
|
|
|
|
 Far Far |
| WinNavigator |
| Frigate |
| Norton
Commander |
| WinNC |
| Dos
Navigator |
| Servant
Salamander |
| Turbo
Browser |
|
|
| Winamp,
Skins, Plugins |
| Необходимые
Утилиты |
| Текстовые
редакторы |
| Юмор |
|
|

|
File managers and best utilites |
Доклад на районном семинаре по теме "Введение робототехники в образовательный процесс". Реферат робототехника
Реферат по робототехнике
Московский Институт Радиотехники Электроники и Автоматики
(Технический Университет)
| по предмету: | “Основы робототехники” |
| тема: | “Роботы-Строители” |
Выполнил:
студент группы КС-5210
Вершинин Ярослав
Проверила:
ассистент кафедры ПУ
Александрова Р.И.
Москва – 2010 г.
Содержание.
Введение. Роботы в Строительстве.
Понятие «Робот»
Машины, используемые в строительстве. Их типы.
2.2. Строительные краны.
2.3. Пневматические вакуумные разгрузчики.
2.4. Пневматический транспорт.
2.5. Цепные конвейеры.
3. Интересные факты и сведения о роботах-строителях.
3.1. Робот-разрушитель от Husqvarna
3.2. Самый сильный промышленный робот в мире
3.3. Роботы-строители покоряют Луну
3.4. Мускулистый робот Core
4. Заключение.
5. Список используемой литературы.
Введение.
Роботы в строительстве.
Сегодня, роботы играют важную роль в развитии технологий строительства сооружений и разных объектов, и с течением времени они будут становиться все более и более используемыми в ежедневных делах.
Большинство строительных рабочих мест являются скучными, трудоемкими, и опасными – как раз то, что подходит для автоматизированных роботов. У роботов есть скорость, ловкость и сила, необходимая, чтобы перевести строительство на новый уровень, улучшить его. От закладки кирпичей, до работы с тонкими, хрупкими окнами, у них есть потенциал, для того чтобы стать ценной и основной частью будущего «строительства».
Роботы - идеальные рабочие, когда дело доходит до пакетирования и упаковывания строительных изделий. Некоторые роботы даже использовались, чтобы построить готовые стены. Некоторые полагают, что строительные роботы приведут к новой, инновационной архитектуре.
Понятие «Робот».
Робот - автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях, при относительной недоступности объекта или для другого использования.
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Человекоподобный робот (после его создания) станет первым универсальным инструментом, так как сможет пользоваться широчайшим набором любых технических средств, уже сделанных человеком для себя.
Появление станков с числовым программным управлением (ЧПУ) привело к созданию программируемых манипуляторов для разнообразных операций по загрузке и разгрузке станков. Появление в 70-х гг. микропроцессорных систем управления и замена специализированных устройств управления на программируемые контроллеры позволили снизить стоимость роботов в три раза, сделав рентабельным их массовое внедрение в промышленности. Этому способствовали объективные предпосылки развития промышленного производства.
Машины, используемые в строительстве.
Строительные краны.
Строительные краны широко применяют в гражданском, промышленном, энергетическом и гидротехническом строительстве при выполнении монтажных работ, а также при вертикальном и горизонтальном перемещении грузов. Находят они также применение на складах и полигонах предприятий строительной индустрии. От других видов кранов башенные краны отличаются высоким расположением стрелы, что вместе с достаточным вылетом крюка обеспечивает большое подстреловое пространство, в котором может разместиться возводимое сооружение.
По конструктивному исполнению башенные краны могут быть разделены на три основные группы: самоходные по наземным подкрановым рельсовым путям; приставные краны с башней, прикрепляемой к возводимому сооружению; самоподъемные, опирающиеся на каркас сооружения. Для строительства зданий до 6 этажей применяют в основном самоходные башенные краны, перемещающиеся по наземным подкрановым (рельсовым) путям, а для более высоких зданий — приставные или же самоподъемные, опирающиеся на каркас здания. В строительстве применяются также краны, собираемые из стандартных сборочных единиц башенных кранов — это и краны-погрузчики и другие краны, отличающиеся уменьшенной высотой башни или ее отсутствием. Эти краны применяют при возведении подземной части здания, а краны-погрузчики — на предприятиях строительных конструкций (полигонах и складах заводов железобетонных изделий).
По конструктивному исполнению башенные краны делятся на краны с поворотной башней и краны с неповоротной башней. По способу изменения вылета крюка различают башенные краны с управляемой (маневровой) стрелой и краны с грузовой тележкой, перемещающейся по стреле. Металлоконструкции основных элементов башенных кранов могут быть решетчатые или сплошные трубчатые.
Пневматические вакуумные разгрузчики.
Пневматические вакуумные разгрузчики цемента применяются для разгрузки цемента из крытых вагонов. Вакуумный разгрузчик цемента состоит из самоходного заборного устройства, гибкого рукава цементовода, осадительной камеры с рукавными фильтрами, винтового питателя, воздуховода и вакуум-насоса.
В процессе разгрузки цемента самоходное заборное устройство разгрузчика заходит в вагон и подгребающими дисками подает цемент к всасывающему соплу; цемент под действием вакуума транспортируется по гибкому цементоводу в осадительную камеру. В осадительной камере цемент вследствие резкого падения скорости потока осаждается на дно. Воздух же, проходя рукавные фильтры, очищается от взвешенных частиц цемента и, пройдя по воздуховоду в вакуум-насос, выбрасывается в атмосферу. Цемент из осадительной камеры винтовым питателем передается в приемное устройство склада.
При монтаже вакуумного разгрузчика на месте эксплуатации осадительную камеру устанавливают в помещении прирельсового склада над приемным устройством для дальнейшего транспортирования цемента. Вакуум-насос с электродвигателем, шкаф с электроаппаратурой устанавливаются в отдельном отапливаемом помещении, смежном со складом. Производительность существующих пневматических вакуумных разгрузчиков от 15 до 60 т/ч.
Пневматический транспорт.
В установках пневматического транспорта материал перемещается потоком воздуха по трубопроводам во взвешенном состоянии или же в контейнерах (капсулах).
Пневмотранспортные установки применяются на предприятиях строительной индустрии для перемещения сыпучих материалов (цемента, сухого песка, мелкого угля, щепы, опилок). При использовании контейнеров могут перемещаться также щебень и другие материалы.
Преимуществом пневмотранспортных установок является возможность перемещать материалы в любом направлении и одновременно в несколько пунктов Они удобны и своей компактностью: транспортные линии можно располагать в траншеях, подвешивать на столбах, кронштейнах, не занимая много места в производственных помещениях. Благодаря герметичности трубопроводов потери транспортируемого материала незначительны. Высокая производительность и дальность транспортирования и относительно невысокие затраты на сооружение установок также являются их положительными качествами. Но вместе с тем у пневматических транспортных установок (за исключением аэрационных) высокий удельный расход энергии (в 3—6 раз больше, чем у конвейеров с механическим приводом) и быстрый износ трубопроводов при транспортировании абразивных материалов. Установки пневматического транспорта разделяются на всасывающие (вакуумные), нагнетательные и аэрационные.
Цепные конвейеры.
Тяговым органом у цепных конвейеров является бесконечная цепь, к которой присоединены пластины или скребки.
К цепным относятся пластинчатые и скребковые конвейеры. Пластинчатые конвейеры применяются в качестве основного транспортирующего устройства и в качестве питателя ленточного конвейера для перемещения тяжелых крупнокусковых материалов и штучных грузов.
Транспортирующий орган пластинчатых конвейеров состоит из отдельных металлических или деревянных пластин, прикрепленных к двум длиннозвеньевым цепям. Цепи огибают приводную и натяжную звездочки и и в пролете опираются своими роликами на гладкие направляющие станины. Цепи применяют длиннозвеньевые, втулочные, втулочно-роликовые и втулочно-колесные с гладкими или ребордными колесами. Для увеличения количества перемещаемого материала пластинчатые конвейеры делают с бортами, укрепленными на станине, или с ребрами, укрепленными на пластинах. Такие конвейеры называют лотковыми. Оснащенные пластинами волнистого или коробчатого профиля, они могут подавать грузы под углом до 30°.
Скребковые конвейеры применяются для перемещения кусковых и сыпучих грузов на короткие расстояния и под большим углом наклона. Они конструктивно просты и удобны для загрузки и. разгрузки материалов, но требуют большого расхода энергии и быстро изнашиваются.
