, к простейшему виду;
2) определение условий равновесия сил, действующих на твердое тело.
Необходимые и достаточные условия равновесия упруго деформируемых тел, а также жидкостей и газов рассматриваются соответственно в упругости теории, гидростатике и аэростатике [1].
К основным понятиям статики относится понятие о силе, о моменте силы относительно центра и относительно оси и о паре сил. Сложение сил и их моментов относительно центра производится по правилу сложения векторов. Отсюда следует, что любую систему действующих на твердое тело сил можно задать её главным вектором.
Неравновесная статика точки даёт статистическое обоснование термодинамики неравновесных процессов (уравнений переноса энергии, импульса, массы) и позволяет получить выражения для входящих в уравнения переноса коэффициент (кинетический коэффициент) на основе законов взаимодействия и движения частиц системы [2].
Основные понятия статики.
Статикой называется раздел механики, в котором излагается общее учение о силах и изучается условия равновесия материальных тел, находящихся под действием сил.
Твердое тело. В статике и вообще в теоретической механике все тела считаются абсолютно твердыми. То есть предполагается, что эти тела не деформируются, не изменяют свою форму и объем, какое бы действие на них не было оказано.
Исследованием движения нетвердых тел – упругих, пластичных, жидких, газообразных, занимаются другие науки (сопротивление материалов, теория упругости, гидродинамика и т.д.).
Под равновесием будем понимать состояния покоя тела по отношению к другим материальным телам.
Основные понятия:
1. Величина, являющаяся количественной мерой механического взаимодействия материальных тел, называется в механике силой.
Сила является величиной векторной.
Ее действие на тело определяется: 1) численной величиной или модулем силы, 2) направлением силы, 3) точкой приложения силы (рис.1).
Рис.1. Абсолютно твердое тело с приложенной к нему силой F.
Прямая DB, вдоль которой направлена сила, называется линией действия силы.
В тексте вектор силы обозначается латинскими буквами , , и др., с черточками над ними. Если черточки нет, значит у силы известна только ее численная величина – модуль.
Предполагается, что действие силы на тело не изменится, если ее перенести по линии действия в любую точку тела (конечно – твердого тела). Поэтому вектор силы называют скользящим вектором. Если силу перенести в точку, не расположенную на этой линии, действие ее на тело будет совсем другим.
1. Совокупность сил, действующих на какое-нибудь твердое тело, будем называть системой сил.
2. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.
3. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
4. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю.
5. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Таким образом, равнодействующая - это сила, которая одна заменяет действие данной системы сил на твердое тело.
6. Сила, равная равнодействующей по модулю, прямо противоположная ей по направлению и действующая вдоль той же прямой, называется уравновешивающей силой.
7. Силы, действующие на твердое тело, можно разделить на внешние и внутренние. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга.
8. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными.
Понятие о сосредоточенной силе является условным, так как практически приложить силу к телу в одной точке нельзя. Силы, которые мы в механике рассматриваем как сосредоточенные, представляют собою по существу равнодействующие некоторых систем распределенных сил.
В частности, обычно рассматриваемая в механике сила тяжести, действующая на данное твердое тело, представляет собою равнодействующую сил тяжести его частиц. Линия действия этой равнодействующей проходит через точку, называемую центром тяжести тела.
Изучение этих вопросов необходимо в дальнейшем для изучения центра тяжести, произвольной пространственной системы сил, сил трения скольжения, моментов трения качения, решения задач в дисциплине «Сопротивление материалов».
Аксиомы статики.
Все теоремы и уравнения статики выводятся из нескольких исходных положений, принимаемых без математических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F1 = F2) и направлены вдоль одной прямой в противоположные стороны (рис. 2).
Рис.2. Абсолютно твердое тело с приложенными к нему силами F1 и F2.
Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равновесии не может.
Аксиома 2. Действие данной системы, сил на абсолютно твердое тело не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Эта аксиома устанавливает, что две системы сил, отличающиеся на уравновешенную систему, эквивалентны друг другу.
Следствие из 1-й и 2-й аксиом. Действие силы на абсолютно твердое тело не изменится, если перенести точку приложения силы вдоль ее линии действия в любую другую точку тела.
Рис.3. Система трех приложенных к телу сил.
В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис.3). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы и , такие, что = , = . От этого действие силы на тело не изменится. Но силы и согласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В результате на тело. Будет действовать только одна сила , равная , но приложенная в точке В.
Таким образом, вектор, изображающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах.
Вектор , равный диагонали параллелограмма, построенного на векторах и (рис.4), называется геометрической суммой векторов и : = + .
Рис.4.Правило параллелограмма в графическом виде.
Величина равнодействующей
Конечно, Такое равенство будет соблюдаться только при условии, что эти силы направлены по одной прямой в одну сторону. Если же векторы сил окажутся перпендикулярными, то
Следовательно, аксиому 3 можно еще формулировать так: две силы, приложенные к телу в одной точке, имеют равнодействующую, равную геометрической (векторной) сумме этих сил и приложенную в той же точке.
Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но противоположное по направлению противодействие.
Закон о равенстве действия и противодействия является одним из основных законов механики. Из него следует, что если тело А действует на тело В с силой , то одновременно тело В действует на тело А с такой же по модулю и направленной вдоль той же прямой, но противоположную сторону силой = (рис. 5). Однако силы и не образуют уравновешенной системы сил, так как они приложены к разным телам.