Скребковый конвейер состоит из неподвижного желоба и движущегося в нем тягового органа в виде бесконечных цепей с прикрепленными к ним скребками. Материал, загружаемый в желоб, перемещается скребками по его дну и разгружается в конце желоба или в любом месте через донные отверстия.
Интересные факты и сведения о роботах-строителях.
Робот-разрушитель от Husqvarna.
«Ломать – не строить», но все же роботы-разрушители тоже важны для строительных робот. Речь идёт не об игрушках или шоу типа «драки роботов», компания Husqvarna представила первого в своём роде строительного робота-разрушителя, способного работать в труднодоступных или опасных для человека условиях. Специализация аппарата – демонтаж крупных строений и снос перегородок внутри здания. Роботизированная машина DXR 310 работает на основе гидравлики и электричества – её питает «экологически чистый» 22-киловаттный электромотор.
Устройство способно передвигаться самостоятельно (что очень хорошо, ибо весит машина без малого 2 тонны). Этого робота оснастили двумя гусеницами, которые могут сдвигаться для того, чтобы робот мог протиснуться в дверные проёмы шириной до 78 см. Для устойчивости на неровных поверхностях у робота DXR 310 есть четыре «лапы», позволяющих закрепиться для работы в стационарном режиме. Машина управляется дистанционно с помощью пульта ДУ и способно работать разнообразным навесным оборудованием: отбойным молотком, клешнями или ковшом экскаватора. Стоимость этой милой игрушки Husqvarna пока не уточнила.
Самый сильный промышленный робот в мире – KUKA KR 1000 “Titan”
Германская компания KUKA Roboter представила самого большого и сильного робота в мире: не какого-нибудь фантастического "гуманоида-переростка", а серийный промышленный манипулятор.
KUKA KR 1000 "Titan" может поднимать на вытянутой "руке" одну тонну. Он обладает досягаемостью в 3,2 метра по окружности (так что может переносить объекты на расстояние в 6,4 метра), а по высоте способен перемещать свою "кисть" на 4,2 метра.
Робот оснащён 9 моторами, которые могут вращать его сочленения по шести осям. По объёму рабочей зоны новый робот оставляет далеко позади другие промышленные манипуляторы.
Достигнутое сочетание скорости и точности с рекордной мощностью открывает перед промышленными предприятиями новые возможности. Например, этот манипулятор может в одиночку перемещать и поворачивать автомобильный кузов.
На других заводах "по плечам" новому роботу будет подъём тяжёлых отливок, стеклопакетов с суммарной толщиной в метр, крупных бетонных элементов будущих зданий.
Как сказано в пресс-релизе компании, робот может выдерживать статическую нагрузку на изгиб до 60 тысяч ньютон-метров.
Роботы строители покоряют луну.
Роботы могут быть первыми рабочими-строителями на луне согласно недавнему исследованию НАСА.
В сообщении говорится, что два робота с дистанционным управлением смогли построить посадочную площадку для лунной станции меньше чем за шесть месяцев — к тому же это более безопасно и более дешево, чем если бы строили люди.
НАСА планирует создать лунную станцию к 2024 году. Будет создано отличное человеческое жилье, с защитой от возможных метеоритов и космических аномалий.
Но все-таки существует проблема с посадкой пассажирского транспортного средства на специальные площадки, из-за неких «песчаных помех». "Проблема реальна, и вопрос состоит в том, как НАСА будет решать это" - сказал Дэвид Гамп, президент Astrobotic Technology, Inc., которая предпринимает новые исследования наряду с исследователями из Университета Карнеги-Меллона.
Исследователи пришли к заключению, что пара 330-фунтовых (150-килограммовых) роботов, размером примерно с газонокосилку, лучше всего сделали бы эту работу. Основная миссия роботов состояла бы в том, чтобы стабилизировать участки свободной лунной почвы и установить стены 8.5 футов (2.6 метра высотой) высотой вокруг этих специальных площадок.
Исследователи говорят, что они нуждаются в большей информации об условиях почвы в лунных полюсах - наиболее подходящих мест для станции - прежде, чем они смогут построить строительных роботов опытного образца.
Гамп оценивает, что два робота плюс транспортное средство будут стоить США, от 200 до 300 миллионов $ - и роботы смогут продолжить обеспечивать станцию даже после того, как посадочная площадка будет защищена. Например, он сказал, роботы "смогут быть перевозчиками, чтобы перемещать поставки или образцы с места на место и возвращать астронавтов на станцию."
Мускулистый робот Core.
Очередная разработка японских ученых, которая поможет людям в строительных работах с тяжелыми грузами или в опасных для жизни местах и ситуациях. Возможно, в не столь отдаленном будущем мы сможем воочию увидеть грозных двуногих роботов, несущих в своем кузове пилота-человека. Или хотя бы роботизированных грузчиков – именно на такие мысли наводит последняя разработка fuRo, одного из подразделений Технологического института Чибы (Chiba Institute of Technology). Двухметровый робот под названием Core весит примерно 230 кг, а также располагает системой специально разработанных моторов и амортизаторов. Для чего такие ухищрения? А для того, чтобы без проблем брать «на борт» и переносить грузы массой до 100 кг.
Создатели позиционируют Core как базу для дальнейшей разработки машин-тяжеловесов, способных снять с человеческих плеч часть нагрузок на различных производственных линиях и погрузочно-разгрузочных работах.
Заключение.
В 21 веке информационных технологий наука о роботах стремительно развивается и растет. Роботы существуют для того, чтобы помогать людям, возможно даже учить их. Роботы-строители в ближайшем будущем станут незаменимыми помощниками в любых строительных работах, начиная от закладки кирпича и заканчивая сносом зданий.
Список используемой литературы:
Накано «Введение в робототехнику»
www.science.compulenta.ru
www.freeresearcher.net
www.mivs.ru
www.roboting.ru
www.nationalgeographic.com
www.youtube.com
www.robots.com
www.wikipedia.org
studfiles.net
Реферат - Промышленная робототехника - 1.docx
Реферат - Промышленная робототехника (43.5 kb.)Доступные файлы (1):1.docx
Радиотехнический лицей №19Реферат на тему: «Промышленная робототехника»
Выполнил: студент гр. 42 Пушкарев Д. В.
Проверил: преподаватель Летова Н. М.
Ижевск 2008 г.
Содержание:
Введение………………………………………………………………………….…3
1. Основные сведения о робототехнике………………………………….……….5
2. Основные задачи…………………………………………………………….…..8
2.1 Манипуляции изделиями и заготовками………………………………….….8
2.1.1 Загрузочно-разгрузочные работы……………………………………………8
2.1.2 Перенос изделий с одной производственной установки на другую……..8
2.1.3 Упаковка………………………………………………………………...…….9
2.1.4 Погрузка тяжелых предметов на конвейер или паллеты…………….……9
2.2 Обработка деталей и заготовок………………………………………………..9
2.2.1 Сварка…………………………………………………………….…….……..9
2.2.2 Обработка резаньем…………………………………………………………10
2.2.2.1 Сверление……………………………………………………………….…10
2.2.2.2 Бесконтактная обработка заготовок………………………………….…11
2.3 Нанесение различных составов на поверхность……………………….…...12
2.4 Чистовая обработка………………………………………………………..…..12
2.5 Испытания и контроль…………………………………………………..…….13
2.6 Сборка…………………………………………………………………….….…13
2.7 Монтаж печатных плат…………………………………………………..……14
Заключение………………………………………………………………………...15
Список использованной литературы………………………………………...…..16
Введение
Промышленная робототехника является одним из новых направлений
автоматизации производственных процессов, начало развития, которого в нашей
стране относится к последнему десятилетию. Комплексный подход к
решению технико-экономических и социальных задач, связанных с
внедрением их промышленных роботов (ПР), позволил высвободить
около 2000 рабочих. В процессе создания, производства и внедрения ПР
приходилось сталкиваться •с решением ряда сложных научно-технических
проблем. Получен большой, опыт по разработке робототехнических комплексов
(РТК) и организации автоматизированного производства на базе ПР. Все эти
вопросы, получившие отражение в предлагаемой книге, представляют, по
нашему мнению, значительный интерес как для широкого круга специалистов,
конструкторов и производственников различных отраслей, которые заняты
в настоящее время работой по увеличению производства и широкому
применению ПР во всех отраслях народного хозяйства, так и для всех
специалистов, работающих в области автомати- зации производственных
процессов.
Современный этап научно-технической революции характеризуется
комплексной автоматизацией производства на базе систем машин—автоматов. До
недавних пор в основном применяли специализированные автоматы и
автоматические линии, незаменимые в массовом производстве, но
нерентабельные в условиях серийного и мелкосерийного производства из-за
высокой стоимости, а также длительности разработки, внедрения и перена-
ладки их на новую продукцию. Традиционное управляемое вручную оборудование
обеспечивает достаточную гибкость производства, но требует примене-ния
квалифицированного труда рабочих и имеет низкую производительность.
За последние десятилетия автоматизация основных технологических
операций (формообразование и изменение физических свойств деталей) достигла
такого уровня, что вспомогательные операции, связанные с транспортировкой и
складированием деталей, разгрузкой и загрузкой технологического
оборудования, выполняемых вручную либо с помощью существующих средств
механизации и автоматизации, являются тормозом как в повышении
производительности труда, так и в дальнейшем совер-шенствовании технологии.
Обычными методами с помощью существующих технических средств невозможно
автоматизировать сборочные, сварочные, окрасочные и многие другие операции.
Все это привело к острым противо-речиям между совершенством промышленной
техники и характером труда при ее использовании, потребностью в трудовых
ресурсах и их фактическим наличием, требованиями интенсификации
производственных процессов и ограниченными психофизиологическими
возможностями человека. Эти причины социального, экономического и
технического характера, ставшие основными сдерживающими факторами в
развитии производства и даль-нейшем повышении производительности труда, а
также современные достижения в создании орудий производства, вычислительной
техники и электроники привели к бурному развитию робототехники — отрасли,
создавшей и производящей новую разновидность автоматических машин —
промышленные роботы. По замыслу разработчиков эти машины предназ-начены для
замены человека на опасных для здоровья, физически тяжелых и утомительно
однообразных ручных работах. Свое название они получили благодаря
реализованной в них идеи моделирования двигательных, управ-ляющих и, в
некоторой степени, приспособительных функций рабочих, занятых на
повторяющихся трудовых операциях по разгрузке-загрузке технологического
оборудования, управлению работой этого оборудования, межоперационному
перемещению и складированию деталей, а также на различных сборочных,
сварочных, окрасочных и других операциях, выполняемых с применением
переносных орудий труда.
Промышленные роботы (ПР) оказались тем недостающим звеном, появление
которого позволило решать задачи комплексной автоматизации на более высоком
уровне, объединяя средства производства предприятия в единый
автоматизированный комплекс.
1. Основные сведения о робототехнике
Ближайшими по назначению прототипами для ПР послужили автоопе-раторы и
механические руки, уже давно применяющиеся в промышленности, но не
удовлетворяющие производственников по причинам их узкой специализации,
плохой переналаживаемости, небольшого числа выполняемых функций и
ограниченной (массовым и крупносерийным производством) области применения.
Недостатки, присущие этим прототипам, в конструкциях ПР были в значительной
степени устранены посредством увеличения их манипуляционных возможностей,
снабжения собственной системой привода и системой программного управления.
Благодаря этому созданные устройства приобрели качественно новые свойства:
автономность в смысле невстроенности в технологическое оборудование и
способность работать автоматически по заданной программе; универсальность,
т. е. способность перемещать в пространстве объекты различного типа по
сложным пространственным траекториям, сопрягаемость с достаточно большим
количеством типов технологического оборудования и хорошую
переналаживаемость на различные сменяющиеся виды работ.
В настоящее время под роботом понимают автоматический манипуля-тор с
программным управлением. В зависимости от участия человека в про-цессах
управления роботами их подразделяют на биотехнические и авто-номные, или
автоматические.
К биотехническим роботам относятся дистанционно управляемые копирующие
роботы; экзоскелетоны; роботы, управляемые человеком с пульта управления;
полуавтоматические роботы.
Дистанционно управляемые копирующие роботы снабжены задающим органом
(например, манипулятором, полностью идентичным исполнитель-ному),
средствами передачи сигналов прямой и обратной связи и средствами
отображения информации для человека-оператора о среде, в которой функ-
ционирует робот.
Экзоскелетоны выполняются в виде антропоморфных конструкций, обычно
«надеваемых» на руки, ноги или корпус человека. Они служат для
воспроизведения движений человека с некоторыми необходимыми усилиями и
имеют иногда несколько десятков степеней подвижности.
Роботы, управляемые человеком с пульта управления, снабжаются системой
рукояток, клавиш или кнопок, связанных с исполнительными механизмами
каналов управления по различным обобщенным координатам. На пульте
управления устанавливают средства отображения информации о среде
функционирования робота, поступающей к человеку по радиоканалу связи.
Полуавтоматический робот характерен сочетанием ручного и автомати-
ческого управления. Он снабжен супервизорным управлением для вмешательства
человека в процесс автономного функционирования робота путем сообщения ему
дополнительной информации с помощью указания цели,
последовательности действий и т. п.
Роботы с автономным или автоматическим управлением обычно подразделяют
на производственные и научно-исследовательские роботы, которые после
создания и наладки в принципе могут функционировать без участия человека.
По областям применения производственные роботы подразделяют на
промышленные, сельскохозяйственные, транспортные, строительные, бытовые и
т. п.
За короткий период развития роботов произошли большие изменения в
элементной базе, структуре, функциях и характере их использования. Это
привело к делению роботов на поколения.
Роботы первого поколения (программные роботы) имеют жесткую программу
действий и характеризуются наличием элементарной обратной связи с
окружающей средой, что вызывает определенные ограничения в их применении.
Роботы второго поколения (очувствленные роботы) обладают коор-динацией
движений с восприятием. Они пригодны для малоквалифици-рованного труда при
изготовлении изделий. Программа движений робота требует для своей
реализации управляющей ЭВМ.
Неотъемлемая часть роботов второго поколения — алгоритмическое и
программное обеспечение, предназначенное для обработки сенсорной информации
и выработки управляющих воздействий.
Роботы третьего поколения относятся к роботам с искусственным
интеллектом. Они создают условия для полной замены человека в области
квалифицированного труда, обладают способностью к обучению и адаптации в
процессе решения производственных задач. Эти роботы способны понимать язык
и вести диалог с человеком, формировать в себе модель внешней среды с той
или иной степенью детализации, распознавать и анализировать сложные
ситуации, формировать понятия, планировать поведение, строить програм-мные
движения исполнительной системы и осуществлять их надежную отработку.
Появление роботов различных поколений не означает, что они
последовательно приходят на смену друг другу. В процессе развития
совершенствуются функциональные возможности и технические характеристики
роботов различных поколений.
К роботам первого поколения относят обычно промышленные роботы. По
количеству внедренных ПР наша страна занимает одно из ведущих мест в мире.
Блок-схема ПР представляет собой сложную конструкцию (рис.1),
включающую ряд систем: механическую, приводов управления, связи с
оператором, информационную, а также операционное устройство.
Механическую систему выполняют, как правило, в виде манипулятора,
имеющего несколько степеней подвижности, укрепленного на неподвижном или
подвижном
основании; она обеспечивает перемещение рабочего органа с определенным
грузом. Форма и габаритные размеры манипулятора определяются видом и
особенностями технологического процесса, для которого он предназначен.
Созданные модели ПР представляют собой по существу многокоординатные
манипуляторы с программным управлением, программируемые по первому циклу.
Их системы управления помимо основных функций по управлению движением
рабочих органов манипулятора обеспечивают выдачу сигналов на обслуживаемое
оборудование, прием сигналов от простейших датчиков внешней информации,
работающих по принципу Да—Нет, и использование этих сигналов в целях выбора
той или иной подпрограммы работы из числа заданных оператором. Наличие
внешнего контура управления существенно расширило области применения
созданных ПР, так как позволило использовать их по отношению к
автоматизированному процессу не только в качестве универсальных
манипулирующих, но также и в качестве управляющих устройств. Наличие
датчиков и соответствующих электронных схем внешней информации придало этим
ПР принципиально новую способность адаптации к изменяющимся условиям
работы.
Привод для каждой из координат ПР обеспечивает силовое воздействие на
соответствующий механизм, осуществляющий задаваемое перемещение. Приводом
служит автоматическая система, входным сигналом которой является
детерминированное воздействие управляющей системы, а выходным сигналом —
механическое перемещение.