Рис.5. Закон о равенстве действия и противодействия.
Аксиома 5 (принцип отвердевания). Равновесие изменяемого (деформируемого) тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сваренными друг с другом и т. д
Связи и их реакции.
По определению, тело, которое не скреплено с другими телами и может совершать из данного положения любые перемещения в пространстве, называется свободным (например, воздушный шар в воздухе). Тело, перемещениям которого в пространстве препятствуют какие-нибудь другие, скрепленные или соприкасающиеся с ним тела, называется несвободным. Все то, что ограничивает перемещения данного тела в пространстве, будем называть связью.
Например, тело лежащее на столе – несвободное тело. Связью его является плоскость стола, которая препятствует перемещению тела вниз.
Очень важен так называемый принцип освобождаемости, которым будем пользоваться в дальнейшем. Записывается он так.
Любое несвободное тело можно сделать свободным, если связи убрать, а действие их на тело заменить силами, такими, чтобы тело оставалось в равновесии.
Сила, с которой данная связь действует на тело, препятствуя тем ила иным его перемещениям, называется силой реакции (противодействия) связи или просто реакцией связи.
Так у тела, лежащего на столе, связь – стол. Тело несвободное. Сделаем его свободным – стол уберем, а чтобы тело осталось в равновесии, заменим стол силой, направленной вверх и равной, конечно, весу тела.
Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Когда связь одновременно препятствует перемещениям тела по нескольким направлениям, направление реакции связи также наперед неизвестно и должно определяться в результате решения рассматриваемой задачи.
Рассмотрим, как направлены реакции некоторых основных видов связей.
1. Гладкая плоскость (поверхность) или опора. Гладкой будем называть поверхность, трением о которую данного тела можно в первом приближении пренебречь. Такая поверхность не дает телу перемещаться только по направлению общего перпендикуляра (нормали) к поверхностям соприкасающихся тел в точке их касания. Поэтому реакция N гладкой поверхности или опоры направлена по общей нормали к поверхностям соприкасающихся тел в точке их касания и приложена в этой точке. Когда одна из соприкасающихся поверхностей является точкой, то реакция направлена по нормали к другой поверхности.
Если поверхности не гладкие, надо добавить еще одну силу – силу трения , которая направлена перпендикулярно нормальной реакции в сторону, противоположную возможному скольжению тела.
Рис.6.Связь в виде гибкой нерастяжимой нити.
freepapers.ru
Министерство образования и науки Российской Федерации
Кафедра «Теоретическая механика и сопротивление материалов»
Расчетная работа по теоретической механике №1
По теме: «Статика. Кинематика точки»
Вариант 15
Выполнил:
Проверил:
2011
С-1 Вариант 15.
Дано: Р=10 кН
М=5 кН*м
q=2кН/м
Найти: Хa, Ya, Yb.
Решение.
1. Разложим силы.
Px=P*cos45
Py=P*cos45
Q1=q*2
Q2=q*4
2. Покажем реакции в опорах.
ХA, УA, УB.
3. Составим уравнения равновесия.
1) ∑x=0; Xa+Q1+Px=0.
2) ∑y=0; Ya-Py-Q2+Yb=0.
3) ∑Ma(Fk)=0; -Q1*1-Q2*2+Yb*4-Px*2-M=0.
4. Расчет
Из 1) Xa= -Q1-P*cos45= -4-10*0,707= -11,07
Из 3) Yb= (Q1+Q2*2+2*P*cos45+M)/4 = (4+8*2+2*10+0,707+5)/4=9,78
Из 2) Ya= P*cos45+Q2-Yb= 10*0,707+8-9,78=5,29
5.Проверка
∑Md(Fk)=0; -Ya*4+Xa*2+Q1*1+P*cos45*4+Q2*2-M=0.
-5,29*4+(-11,07*2)+4+7,07*4+16-5=-21,15-22,13+4+28,28+16-5=0.
0=0.
Ответ: Xa=-11,07. Ya=5,29. Yb=9,78.
C-3. Вариант 15.
Дано: Р1=5 кН
P2=8 кН
М=22 кН*м
q=3,6 кН/м
Найти: Mb.
Решение.
1. Укажем систему отсчета из точки А, (х, у).
2. Разобьем схему на 2 части.
3. Разложим силы и покажем реакции в опорах.
P2x=P2*cos45
P2y=P2*cos45
Q=q*2
Rax=Ra*cos30
Ray=Ra*cos60
Mb – реактивный момент.
Xc=X1 c; Yc=Y1 c
4. Составим уравнения равновесия по частям.
I
1) ∑x=0; Rax+Xc=0.
2) ∑y=0; Ray-Q+Yc=0.
3) ∑Ma(Fk)=0; M-2*Q+3*Yc=0.
II
4) ∑x=0; -X1 c-P2x+Xb=0.
5) ∑y=0; -Y1 c-P1+Yb-P2y=0.
6) ∑Mc(Fk)=0; -P1*2-P2y*4-P2x*3+Yb*4+Mb=0.