Разработка типажа ПР, имеющего существенное значение для организации
их производства, проведения научно-исследовательских и опытно-
конструкторских работ еще не закончена. В настоящее время наиболее
разработан типаж ПР первого поколения. Так, например, в станкостроительной
и инструментальной промышленности по структуре типаж этих ПР подразделяют
на следующие группы и подгруппы: универсальные ПР, обслуживающие различное
технологическое оборудование и выполняющие различные основные
технологические операции; целевые ПР подъемно-транспортной группы
(многоцелевые), обслуживающие различное технологическое оборудование,
выполняющие транс-портно-складские и специальные работы; целевые ПР
производственной группы (многоцелевые) для выполнения различных
технологических операций сварки, очистки и подготовки деталей, окраски и
нанесения покрытий, разборки, контроля, измерения, отбраковки, разметки и
сборки.
2. Основные задачи
Рассмотрим конкретные задачи, которые роботы решают в настоящее время
на промышленных предприятиях. Их можно разделить на три основных категории:
- манипуляции заготовками и изделиями
- обработка с помощью различных инструментов
-сборка.
2.1 Манипуляции изделиями и заготовками
При разгрузочно-загрузочных и транспортных операциях робот заменяет
пару человеческих рук. В его обязанности не входят особенно сложные
процедуры . Он всего лишь многократно повторяет одну и туже операцию в
соответствии с заложенной в нем (роботе) программой . Рассмотрим типичные
применения таких роботов .
2.1.1 Загрузочно-разгрузочные работы
Во многих отраслях машиностроительной промышленности используются установки
для литья, резки и ковки. В большинстве случаев последовательность
выполняемых ими операций весьма проста. Вначале заготовки загружают в
производственную установку, которая затем обрабатывает их строго
определенным образом, и, наконец, готовые детали извлекают из нее. Загрузку
и разгрузку, как правило, выполняют рабочие или в тех случаях, когда
применимы средства жесткой автоматизации, специализированные механизмы,
рассчитанные на операции только одного вида. Роботы могут здесь оказаться
полезными, если характер таких загрузочно-разгрузочных операций время от
времени меняется.
Например, в литейном производстве роботы используются как для
дозированной разливки расплавленного алюминия , так и для извлечения из
пресс-формы затвердевших отливок и охлажденияих . Такой подход обладает
двумя преимуществами . прежде всего роботы гарантируют более строгое
соблюдение требований технологического процесса : действую и соответствии с
заданной программой , они всегда вводят в установку точно дозированное
количество металла. Затем в строго определенные моменеты времени они
извлекают из нее отформованные детали. Благодоря точному соблюдению
технологического процесса строго соблюдаются и характеристики изделий .
Второе преимущество данного подхода заключается в том , что
значительно облегчается работа оператора . Извлечение раскаленного куска
металла из пресс-формы одна из мало привлекательных работ , и желательно ,
чтобы ее выполнял робот . Таким образом роль человека сводится к контролю
за протеканием процесса и управлению действиями робота с помощью
компьютера.
2.1.2 Перенос изделий с одной производственной установки на другую
Во многих отраслях машиностроительной промышленности погрузочно-
разгрузочные механизмы предназначены для перемещения изделий с одного
производственного участка на другой . И при выполнение таких перемещений
роботы играют немаловажную роль .
На заводе фирмы IBM в Пикипси (шт. Нью-Йорк), выпускающем
компьютеры, роботы загружает магнитные диски в систему, где на них
записывается необходимая информация. Программа , управляющая роботом ,
содержит инструкции относительно того, в какую из четырех установок для
записи следует загружать тот или иной “пустой” диск. Кроме того, программа
задает конкретный набор команд, который соответствующая установка должна
занести на диск . Тот же робот осуществляет и два других этапа этого
технологического процесса. Он извлекает диск из записывающей установки и
помещает его в устройство, которое струей сжатого воздуха прижимает к
поверхности диска самосклеивающуюся метку. Затем робот вынимает диск с
помощью захватного приспособления и упаковывает его конверт.
Подобный робот разработан и внедрен на английском
автомобилестроительном заводе. Он передвигается на гусеницах между пятью
производственными участками завода. Робот извлекает пластмассовую деталь
автомобиля из установки для инжекторного пресования и последовательно
переносит деталь на доводочные участки, где с нее снимаются облои и
заусенцы. Далее робот помещает деталь на специализированный станок, который
полирует ее. И наконец деталь перемещается с полировального станка на
конвеер.
2.1.3 Упаковка
Практически все бытовые и промышленные товары необходимо упаковывать,
и для роботов не представляет сложности поднимать готовые изделия и
помещать в какую-либо тару.
На заводах одной из кондитерских фирм Англии специализированные
роботы занимаются укладкой конфет в коробки. Эти машины весьма сложны и
совершенны. Во-первых они обращаются с продукцией очень аккуратно: сжав
шоколадное изделие, они могут нарушить его форму или раздавить его. Во-
вторых, робот соблюдает высокую точность при укладке конфет в коробки,
помещая их в определенные ячейки коробки.
2.1.4 Погрузка тяжелых предметов на конвейер или паллеты
Помимо упаковки миниатюрных изделий, а также промышленных и бытовых
товаров роботы иногда выполняют и погрузку тяжелых предметов. По существу
они здесь заменяют подъемно-транспортные машины, управляемые оператором-
человеком.
2.2 Обработка деталей и заготовок
Хотя роботы, выполняющие обработку изделий с помощью различных
инструментов и нашли пока менее широкое применение, чем аналогичное
оборудование для транспортировки деталей и заготовок, они про-
демонстрировали свою эффективность при решении многих задач.
2.2.1 Сварка
Эта операция чаще всего выполняется с помощью роботов ,
предназначенных для манипулирования инструментом . роботы могут
осуществлять два вида сварки : точечную контактную и дуговую . В обоих
случаях робот удерживает сварочный пистолет , который пропускает ток через
две соединяемые металлические детали .
В соответствии с управляющей программой сварочный пистолет может
перемещатся практически не отклоняясь от заданной траектории . И если
программа отлаженна хорошо , сварочный пистолет прокладывает шов с очень
высокой точностью .
Большинство роботов для точечной сварки применяется в автомобильной
промышленнсти. При сборке автомобиля необходимо выполнить огромное
количество операций точечной сварки , чтобы надлежащим образом соединить
между собой различные детали кузова, например боковины, крышу и капот. На
современных конвейерах эти детали вначале соединяются временно несколькими
прихваточными сварными соединениями . Далее кузов перемещается по конвейеру
мимо группы роботов, каждый из которых осуществляет сварку встрого
определенных местах. Поскольку все кузова, монтируемые на одной
производственной линии , для получения высококачественных соединений просто
требуется , чтобы робот каждый раз повторял заданную последовательность
перемещений .
При очевидных преимуществах такого использования роботов существует
ряд и серьезных технических проблем. Запрограммировать робот весьма
непросто. Необходимо не только задать точный маршрут движения манипулятора,
но и подготовить инструкции, в соответствии с которыми регулируется
напряжение и сила тока в каждой точке маршрута. А эти параметры могут
меняться, например, в зависимости от толщины свариваемого материала или от
того, какую форму имеет прокладываемый шов - прямую или криволинейную.
Также необходимо сконструировать фиксаторы , удерживающие детали в
процессе сварки таким образом, чтобы сварка осуществлялась при высокой
точности позиционирования. Когда сварочный пистолет держит человек , он
способен учитывать незначетельные смещения заготовки. Сварщик-человеку лишь
слегка сместит инструмент, с тем чтобы выполнить шов в заданном месте .
Робот же не способен принимать подобные решения , если фиксаторы допускают
перекос или смещение, то существует вероятность того ,что сварные швы будут
расположенны с отклонением. Кроме того, фиксатор должен быть таким, чтобы
манипулятор имел доступ к детали с разных сторон.
Следующая проблема касается допусков на изготавливаемые детали.
Сварщик-человек принимает во внимание неизбежные отклонения в размерах, но
роботу подобная коррекция не под силу. Таким образом, когда сварка
осуществляется с помощью автоматики, допуски на детали, изготавливаемые на
других участках предприятия, должны быть минимальными.
Характер воздействия, которое роботы оказывают на другие этапы
производственного процесса (весьма вероятно , что оно приведет к тесной
привязке всех технологических операций ), называется “принципом домино” в
робототехнике.
2.2.2 Обработка резаньем
2.2.2.1 Сверление
Как правило операцию сверления осуществляют на станке. При
использовании робота в его захватном приспособлении закрепляется рабочий
инструмент , который перемещается над поверхностью обрабатываемой детали ,
высверливая отверстия в нужных местах . Преимущество подобной процедуры
проявляется в тех случаях , когда приходится работать с крупногабаритными и
массивными деталями или проделывать большое число отверстий.
Операции сверления играют значительную роль в производстве самолетов:
они предшествуют клепке, при которой в отверстия вставляются миниатюрные
зажимные детали, скрепляющие между собой два листа металла. В деталях
самолетов необходимо проделывать сотни, а то и тысячи отверстий под
заклепки, и вполне естественно , что такую операцию поручили роботу .
Английская компания изготавливает детали механизма бомбосбрасывания,
предназначенного для истребителя “Торнадо”. Механизм представляет собой
цилиндрическую конструкцию длиной примерно 6м, к которой требуется
приклепать кожух из восьми металлических панелей. В кожухе необходимо
просверлить около 3000 отверстий под заклепки. Проблема заключалась в том,
как добиться, чтобы робот, оснащенный высокоскоростной сверлильной головкой
, проделывал отверстия точно в заданных местах .
Инженеры пришли к выводу, что данную проблему можно решить следующим
образом: рабочий просверливает ряд эталонных отверстий (примерно через метр
друг от друга) вдоль панелей , которые размещаются надлежащтм образом
поверх цилиндрической конструкции . Манипулятор с закрепленным в его зажиме
сенсорным зондом (а не сверлом) перемещается над поверхностью заготовки ,
посылая в память робота данные о местонахождении эталонных отверстий .
Затем робот расчитывает точные координаты остальных отверстий , исходя из
этих базовых точек . Затем робот , завершив операцию сверления , удаляет
оставшиеся в отверстиях крошечные частицы металла специальным инструментом.
2.2.2.2 Бесконтактная обработка заготовок
Из-за малой жесткости и недостаточной твердости, роботы не могут
проводить обработку твердых материалов резаньем. Поэтому инженеры изучают
бесконтактные методы обработки материалов, подобных металлу или пластику.
Для этой цели, в частности, используется лазер. В рабочем органе робота
закреплен прибор , который направляет высокоэнергетическое когерентное
излучение лазера (для чего нередко используется волокно-оптическая система
передачи) на обрабатываемую заготовку . Лазер может с высокой точностью
резать пластины из металла, в частности стали. Робот перемещает рабочий
орган над обрабатываемым листовым материалом по траектории, определяемой
программой. Программой же регулируется интенсивность светового луча в
соответствии с толщиной нарезаемого материала .
Другой бесконтактный метод резанья основан на использовании струи
жидкости. Такой подход впервые применила компания “Дженерал моторс”. На ее
заводе в Адриане установлена система с 10 роботами, изготавливающая
пластмассовые детали нефтеналивных цистерн. Восемь из десяти роботов
напрявляют водяные струи под высоким давлением на перемещаемые конвеером
пластмассовые листы. Эти струи прорезают в исходном материале ряд отверстий
и щелей, а также удаляют лишние элементы пластмассовых прессованых деталей.
по утверждению представителей компании “Дженерал моторс”, подобная
роботизированная система весьма экономична , поскольку исключает износ
инструмента и позволяет повысить качество операций резанья. Поскольку
система управляется программой, которая находится в памяти центрального
компьютера, для контроля и обслуживания всех 10 роботов требуется только
два оператора.
2.3 Нанесение различных составов на поверхность
На большенстве предприятий после таких операций, как резанье,
производится обработка поверхности только что изготовленных деталей (чаще
всего окраска). Это еще один тип производственных операций , которые
способен выполнять робот если его оснастить пульверизатором. В память
робота закладывается программа, обеспечивающая выполнение определенной,
многократно повторяемой последовательности перемещений. Одновременно
программа регулирует скорость разбрызгивания краски. В результате на
поверхности окрашиваемой детали образуется равномерное покрытие, причем
нередко робот обеспечивает более высокое качество окраски, чем человек,
которому свойственна неточность движений. Среди других процедур обработки
поверхности можно отметить напыление антикоррозийных жидкостей на листы
металла для защиты их от химического или физического воздействия окружающей
среды, а также нанесение клеевых составов на поверхность деталей подлежащих
соединению. Автомобилестроительные компании исследовали возможность
применения последней операции на этапе окончательной “подгонки” готовых
узлов, в частности при монтаже таких элементов, как хромовые вкладыши на
кузове автомобиля. При выполнении подобных операций робот помещают в
оболочку, которая защищает его от попадания клея и других связующих
веществ. Его также можно “обучить” тому, чтобы он время от времени
самостоятельно очищался, погружая захватное приспособление в очищающую
жидкость.
2.4 Чистовая обработка
Самой “непопулярной” операцией в механообработке , которая к тому же
труднее потдается автоматизации, является, пожалуй, удаление заусенцев,
посторонних частиц и зачистка.
Такая чистовая обработка-весьма непростая процедура. Рабочий подносит
обрабатываемую деталь к абразивному инструменту , который стачивает острые
края и шероховатости на поверхности изделия . Данная процедура занимает
важное место в технологическом процессе , однако выполнять ее вручную
весьма непросто.
Возможности использования роботов для окончательной обработки изделий
исследовались во многих странах. Основная трудность здесь состоит в том,
что роботы не обладают естественной для человека способностью
контролировать качество своей работы, робот не может менять
последовательность своих действий, если он не снабжен соответствующими
датчиками. Английская фирма, специализирующаяся на изготовлении
соединительных элементов водопроводных труб, осуществила проект, который
позволил оснастить робот простейшей системой машинного“ зрения в виде
телевизионной камеры. Предположим, робот держит какую-то деталь, например
латунный водопроводный кран; телекамера передает изображение крана в
компьютер, который в свою очередь регулирует прижатие шлифовального ремня,
стачивающего неровности на поверхности этой литой детали. Кроме того,
компьютер управляет перемещением манипулятора робота. Таким образом,
действия всех компонентов системы - телекамеры, основного манипулятора,
регулирующего прижатие шлифовального ремня,-взаимно скоординированны.
2.5 Испытания и контроль
После того как изготовлена деталь или смонтировано несколько узлов,
обычно проводится их испытание с целью выявления возможных дефектов.
Тщательному контролю подвергаются линейные размеры деталей . Все
измерительные операции являются частью повседневных задач , решаемых на
всех предприятиях мира . Роботы способны облегчить их выполнение . Для этой
цели роботы оснащаются миниатюрными оптическими датчиками ; как правило,
это светодиоды, обьединенные с полупроводниковыми светочувствительными
приборами. Облучая проверяемую поверхность лучом определенной частоты,
подобный датчик принимает отраженное от поверхности излучение, имеющее туже
частоту. Робот, в соответствии с заложенной в нем программой, перемещает
датчик от одной точки контролируемого изделия к другой. по результатам
измерения интервала времени между моментом испускания светового импульса и
его приема после отражения рассчитывается форма проверяемой поверхности.
Все эти действия выполняет компьютер данной автоматизированной системы.
Операции подобного рода позволяют избежать использование таких
инструментов, как микрометры и штангенциркули. Подобные робототехнические
средства впервые использовала компания “Дженерал моторс” для контроля формы
и размеров автомобильных деталей. При использовании такой роботизированной
ситемы отпадает необходимость в отправке изделий на специальные пункты
контроля качества - соответствующие процедуры можно осуществлять
непосредственно на конвеере , не прерывая производственного процесса.
2.6 Сборка
Большой объем работ на современных предприятий приходится на
сборочные операции, однако многие из них требуют особо мастерства и слишком
сложны для машины. В связи с этим значительная часть сборки до сих пор
выполняется вручную . Тем не менее ряд сборочных процессов уже
автоматизирован ; это относится главным образом к относительно простым и
многократно повторяющимся операциям .
На примере фирмы IBM можно проследить, как проходили эксперименты по
применению роботов в сборочных процессах. Эта крупнейшая фирма по
производству компьтеров не только продает роботы, предназначенные для
сборки, но и использует их на собственных предприятиях во многих странах.
На заводе этой компании в Гриноке (Шотландия) занимаются созданием
“островков автоматизации” - комплексов, содержащих большое количество
компьютеризированных механизмов, которыми производят сборку изделий при
минимальном участии человека . По оценке специалистов фирмы IBM , в
результате автоматизации ежегодный объем продукции предприятия вырос в 10
раз по сравнению с 1974 годом, тогда как число работающих на нем осталось
практически неизменным.