5. Расчет
Из 3) Yc= (2*Q-M)/3= (14,4-22)/3= -2,53
Из 2) Ra=(Q-Yc)/cos60=(7,2-(-2,53))/0,5=19,46
Из 1) Xc= -Ra*cos30=-16,85
Из 4) Xb=X1 c+P2x=-16,85+5,656=-11,19
Из 5) Yb=Y1 c+P1+P2y=-2,53+5+5,656=8,126
Из 6) Mb=P1*2+P2y*4+P2x*3-Yb*4=10+22,62+16,968-32,504=17,084.
5.Проверка по I части.
∑Mc(Fk)=0; -Ray*3+q+m=0.
--29.2+7,2+22=0.
0=0.
Ответ: Mb=17,084.
С-7. Вариант 15.
Дано: Q=3 кН
G=2 кН
R=0,20 м
а=0,6 м
b=0,2 м
c=0,4 м
r=0,05 м
Найти: Za, Xa,
Zb,Xb,P.
Решение.
1. Разложим силы.
Qx=Q*cos60
Qz=Q*cos30
Px=P*cos30
Pz=P*cos60
2. Покажем реакции в опорах.
Za, Xa, Zb, Xb.
3. Составим уравнения равновесия.
1) ∑xк =0; Xa+Xb-Qx+Px=0.
2) ∑zк =0; Za+Zb+Qz-G-Pz=0.
3) ∑Mx(Fk)=0; Qz*(a+b)+Zb*(a+3b)-G*(a+3b+c)-Pz*(a+3b+c)=0.
4) ∑My(Fk)=0; -Qz*r+P*R=0.
5) ∑Mz(Fk)=0; Qx*(a+b)-Xb*(a+3b)-Px*(a+3b+c)=0.
4. Расчет.
Из 4) P=(Qz*r)/R=(3*0,866*0,05)/0,2=0,65
Из 3) Zb=(-Qz*(a+b)+G*(a+3b+c)+Pz*(a+3b+c))/(a+3b)=1,6415/1,2=1,386
Из 5) Xb=(Qx*(a+b)-Px*(a+3b+c))/(a+3b)=(1,2-0,9)/1,2=0,25
Из 1) Xa= -Xb+Qx-Px=-0,25+3*0,5+0,65*0,866=1,8129
Из 2) Za= -Zb-Qz+G+Pz=-1,378-2,598+2+0,65*0,5=-1,641
5.Проверка
∑Mx1 (Fk)=0; -Za*0,8+Zb*0,4-G*0,8-Pz*0,8=0.
-1,3128+0,5472-1,6-0,26=0.
0=0.
Ответ: P=0,65 кН, Zb=1,368 кН, Xb=0,25 кН, Xa=1,8129 кН, Za= -1,641 кН.
К-1. Вариант 15.
Дано: x=4cos(πt/3)
y=-3sin(πt/3)
t1 = 1 c.
Задание: по заданным уравнениям движения точки М установить вид ее траектории и для момента времени t1 найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории.
Решение.
1. Траектория движения точки y=f(x).
sin(πt/3)=-y/3 + cos(πt/3)=x/4
получаем
1=x2 /16+y2 /9 траектория движения точки – эллипс.
2. Найдем точку М в момент времени t1 = 1 c.
М: x1 =4cos(π/3)=2
y1 =-3sin(π/3)=-2,6
3. Найдем скорость точки в момент времени t1 :
Vx= х = (4cos(πt/3)) = 4π/3*(-sin(πt/3))
Vy= у = (-3sin(πt/3)) = -π*cos(πt/3)
Vx1 =(-4*3,14)/3*0.866=-3,622
Vy1 = -3,14*0,50=-1,57
Определим модуль скорости:
V= V2 x +V2 y= 13,12+2,46= 3,94 см/с
4. Найдем ускорение точки в момент времени t1 :
ax= x = (-4π/3*sin(πt/3)) =-4π2 /9*cos(πt/3)
ay= y = (-π*cos(πt/3)) =π2 /3*sin(πt/3)
ax1 =-2,191
ay1 =2,846
Определим полное ускорение:
a= ax2 +ay2 = 12,9 = 3,6 см/с2
Найдем касательное ускорение точки:
aT = | (Vx*ax+Vy*ay)/V |= | (7,93-4,468)/3,94|=0,88 см/с2
Найдем нормальное ускорение точки:
an = | Vx*ay-Vy*ax| / V= |-10,3 -3,43|/3,94=3,48 см/с2
5. Найдем радиус кривизны траектории
p=V2 /an =15,52/3,48=4,46 см
Результат вычислений для заданного момента времени t1 .
Координаты точки, см | Скорость, см/с | Ускорение см/с2 | Радиус кривизны траектории, см | |||||||
x | y | Vx | Vy | V | ax | ay | a | aT | an | P |
2 | -2,6 | -3,622 | -1,57 | 3,94 | -2,191 | 2,846 | 3,6 | 0,88 | 3,48 | 4,46 |
www.ronl.ru
Министерство образования и науки Российской Федерации
Кафедра «Теоретическая механика и сопротивление материалов»Расчетная работа по теоретической механике №1
По теме: «Статика. Кинематика точки»
Вариант 15Выполнил:Проверил:2011С-1 Вариант 15.Дано: Р=10 кН
М=5 кН*м
q=2кН/м
Найти: Хa, Ya, Yb.
Решение.
1. Разложим силы.
Px=P*cos45
Py=P*cos45
Q1=q*2
Q2=q*42. Покажем реакции в опорах.
ХA, УA, УB.3. Составим уравнения равновесия.1) ∑x=0; Xa+Q1+Px=0.