Один из таких “остравков” представляет собой производственную линию,
на которой изготавливаются логические блоки с силовыми каскадами. Линия
включает процессоры и источники питания для дисплеев, входящих в состав
микрокомпьтеров. На линии производится сборка четырех компонентов: Двух
частей пластмассового корпуса устройства, блока электрических цепей и
пластмассовой платы со смонтированным на ней набором микросхем.
Для монтажа каждого блока трабуется всего два винта, которые подаются
в рабочие органы роботов специальными механизмами - питателями. Роботы сами
вводят винты в соответствующие отверстия изделия. Для управления всей
производственной линией достаточно пяти человек. По данным фирмы IBM, для
изготовления такого же количества устройств традиционными методами ручной
сборки потребовалось бы вчетверо больше рабочих.
Проявляется тенденция к созданию связей , в рамках предприятия , между
системами автоматической сборки подобных описанной выше. Например с помощью
автоматических транспортых средств , которые перемещают изделия ,
находящихся на тех или иных стадиях готовности.
2.7 Монтаж печатных плат
Еще одна отрасль производства, где роботы-сборщики могли бы найти
широкое применение монтаж электронных компонентов на печатных платах.
Некоторые из таких операций могут выполнять специализированные сборочные
комплексы, однако, по существу , они представляют собой манипуляторы,
рассчитанные на решение строго определенных задач; их нельзя
запрограммировать таким образом , чтобы они выполняли какие-то другие
операции или манипулировали нестандартными компонентами. Поэтому при
использовании подобных установок предназначенных для
узкоспециализированного монтажа комплекты компонентов стандартной формы
загружаются в накопительные желоба многоячеечных магазинов, похожих на
патронташ. Эти магазины перемещаются мимо механического захвата, который
поочередно извлекает оттуда компоненты и устанавливает их в нужные места на
плате.
Заключение
Как показал опыт внедрения робототехника, является новой формой
технической и организационной ячейки, наиболее полно отвечающей
потребностям современного производства. Робототехника — гибкая, экономная и
рациональная форма обработки деталей и изделий более высокой стоимости и
лучшего качества средними и малыми сериями. Робототехника реализует
стремление к снижению напряженности человека в работе, связанной с
необходимостью приноравливаться к циклу машины, приводит к замене
конвейерных линий сборочными бригадами, в основу управления которыми
положен бригадный подряд.
Список использованной литературы
1. Шахинпур М. Курс робототехники: Пер. с англ. – М.; Мир, 1990.
527 с., ил.
2. Попов Е.П., Письменный Г.В. Основы робототехники: Введение в
специальность: Учеб. для вузов по спец. “Роботехнические системы и
комплексы” – М.: Высш. шк., 1990. – 224 с., ил.
3. Кочтюк В.И., Гавриш А.П., Карлов А.Г. Промышленные роботы:
Коеструирование, управление, эксплуатация: Вища. шк. Головне
издательство, 1985.
4. Фу К., Гансалес Ф., Лик К. Робототехника: Перевод с англ. – М. Мир;
1989. – 624., ил.
5. Бабич А.В., Баранов А.Г., Калабин И.В. и др. Промышленная
робототехника: Под редакцией Шифрина Я.А. – М.: Машиностроение, 1982 –
415 с., ил.
www.studmed.ru
Реферат - Промышленная робототехника - Техника
Содержание:
Введение………………………………………………………………………3
1. Основные сведения оробототехнике……………………………………….6
2. Основные задачи……………………………………………………………..11
2.1 Манипуляции изделиями изаготовками………………………………….11
<span Times New Roman",«serif»;mso-ansi-language:RU;font-weight:normal; font-style:normal">2.1.1 Загрузочно-разгрузочные работы……………………………………11
2.1.2 Перенос изделий содной производственной установки на другую.12
<span Times New Roman",«serif»;mso-ansi-language:RU;font-weight:normal; font-style:normal">2.1.3 Упаковка……………………………………………………………….13
2.1.4 Погрузка тяжелыхпредметов на конвейер или паллеты……………14
<span Times New Roman",«serif»;mso-ansi-language:RU;font-weight: normal;text-decoration:none;text-underline:none">2.2 Обработка деталей изаготовок……………………………………………..15
<span Times New Roman",«serif»;mso-ansi-language:RU;font-weight:normal; font-style:normal">2.2.1 Сварка…………………………………………………………………..15
<span Times New Roman",«serif»;mso-ansi-language:RU;font-weight:normal; font-style:normal">2.2.2 Обработка резаньем……………………………………………………17
2.2.2.1Сверление………………………………………………………17
2.2.2.2 Бесконтактная обработка заготовок…………………………18
2.3 Нанесение различныхсоставов на поверхность…………………………...20
2.4 Чистовая обработка…………………………………………………………..21
2.5 Испытания иконтроль……………………………………………………….22
2.6Сборка…………………………………………………………………………23
<span Times New Roman",«serif»;mso-ansi-language:RU;font-style:normal">2.7 Монтажпечатных плат………………………………………………………25
Заключение…………………………………………………………………...26
Список использованнойлитературы………………………………………..27
Введение
Промышленная робототехника является одним из новыхнаправлений автоматизации производственных процессов, начало развития,которого в нашей стране относится к последнему десятилетию. Комплексный подход к решению технико-экономическихи социальных задач, связанных с внедрением их промышленныхроботов (ПР), позволил высвободить около 2000 рабочих. В процессе создания, производства и внедрения ПР приходилосьсталкиваться •с решением ряда сложныхнаучно-технических проблем. Получен большой, опыт по разработкеробототехнических комплексов (РТК) и организации автоматизированногопроизводства на базе ПР. Все эти вопросы, получившие отражение в предлагаемой книге,представляют, по нашему мнению,значительный интерес как для широкого круга специалистов, конструкторов и производственников различных отраслей, которые заняты в настоящее время работой по увеличениюпроизводства и широкому применению ПР во всех отраслях народного хозяйства, так и для всех специалистов,работающих в области автомати- зациипроизводственных процессов.
Современный этап научно-технической революции характеризуется комплекснойавтоматизацией производства на базе систем машин—автоматов. До недавних пор восновном применяли специализированные автоматы и автоматические линии, незаменимыев массовом производстве, но нерентабельные в условиях серийного имелкосерийного производства из-за высокой стоимости, а также длительностиразработки, внедрения и перена-ладки их на новую продукцию. Традиционноеуправляемое вручную оборудование обеспечивает достаточную гибкостьпроизводства, но требует примене-ния квалифицированного труда рабочих и имеетнизкую производительность.
За последние десятилетия автоматизация основных технологических операций(формообразование и изменение физических свойств деталей) достигла такогоуровня, что вспомогательные операции, связанные с транспортировкой искладированием деталей, разгрузкой и загрузкой технологического оборудования,выполняемых вручную либо с помощью существующих средств механизации иавтоматизации, являются тормозом как в повышении производительности труда, таки в дальнейшем совер-шенствовании технологии. Обычными методами с помощьюсуществующих технических средств невозможно автоматизировать сборочные,сварочные, окрасочные и многие другие операции. Все это привело к острымпротиво-речиям между совершенством промышленной техники и характером труда приее использовании, потребностью в трудовых ресурсах и их фактическим наличием,требованиями интенсификации производственных процессов и ограниченнымипсихофизиологическими возможностями человека. Эти причины социального,экономического и технического характера, ставшие основными сдерживающимифакторами в развитии производства и даль-нейшем повышении производительноститруда, а также современные достижения в создании орудий производства, вычислительнойтехники и электроники привели к бурному развитию робототехники — отрасли,создавшей и производящей новую разновидность автоматических машин — промышленныероботы. По замыслу разработчиков эти машины предназ-начены для замены человекана опасных для здоровья, физически тяжелых и утомительно однообразных ручныхработах. Свое название они получили благодаря реализованной в них идеимоделирования двигательных, управ-ляющих и, в некоторой степени,приспособительных функций рабочих, занятых на повторяющихся трудовых операцияхпо разгрузке-загрузке технологического оборудования, управлению работой этогооборудования, межоперационному перемещению и складированию деталей, а также наразличных сборочных, сварочных, окрасочных и других операциях, выполняемых сприменением переносных орудий труда.
Промышленные роботы (ПР) оказались тем недостающимзвеном, появление которого позволило решать задачи комплексной автоматизациина более высоком уровне, объединяя средства производства предприятия в единыйавтоматизированный комплекс.
1. Основные сведения о робототехнике
Ближайшими по назначению прототипами для ПР послужили автоопе-раторы имеханические руки, уже давно применяющиеся в промышленности, но неудовлетворяющие производственников по причинам их узкой специализации, плохойпереналаживаемости, небольшого числа выполняемых функций и ограниченной(массовым и крупносерийным производством) области применения. Недостатки,присущие этим прототипам, в конструкциях ПР были в значительной степениустранены посредством увеличения их манипуляционных возможностей, снабжениясобственной системой привода и системой программного управления. Благодаряэтому созданные устройства приобрели качественно новые свойства: автономность всмысле невстроенности в технологическое оборудование и способность работатьавтоматически по заданной программе; универсальность, т. е. способностьперемещать в пространстве объекты различного типа по сложным пространственнымтраекториям, сопрягаемость с достаточно большим количеством типовтехнологического оборудования и хорошую переналаживаемость на различныесменяющиеся виды работ.
В настоящее время под роботом понимают автоматический манипуля-тор спрограммным управлением. В зависимости от участия человека в про-цессахуправления роботами их подразделяют на биотехнические и авто-номные, илиавтоматические.
К биотехническим роботам относятся дистанционно управляемые копирующиероботы; экзоскелетоны; роботы, управляемые человеком с пульта управления;полуавтоматические роботы.
Дистанционно управляемые копирующие роботы снабжены задающим органом(например, манипулятором, полностью идентичным исполнитель-ному), средствамипередачи сигналов прямой и обратной связи и средствами отображения информациидля человека-оператора о среде, в которой функ-ционирует робот.
Экзоскелетоны выполняются в виде антропоморфных конструкций, обычно«надеваемых» на руки, ноги или корпус человека. Они служат для воспроизведениядвижений человека с некоторыми необходимыми усилиями и имеют иногда несколькодесятков степеней подвижности.
Роботы, управляемые человеком с пульта управления, снабжаются системойрукояток, клавиш или кнопок, связанных с исполнительными механизмами каналовуправления по различным обобщенным координатам. На пульте управленияустанавливают средства отображения информации о среде функционирования робота,поступающей к человеку по радиоканалу связи.
Полуавтоматический робот характерен сочетанием ручного и автомати-ческогоуправления. Он снабжен супервизорным управлением для вмешательства человека впроцесс автономного функционирования робота путем сообщения ему дополнительнойинформации с помощью указания цели, последовательности действий и т. п.
Роботы с автономным или автоматическим управлением обычно подразделяют напроизводственные и научно-исследовательские роботы, которые после создания иналадки в принципе могут функционировать без участия человека.
По областям применения производственные роботы подразделяют напромышленные, сельскохозяйственные, транспортные, строительные, бытовые и т. п.
За короткий период развития роботов произошли большие изменения вэлементной базе, структуре, функциях и характере их использования. Это привелок делению роботов на поколения.
Роботы первого поколения (программные роботы) имеют жесткую программудействий и характеризуются наличием элементарной обратной связи с окружающейсредой, что вызывает определенные ограничения в их применении.
Роботы второго поколения (очувствленные роботы) обладают коор-динациейдвижений с восприятием. Они пригодны для малоквалифици-рованного труда приизготовлении изделий. Программа движений робота требует для своей реализацииуправляющей ЭВМ.
Неотъемлемая часть роботов второго поколения — алгоритмическое ипрограммное обеспечение, предназначенное для обработки сенсорной информации ивыработки управляющих воздействий.
Роботы третьего поколения относятся к роботам с искусственным интеллектом.Они создают условия для полной замены человека в области квалифицированноготруда, обладают способностью к обучению и адаптации в процессе решенияпроизводственных задач. Эти роботы способны понимать язык и вести диалог с человеком,формировать в себе модель внешней среды с той или иной степенью детализации,распознавать и анализировать сложные ситуации, формировать понятия, планироватьповедение, строить програм-мные движения исполнительной системы и осуществлятьих надежную отработку.
Появление роботов различных поколений не означает, что они последовательноприходят на смену друг другу. В процессе развития совершенствуютсяфункциональные возможности и технические характеристики роботов различныхпоколений.
К роботам первого поколения относят обычно промышленные роботы. Поколичеству внедренных ПР наша страна занимает одно из ведущих мест в мире.
Блок-схема ПР представляет собой сложную конструкцию (рис.1), включающуюряд систем: механическую, приводов управления, связи с оператором, информационную,а также операционное устройство.
<img src="/cache/referats/13324/image002.jpg" align=«left» hspace=«12» v:shapes="_x0000_s1026">
Рисунок 1- Блок-схема промышленногоробота.
Механическую систему выполняют, как правило, в виде манипулятора, имеющегонесколько степеней подвижности, укрепленного на неподвижном или подвижном
основании; онаобеспечивает перемещение рабочего органа с определенным грузом. Форма игабаритные размеры манипулятора определяются видом и особенностямитехнологического процесса, для которого он предназначен. Созданные модели ПРпредставляют собой по существу многокоординатные манипуляторы с программнымуправлением, программируемые по первому циклу. Их системы управления помимоосновных функций по управлению движением рабочих органов манипулятораобеспечивают выдачу сигналов на обслуживаемое оборудование, прием сигналов отпростейших датчиков внешней информации, работающих по принципу Да—Нет, ииспользование этих сигналов в целях выбора той или иной подпрограммы работы изчисла заданных оператором. Наличие внешнего контура управления существеннорасширило области применения созданных ПР, так как позволило использовать их поотношению к автоматизированному процессу не только в качестве универсальныхманипулирующих, но также и в качестве управляющих устройств. Наличие датчикови соответствующих электронных схем внешней информации придало этим ПРпринципиально новую способность адаптации к изменяющимся условиям работы.
Привод для каждой из координат ПР обеспечивает силовое воздействие насоответствующий механизм, осуществляющий задаваемое перемещение. Приводомслужит автоматическая система, входным сигналом которой являетсядетерминированное воздействие управляющей системы, а выходным сигналом —механическое перемещение.
Разработка типажа ПР, имеющего существенноезначение для организации их производства, проведения научно-исследовательскихи опытно-конструкторских работ еще не закончена. В настоящее время наиболееразработан типаж ПР первого поколения. Так, например, в станкостроительной иинструментальной промышленности по структуре типаж этих ПР подразделяют на следующиегруппы и подгруппы: универсальные ПР, обслуживающие различное технологическоеоборудование и выполняющие различные основные технологические операции; целевыеПР подъемно-транспортной группы (многоцелевые), обслуживающие различное технологическоеоборудование, выполняющие транс-портно-складские и специальные работы; целевыеПР производственной группы (многоцелевые) для выполнения различных технологическихопераций сварки, очистки и подготовки деталей, окраски и нанесения покрытий,разборки, контроля, измерения, отбраковки, разметки и сборки.
2.Основные задачи
Рассмотрим конкретные задачи, которые роботырешают в настоящее время на промышленных предприятиях. Их можно разделить натри основных категории:
— манипуляции заготовками и изделиями
— обработка с помощью различных инструментов
-сборка.
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">2.1 Манипуляцииизделиями и заготовками
При разгрузочно-загрузочных и транспортныхоперациях робот заменяет пару человеческих рук. В его обязанности не входятособенно сложные процедуры .Он всеголишь многократно повторяет одну и туже операцию в соответствии с заложенной внем (роботе) программой. Рассмотрим типичные применения таких роботов .
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.1.1 Загрузочно-разгрузочные работы
Во многих отраслях машиностроительной промышленности используются установкидля литья, резки и ковки. В большинстве случаев последовательность выполняемыхими операций весьма проста. Вначале заготовки загружают в производственнуюустановку, которая затем обрабатывает их строго определенным образом, и,наконец, готовые детали извлекают из нее. Загрузку и разгрузку, как правило,выполняют рабочие или в тех случаях, когда применимы средства жесткойавтоматизации, специализированные механизмы, рассчитанные на операции толькоодного вида. Роботы могут здесь оказаться полезными, если характер такихзагрузочно-разгрузочных операций время от времени меняется.
Например, в литейномпроизводстве роботы используются как для дозированной разливки расплавленногоалюминия, так и для извлечения из пресс-формы затвердевших отливок иохлажденияих. Такой подход обладает двумя преимуществами. прежде всего роботыгарантируют более строгое соблюдение требований технологического процесса:действую и соответствии с заданной программой, они всегда вводят в установкуточно дозированное количество металла. Затем в строго определенные моменетывремени они извлекают из нее отформованные детали. Благодоря точному соблюдению технологического процесса строгособлюдаются и характеристики изделий .