2) ∑y=0; Ya-Py-Q2+Yb=0.
3) ∑Ma(Fk)=0; -Q1*1-Q2*2+Yb*4-Px*2-M=0.
4. Расчет
Из 1) Xa= -Q1-P*cos45= -4-10*0,707= -11,07
Из 3) Yb= (Q1+Q2*2+2*P*cos45+M)/4 = (4+8*2+2*10+0,707+5)/4=9,78
Из 2) Ya= P*cos45+Q2-Yb= 10*0,707+8-9,78=5,295.Проверка
∑Md(Fk)=0; -Ya*4+Xa*2+Q1*1+P*cos45*4+Q2*2-M=0.
-5,29*4+(-11,07*2)+4+7,07*4+16-5=-21,15-22,13+4+28,28+16-5=0.
0=0.Ответ: Xa=-11,07. Ya=5,29. Yb=9,78. C-3. Вариант 15.Дано: Р1=5 кН
P2=8 кН
М=22 кН*м
q=3,6 кН/м
Найти: Mb.
Решение.
1. Укажем систему отсчета из точки А, (х,у).
2. Разобьем схему на 2 части.
3. Разложим силы и покажем реакции в опорах.
P2x=P2*cos45
P2y=P2*cos45
Q=q*2
Rax=Ra*cos30
Ray=Ra*cos60
Mb – реактивный момент.
Xc=X1c; Yc=Y1c
4. Составим уравнения равновесия по частям.
I
1) ∑x=0; Rax+Xc=0.
2) ∑y=0; Ray-Q+Yc=0.
3) ∑Ma(Fk)=0; M-2*Q+3*Yc=0.
II
4) ∑x=0; -X1c-P2x+Xb=0.
5) ∑y=0; -Y1c-P1+Yb-P2y=0.
6) ∑Mc(Fk)=0; -P1*2-P2y*4-P2x*3+Yb*4+Mb=0.5. РасчетИз 3) Yc= (2*Q-M)/3= (14,4-22)/3= -2,53
Из 2) Ra=(Q-Yc)/cos60=(7,2-(-2,53))/0,5=19,46
Из 1) Xc= -Ra*cos30=-16,85
Из 4) Xb=X1c+P2x=-16,85+5,656=-11,19
Из 5) Yb=Y1c+P1+P2y=-2,53+5+5,656=8,126
Из 6) Mb=P1*2+P2y*4+P2x*3-Yb*4=10+22,62+16,968-32,504=17,084.
5.Проверка по I части.∑Mc(Fk)=0; -Ray*3+q+m=0.
--29.2+7,2+22=0.
0=0.Ответ: Mb=17,084.С-7. Вариант 15.
Дано: Q=3 кН
G=2 кН
R=0,20 м
а=0,6 м
b=0,2 м
c=0,4 м
r=0,05 мНайти: Za, Xa,
Zb,Xb,P.
Решение.
1. Разложим силы.
Qx=Q*cos60
Qz=Q*cos30
Px=P*cos30
Pz=P*cos602. Покажем реакции в опорах.
Za, Xa, Zb, Xb.3. Составим уравнения равновесия.1) ∑xк=0; Xa+Xb-Qx+Px=0.
2) ∑zк=0; Za+Zb+Qz-G-Pz=0.
3) ∑Mx(Fk)=0; Qz*(a+b)+Zb*(a+3b)-G*(a+3b+c)-Pz*(a+3b+c)=0.
4) ∑My(Fk)=0; -Qz*r+P*R=0.
5) ∑Mz(Fk)=0; Qx*(a+b)-Xb*(a+3b)-Px*(a+3b+c)=0.4. Расчет.
Из 4) P=(Qz*r)/R=(3*0,866*0,05)/0,2=0,65
Из 3) Zb=(-Qz*(a+b)+G*(a+3b+c)+Pz*(a+3b+c))/(a+3b)=1,6415/1,2=1,386
Из 5) Xb=(Qx*(a+b)-Px*(a+3b+c))/(a+3b)=(1,2-0,9)/1,2=0,25
Из 1) Xa= -Xb+Qx-Px=-0,25+3*0,5+0,65*0,866=1,8129
Из 2) Za= -Zb-Qz+G+Pz=-1,378-2,598+2+0,65*0,5=-1,641
5.Проверка
∑Mx1(Fk)=0; -Za*0,8+Zb*0,4-G*0,8-Pz*0,8=0.
-1,3128+0,5472-1,6-0,26=0.
0=0.Ответ: P=0,65 кН, Zb=1,368 кН, Xb=0,25 кН, Xa=1,8129 кН, Za= -1,641 кН.
К-1. Вариант 15.Дано: x=4cos(πt/3)
y=-3sin(πt/3)
t1= 1 c.Задание: по заданным уравнениям движения точки М установить вид ее траектории и для момента времени t1 найти положение точки на траектории, ее скорость, полное, касательное и нормальное ускорения, а так же радиус кривизны траектории. Решение.
1. Траектория движения точки y=f(x).
sin(πt/3)=-y/3 + cos(πt/3)=x/4
получаем
1=x2/16+y2/9 траектория движения точки – эллипс. 2. Найдем точку М в момент времени t1= 1 c.
М: x1=4cos(π/3)=2
y1=-3sin(π/3)=-2,63. Найдем скорость точки в момент времени t1:Vx= х = (4cos(πt/3)) = 4π/3*(-sin(πt/3))
Vy= у = (-3sin(πt/3)) = -π*cos(πt/3)Vx1=(-4*3,14)/3*0.866=-3,622
Vy1= -3,14*0,50=-1,57Определим модуль скорости:
V= V2x +V2y= 13,12+2,46= 3,94 см/с4. Найдем ускорение точки в момент времени t1:ax= x = (-4π/3*sin(πt/3)) =-4π2/9*cos(πt/3)
ay= y = (-π*cos(πt/3)) =π2/3*sin(πt/3)ax1=-2,191
ay1=2,846
Определим полное ускорение:
a= ax2+ay2 = 12,9 = 3,6 см/с2
Найдем касательное ускорение точки:
aT= | (Vx*ax+Vy*ay)/V |= | (7,93-4,468)/3,94|=0,88 см/с2
Найдем нормальное ускорение точки:
an= | Vx*ay-Vy*ax| / V= |-10,3 -3,43|/3,94=3,48 см/с2
5. Найдем радиус кривизны траектории
p=V2/an=15,52/3,48=4,46 смРезультат вычислений для заданного момента времени t1.
| Координаты точки, см | Скорость, см/с | Ускорение см/с2 | Радиус кривизны траектории, см | |||||||
| x | y | Vx | Vy | V | ax | ay | a | aT | an | P |
| 2 | -2,6 | -3,622 | -1,57 | 3,94 | -2,191 | 2,846 | 3,6 | 0,88 | 3,48 | 4,46 |
bukvasha.ru
Задание С3
/>
Дано:
/>P1=13,0 kH
/>M=30,0 kH*M ;
MB—?
Решение:
Iсистема
P2=9,0 kH Σx=0;
RA*cos30o– XIC=0;
q=3,0 kH/M Σy=0;
RA*cos60o– P1– YIC=0
ΣMC=0;
M+P1*3-2,5*RA=0;
/>
/>;
/>;
Проверка
ΣMA=0;
/>/>;
/>/>;
-26 — 4+30=0;
0=0; верно.
IIсистема
Σx=0;
/>;
/>;
Σy=0;
/>;
/>;
/>;
ΣMB=0;
/>;
/>;
/>;
/>;
Проверка
ΣMC=0;
/>;
/>;
/>;
0=0; верно.
Дано:
R/>=20cм; r/>=10cм; R/>=30cм; />; x/>=6cм; />; x/>=356cм; t/>=2c; t/>=5c.
Определить
Уравнение движения груза;
/>-?
/>-?
Решение:
1) Уравнение движения груза 1 имеет вид:
/>(1)
--PAGE_BREAK--Коэффициенты />могут быть определены из следующих условий:
при t=0 x/>=6cм, />(2)
при t/>=2cx/>=356cм. (3)
Скорость груза 1:
/> (4)
Подставляя (2) и (3) в формулы (1) и (4), находим коэффициенты
с/>=6см, с/>=5/>, с/>
Таким образом, уравнение движения груза
1 />
2) Скорость груза 1
/> (6)
Ускорение груза 1
/>
3) Для определения скорости и ускорения точки М запишем уравнения, связывающие скорость груза />и угловые скорости колёс />и />.
В соответствии со схемой механизма:
/> откуда />
или с учетом (6) после подстановки данных:
/>
Угловое ускорение колеса 3: />
Скорость точки М, её вращательное, центростремительное и полное ускорения определяются по формулам:
/>
/> />
/>
Результаты вычислений для заданного момента времени />приведены в табл. 1.
Скорости и ускорения тела 1 и точки М показаны на рис. 1.
Таблица 1
/>
/>
/>
/>
/>
/>
/>
/>
57
26
1.9
0.867
19
36.1
19
40.80
/>
В 20. Д – 1
Дано: VA= 0, a= 45°, f= 0,3, d= 2 м, h= 4 м.
продолжение --PAGE_BREAK--Найти: ℓ и t.
Решение: Рассмотрим движение камня на участке ВС. На него действует только сила тяжести G. Составляем дифференциальные уравнения движения в проекции на оси X, Y: />= 0, />= G,
Дважды интегрируем уравнения: />= С1 , />= gt+ C2,
x = C1t + C3, y = gt2/2 + C2t + C4,
Для определения С1, C2, C3, C4, используем начальные условия (при t= 0): x= 0, y= 0, />= VB×cosa, />= VB×sina,
Отсюда находим:
/>= С1, ÞC1= VB×cosa, />= C2 , ÞC2 = VB×sina
x= C3, ÞC3= 0, y= C4, ÞC4= 0
Получаем уравнения:
/>= VB×cosa, />= gt + VB×sina
x = VB×cosa×t, y = gt2/2 + VB×sina×t
Исключаем параметр t:
y= gx2+ x×tga,
2V2B×cos2a
В точке С x = d = 2 м, у = h = 4 м. Подставляя в уравнение d и h, находим VB :
V2B=gx2= 9,81×4 = 19,62, ÞVB= 4,429 м/с
2×cos2a×(y — x×tga) 2×cos245°×(4 — 2tg45°)
Рассмотрим движение камня на участке АВ. На него действуют силы тяжести G, нормальная реакция Nи сила трения F. Составляем дифференциальное уравнение движения в проекции на ось X1:
/>= G×sina— F, (F = f×N = fG×cosa) Þ/>= g×sina— fg×cosa,
продолжение --PAGE_BREAK--Дваждыинтегрируяуравнение, получаем:
/>= g×(sina— f×cosa)×t + C5, x1= g×(sina— f×cosa)×t2/2 + C5t + C6,
По начальным условиям (при t= 0 x10= 0 и />= VA= 0) находим С5и С6:
C5= 0, C6= 0,
Для определения ℓ и tиспользуем условия: в т.B(при t= t), x1= ℓ, />= VB= 4,429 м/с. Решая систему уравнений находим:
/>/>= g×(sina— f×cosa)×t Þ4,429 = 9,81×(sin45°— 0,3×cos45°)×t, Þt= 0,912 с
x1= g×(sina— f×cosa)×t2/2 ℓ = 9,81×(sin45°— 0,3×cos45°)×0,9122/2 = 2,02 м.
Дано:
АВ=20 см.
АС=6 см.
/> см/с
a/>=15 cм/c/>
Найти:/>, />, a/>, a/>, />, />
Решение:
ОА=ОВ=/>/>14,1 см.
/>=0,7/>=/>
СP=/>см.
/>=/>/>
/>=/>/>
продолжение --PAGE_BREAK--/> см/с
a/>=15 см//>,
т.к. ползуны двигаются по направляющим и совершают только поступательное движение.
/> см//>
/> см//>
/>/>9,85 см//>
/> см/с
Ответ:
/> см/с
/> см/с
/>/>9,85 см//>
/>=15 см//>
Статика твердого тела
I. Плоская система сил система произвольно расположенных сил
Определение реакций опор твердого тела
На схеме показаны три способа закрепления бруса. Задаваемая нагрузка и размеры (м) во всех трех случаях одинаковы.
Р = 10 кН, q = 4 кН/м, исследуемая реакция YA
Определить реакции опор для того способа закрепления бруса, при котором исследуемая реакция Ya имеет наименьший модуль.
Дано: схемы закрепления бруса ( а, б, в): Р = 10 кН; q = 4 кН/м.
Определить реакции опор для того способа закрепления, при котором реакция YA имеет наименьшее числовое значение.
Решение
Рассмотрим систему уравновешивающихся сил, приложенных к конструкции. Действие связей на конструкцию заменяем их реакциями (рис. 2): в схеме а — XА, YА, YВ в схеме б — Y’А, Y’В и RC, в схеме в — Y”А , RC, RD. Равномерно распределенную нагрузку интенсивностью q заменяем равнодействующей
/>
Q= q•4 = 16кН.
Чтобы выяснить, в каком случае реакция YA является наименьшей, найдем ее для всех трехсхем, не определяя пока остальных реакций
Длясхемыа
/>
/>
Из первого уравнения подставляем YBво второе, получаем:
/>8,67 кH
Для схемы б
/>
Из первого уравнения подставляем Y’Bво второе, получаем:
/>13 кН
Для схемы в
/>
Из первого уравнения подставляем RDво второе, получаем:
/>5 кН
Таким образом, реакция YAимеет наименьшее числовое значение, при закреплении бруса по схеме в.
Определим остальные опорные реакции для этой схемы.
В схеме а:
/>
В схеме б:
/>8 кН
В схеме в:
Определить реакции опор для способа закрепления бруса, при котором Ма имеет наименьшее числовое значение.
Дано:
Р=20
М=10 кН* q М
q=2 кН/м
Ма = ?
Решение
1. Даны три исходные схемы закрепления бруса мысленно в схемах отбросим связи в точках опор, заменяя их реакциями связей.
/>2. Равномерно-распределённую нагрузку «q» заменяем равнодействующей «Q» и приложим её в центре действия нагрузки «q», получим
/>Q=q*L
Q=2*2=4кН.
3. Для каждой схемы составим минимальное число уравнений равновесия для определения исследуемой реакции.
Cоставим уравнения равновесия:
/>Ma(fr)=0; Ma+M-4P*cos45-3Q=0
Отсюда Ma будет
Ma=-M+P*sin45-3Q=-10+56+12=58kH*м
Ya=.58kH*м
Мa(Fk)=0; Ма -4P*sin45+M-3Q-2Xв=0
F(кх)=0; — Хв+Р*cos45=0 Xв=14кН
Отсюда Ма будет:
Ма=4Р*sin45+3Q+2Xв-M=56+12+28=86кН*м
Ма=86кН
Ma(Fk)=0; Ма+М-4Р*cos45-3Q+4Rc*cos45+2Rc*cos45=0
F(кх)=0; Rc*cos45+Pcos45=0 Rc=20кН
ОтсюдаМабудет:
Ма=-М+4P*cos45+3Q-6Rc*cos45=-10+56+12-84=26кН*м
Таким образом, исследуемая наименьшая реакция будет при закреплении бруса по схеме в). Найдём все реакции.
Составим для этой схемы три уравнения равновесия:
/>
Fкх=0 Rc*cos45+Pcos45=0
Fкy=0 Ya-P*cos45-Q+Rc*cos45=0
Ма(Fк)=0 Ма+М-4Р*cos45-3Q+4Rc*cos45+2Rc*cos45=0
Rc=20кН
Yа= P*cos45+Q-Rc*cos45=7+4-14=3кН
Ма=-М+4P*cos45+3Q-6Rc*cos45=-10+56+12-84=26кН*м
Ответ: Ма=26кН.
www.ronl.ru
Николай Носков
Поскольку линзы эфира возле космических тел (по Френелю и Стоксу) существуют, и в них имеется градиент давлений (по Миллеру), то, согласно экспериментам И.Физо и Л.Фуко, скорость света, во первых, должна быть большей в космосе, чем у поверхности Земли, на что и указывают современные расчеты по результатам наблюдений О.Ремера за спутниками Юпитера, что c=3,05·108 м/с, и, во вторых, при приближении к Земле и к Солнцу она должна уменьшаться, а при удалении – увеличиваться, что и показали точные замеры. Последний факт противоречит релятивистским воззрениям и расчетам по отклонению света возле массивных тел и одновременно показывает, что плотность эфира при приближению к ним растет. Все эти и другие научные факты говорят о том, что отказ от эфира и классических инвариантов пространства, времени и массы был трагической ошибкой. Гипотеза Френеля о частичном увлечении эфира телами должна оказаться вновь в центре внимания.
Однако, возвращаясь к старой доброй классической механике Галилея – Ньютона – Эйлера – Лапласа – Лагранжа, необходимо пристально взглянуть на нее: так ли все гармонично и правильно в ней? Уважение к ней и восхищение ею не должны заменить критического анализа.
И вот теперь, через 300 с лишним лет мы обнаруживаем, что классическая механика состоит из разрозненных, не связанных между собой частей. Так, закон всемирного тяготения не связан с динамикой, которая фактически является динамикой инерции, а сам закон инерции не выделен в отдельное взаимодействие. В итоге оказалось, что все новые формализмы динамики, созданные на основе принципа наименьшего действия (Мопертюи, Эйлер, Лагранж) и закона сохранения энергии (Лагранж, Гамильтон, Якоби, Остроградский), а также бессиловая механика Герца оказываются вариантами динамики инерции, в то время как гравитация осталась девственно первобытной и не затронутой исследователями вплоть до появления работы П.Гербера, в которой гравитация получила наконец обобщение на скорость взаимодействия, то есть была создана гравиодинамика. Факт ее появления был не понят исследователями, что привело физику к кризису в конце Х1Х века и к появлению теорий-заблуждений: СТО и ОТО.
По аналогии с законом Кулона, который является электростатикой, закон всемирного тяготения является гравиостатикой, так как, хотя он выведен для взаимодействия планет движущихся вокруг центральных тел (Солнце – планеты, Земля – Луна), однако величина расстояния, входящая в него, практически – постоянная величина, что означает, что относительная скорость взаимодействующих тел (первая производная от расстояния по времени) по линии их соединяющей, практически равна нулю.
Электростатике Кулона повезло немного больше, чем гравиостатике Ньютона, так как электродинамические законы были выявлены экспериментально Эрстедом, Араго, Ампером и Фарадеем. Но… стоило только появиться теории электродинамики в трудах Гаусса, Вебера, Клаузиуса,… Лоренца, как научный мир, не поняв, что электростатика получила обобщение на скорость взаимодействия, которую они приняли за скорость света, отвернулся от нее. И первым сделал это, как ни странно, сам Лоренц. Лоренц отказался от электродинамики по причине того, что ее законы (кроме уравнений Максвелла, которые являются динамикой полей, но не тел) не подчинились общему принципу относительности, но который Лоренцу очень хотелось ввести. Лоренц, а за ним Пуанкаре, Эйнштейн и за ними все релятивисты небрежно перешагнули через ребенка, который они выплеснули...
И уж если была отвергнута динамика электромагнитного взаимодействия, то куда труднее оказалось гравиодинамике Гербера, судьба которой зависела полностью от одного единственного факта: аномального смещения перигелиев планет. Мало этого, закон гравиодинамики (запаздывания потенциала) Гербера не подчиняется не только общему принципу относительности, но и принципу относительности Галилея (и, следовательно, нет пресловутого равенства тяжелой и инертной масс).
Но в чем вообще был смысл введения общего принципа относительности? Понимая теперь, что динамика классической механики является динамикой инерции, а инерция есть особый вид взаимодействия, который не зависит ни от гравитационного, электромагнитного или ядерного, мы видим, что именно инерция выражает принцип относительности Галилея и является его сущностью. Распространение и обобщение галилеевского принципа (законов инерции) на другие взаимодействия, тем более, не зная, как деформируются законы инерции при больших скоростях, – нечто в себе, что не имеет никаких оснований.
При возникновении общего принципа, а также специальной и общей теорий относительности допущено множество логических ошибок, которые отдельно и все вместе привели к неверным выводам и обобщениям. При рассмотрении, например, гравитации нельзя отрывать взаимодействующие тела друг от друга, помещая одно из них в выдуманную систему отсчета, которой можно давать произвольное (теоретическое) движение. А помещая в эту систему даже оба гравитирующих тела, как можно оторвать их от среды, с помощью которой они взаимодействуют?! Именно эти грубейшие логические ошибки допустил Эйнштейн, рассматривая движение свободно падающего лифта, не подозревая, что он не знает гравиодинамики, то есть свойств и законов сил взаимодействия при относительном движении взаимодействующих тел. В результате ОТО является бессмысленной мешаниной инерции с гравитацией.
При этом релятивисты своеобразно «опровергли» гравиодинамику Гербера. Так, Н.Т.Роузвер в книге «Перигелий Меркурия от Леверье до Эйнштейна» (Мир, 1985) написал: «Вторая причина, по которой закон Гербера следовало бы отвергнуть (первой причиной он назвал правильно предсказываемое Гербером смещение перигелиев планет, но к которому, на взгляд Роузвера, необходимо приплюсовывать релятивистский эффект (?! – Н.Н.)), – это отклонение световых лучей в гравитационном поле Солнца. Расчеты этих отклонений составляют: 2,62" – по теории Гербера и 1,75" – по теории относительности. Экспедиция в Собраль (1919) получила значение 1,98"±0,16"; результат измерений Фрейндлиха (1929) составил 2,24"±0,16"; результат измерений в СССР (1949) оказался 2,73"±0,31". Более поздние измерения не подтвердили столь значительное отклонение, и опровержение теории относительности не состоялось». Но упомянутые эксперименты по отклонению света возле Солнца делали вовсе не противники ТО, но как раз ее приверженцы (особенно – в СССР), поэтому риторический вывод Роузвера об опровержении выглядит очень странным.
Но теперь необходимо вообще подвергнуть сомнению идею отклонения света вблизи массивных тел с позиций релятивистов. Дело в том, что для расчета отклонения берется релятивистская масса фотонов (считается, что фотоны – частицы с нулевой массой покоя) и затем рассчитывается их притяжение по законам Гербера или ТО так, как будто это взаимодействие происходит с бесконечно большой скоростью взаимодействия. Но если считать, что скорость взаимодействия равна скорости света, то отклонения света в результате притяжения не должно быть, так как потенциал взаимодействия будет полностью запаздывать. Но кроме этого здравого рассуждения появился экспериментальный факт замедления фотонов при приближении к Земле и Солнцу и ускорения их при удалении, о котором написано выше, и который показывает абсурдность утверждения релятивистов.
Свойства и законы гравиодинамики связаны с механизмом взаимодействия при относительном движении взаимодействующих тел. Исследование явления запаздывания потенциала на движущемся теле привело меня к выводу о том, что запаздывание потенциала происходит неравномерно. Это приводит к продольным колебаниям движущегося тела. Энергия такого движения тел имеет закон отличающийся от гладкого движения в механике Ньютона, что и стало основанием для появления так называемых «дефекта массы» и «эквивалента массы и энергии».
Основанный на глубоких заблуждениях и логических ошибках, общий принцип относительности породил иллюзию современных исследователей о том, что возможно и даже якобы необходимо совершить «великое» и «сверхвеликое» объединение взаимодействий. Цель и смысл его естественно не поддается здравому смыслу. Но поэт, логика которого безупречна, предупреждал: «В одну упряжку впрячь не можно коня и трепетную лань»
Поскольку логические ошибки, сделанные исследователями в разное время при развитии физики, продолжают довлеть над ней, необходимо сказать несколько слов о самой логике.
Природа на примере работы мозга человека показала, что логика – вершина разума, вершина развития природы, объединяющая в себе все виды математики и опыт накопленный человечеством. Выше логики ничего нет.
Не потому ли мы так ценим труды философов, писателей, поэтов? Все, кто читал «Записки о Шерлоке Холмсе» Конан Дойла, были покорены силой логического мышления Холмса. Работа исследователя в науке сродни работе детектива. Но осмотритесь вокруг, и вы обнаружите, что логика – нелюбимая падчерица науки. Ее не преподают в школах и институтах, она оказывается зачастую предметом спекуляции не только в науке, но и в политике, и в журналистике, и в религии.
У ученых, воспитанных на релятивистских позициях, произошла подмена логики высказываниями авторитетов, штампами и ложными выводами. Особенно много таких выводов было сделано по поводу классических инвариантов и эфира. Основоположниками релятивизма и предводителями борьбы против логически безупречной теории Ньютона явились: Беркли (1685...1753г.), Толанд (1838...1916г.), а затем Дюринг, Мах, Гартман и Авенариус, которых дружно поддержали релятивисты во главе с Минковским и Эйнштейном. Логические ошибки, нечистота логического мышления, нарушение законов научной логики, подмена понятий, вымысел и необоснованные предположения – вот их инструменты борьбы против теории Ньютона.
Релятивисты с момента появления СТО и ОТО (1905...1915) помимо «искривления пространства – времени» успели наворотить (не нахожу более подходящего термина) столько логических ошибок, что только их перечень занял бы больше места чем вся эта статья.
Так, например, для объяснения ядерного взаимодействия были введены гипотетические обменные частицы (Юкава), якобы хорошо описывающие (но не объясняющие) взаимодействие. Далее (о чудо) эти частицы оказались реально существующими, и теперь их существование даже не подвергается сомнению.
Но… что говорит по этому поводу логика? А она говорит о том, что такие частицы должны, во-первых, обладать разумом и, во-вторых, не соблюдаются законы сохранения энергии.
В том же духе можно говорить об «эквиваленте массы и энергии», «волне-частице», «дефекте массы» и т.д. и т.п., что приводит к выводу о том, что у физиков логика не в почете. Здравый смысл, против которого релятивисты объявили войну, является результатом именно логических законов.
www.ronl.ru