Второе преимущество данногоподхода заключается в том, что значительно облегчается работа оператора.Извлечение раскаленного куска металла из пресс-формы одна из малопривлекательных работ, и желательно, чтобы ее выполнял робот. Таким образомроль человека сводится к контролю за протеканием процесса и управлениюдействиями робота с помощью компьютера.
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.1.2 Перенос изделий с однойпроизводственной установки на другую
Во многих отрасляхмашиностроительной промышленности погрузочно-разгрузочные механизмыпредназначены для перемещения изделий с одного производственного участка надругой. И при выполнение таких перемещений роботы играют немаловажную роль.
На заводе фирмы IBM в Пикипси (шт. Нью-Йорк), выпускающем компьютеры,роботы загружает магнитные диски в систему, где на них записывается необходимаяинформация. Программа, управляющая роботом, содержит инструкции относительнотого, в какую из четырех установок для записи следует загружать тот или иной“пустой” диск. Кроме того, программа задает конкретный набор команд, которыйсоответствующая установка должна занести на диск. Тот же робот осуществляет идва других этапа этого технологического процесса. Он извлекает диск иззаписывающей установки и помещает его в устройство, которое струей сжатоговоздуха прижимает к поверхности диска самосклеивающуюся метку. Затем роботвынимает диск с помощью захватного приспособления и упаковывает его конверт.
Подобный робот разработан ивнедрен на английском автомобилестроительном заводе. Он передвигается нагусеницах между пятью производственными участками завода. Робот извлекаетпластмассовую деталь автомобиля из установки для инжекторного пресования ипоследовательно переносит деталь на доводочные участки, где с нее снимаютсяоблои и заусенцы. Далее робот помещает деталь на специализированный станок,который полирует ее. И наконец деталь перемещается с полировального станка наконвеер.
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.1.3 Упаковка
Практически все бытовые ипромышленные товары необходимо упаковывать, и для роботов не представляетсложности поднимать готовые изделия и помещать в какую-либо тару.
На заводах одной изкондитерских фирм Англии специализированные роботы занимаются укладкой конфет вкоробки. Эти машины весьма сложны и совершенны. Во-первых они обращаются спродукцией очень аккуратно: сжав шоколадное изделие, они могут нарушить егоформу или раздавить его. Во-вторых, робот соблюдает высокую точность приукладке конфет в коробки, помещая их в определенные ячейки коробки.
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.1.4 Погрузка тяжелых предметов наконвейер или паллеты
Помимо упаковки миниатюрныхизделий, а также промышленных и бытовых товаров роботы иногда выполняют ипогрузку тяжелых предметов. По существу они здесь заменяютподъемно-транспортные машины, управляемые оператором-человеком.
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">2.2 Обработкадеталей и заготовок
Хотя роботы, выполняющиеобработку изделий с помощью различных инструментов и нашли пока менее широкоеприменение, чем аналогичное оборудование для транспортировки деталей изаготовок, они про-демонстрировали свою эффективность при решении многих задач.
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.2.1 Сварка
Эта операция чаще всеговыполняется с помощью роботов, предназначенных для манипулированияинструментом. роботы могут осуществлять два вида сварки: точечную контактнуюи дуговую. В обоих случаях робот удерживает сварочный пистолет, которыйпропускает ток через две соединяемые металлические детали.
В соответствии с управляющейпрограммой сварочный пистолет может перемещатся практически не отклоняясь отзаданной траектории. И если программа отлаженна хорошо, сварочный пистолетпрокладывает шов с очень высокой точностью .
Большинство роботов дляточечной сварки применяется в автомобильной промышленнсти. При сборкеавтомобиля необходимо выполнить огромное количество операций точечной сварки,чтобы надлежащим образом соединить между собой различные детали кузова,например боковины, крышу и капот. На современных конвейерах эти детали вначалесоединяются временно несколькими прихваточными сварными соединениями. Далеекузов перемещается по конвейеру мимо группы роботов, каждый из которыхосуществляет сварку встрого определенных местах. Поскольку все кузова,монтируемые на одной производственной линии, для получения высококачественныхсоединений просто требуется, чтобы робот каждый раз повторял заданнуюпоследовательность перемещений .
При очевидных преимуществахтакого использования роботов существует ряд и серьезных технических проблем.Запрограммировать робот весьма непросто. Необходимо не только задать точныймаршрут движения манипулятора, но и подготовить инструкции, в соответствии скоторыми регулируется напряжение и сила тока в каждой точке маршрута. А этипараметры могут меняться, например, в зависимости от толщины свариваемогоматериала или от того, какую форму имеет прокладываемый шов — прямую иликриволинейную.
Также необходимосконструировать фиксаторы, удерживающие детали в процессе сварки такимобразом, чтобы сварка осуществлялась при высокой точности позиционирования.Когда сварочный пистолет держит человек, он способен учитывать незначетельныесмещения заготовки. Сварщик-человеку лишь слегка сместит инструмент, с темчтобы выполнить шов в заданном месте. Робот же не способен принимать подобныерешения, если фиксаторы допускают перекос или смещение, то существуетвероятность того, что сварные швы будут расположенны с отклонением. Кроме того,фиксатор должен быть таким, чтобы манипулятор имел доступ к детали с разныхсторон.
Следующая проблема касаетсядопусков на изготавливаемые детали. Сварщик-человек принимает во вниманиенеизбежные отклонения в размерах, но роботу подобная коррекция не под силу.Таким образом, когда сварка осуществляется с помощью автоматики, допуски надетали, изготавливаемые на других участках предприятия, должны бытьминимальными.
Характер воздействия, котороероботы оказывают на другие этапы производственного процесса (весьма вероятно,что оно приведет к тесной привязке всех технологических операций ), называется“принципом домино” в робототехнике.
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.2.2 Обработка резаньем
<span Times New Roman",«serif»;mso-ansi-language:RU;font-style:normal">2.2.2.1Сверление
Как правило операцию сверления осуществляют настанке. При использовании робота в его захватном приспособлении закрепляетсярабочий инструмент, который перемещается над поверхностью обрабатываемойдетали, высверливая отверстия в нужных местах. Преимущество подобнойпроцедуры проявляется в тех случаях, когда приходится работать скрупногабаритными и массивными деталями или проделывать большое числоотверстий.
Операции сверления играютзначительную роль в производстве самолетов: они предшествуют клепке, прикоторой в отверстия вставляются миниатюрные зажимные детали, скрепляющие междусобой два листа металла. В деталях самолетов необходимо проделывать сотни, а тои тысячи отверстий под заклепки, и вполне естественно, что такую операциюпоручили роботу .
Английская компанияизготавливает детали механизма бомбосбрасывания, предназначенного дляистребителя “Торнадо”. Механизмпредставляет собой цилиндрическую конструкцию длиной примерно 6м, к которойтребуется приклепать кожух из восьми металлических панелей. В кожухе необходимопросверлить около 3000 отверстий под заклепки. Проблема заключалась в том, какдобиться, чтобы робот, оснащенный высокоскоростной сверлильной головкой,проделывал отверстия точно в заданных местах .
Инженеры пришли к выводу, чтоданную проблему можно решить следующим образом: рабочий просверливает рядэталонных отверстий (примерно через метр друг от друга) вдоль панелей, которыеразмещаются надлежащтм образом поверх цилиндрической конструкции. Манипуляторс закрепленным в его зажиме сенсорным зондом (а не сверлом) перемещается надповерхностью заготовки, посылая в память робота данные о местонахожденииэталонных отверстий. Затем робот расчитывает точные координаты остальныхотверстий, исходя из этих базовых точек. Затем робот, завершив операциюсверления, удаляет оставшиеся в отверстиях крошечные частицы металласпециальным инструментом.
<span Times New Roman",«serif»;mso-ansi-language:RU;font-style:normal">2.2.2.2 Бесконтактная обработка заготовок
Из-за малой жесткости и недостаточной твердости,роботы не могут проводить обработку твердых материалов резаньем. Поэтомуинженеры изучают бесконтактные методы обработки материалов, подобных металлуили пластику. Для этой цели, в частности, используется лазер. В рабочем органеробота закреплен прибор, который направляет высокоэнергетическое когерентноеизлучение лазера (для чего нередко используется волокно-оптическая системапередачи) на обрабатываемую заготовку. Лазер может с высокой точностью резатьпластины из металла, в частности стали. Робот перемещает рабочий орган надобрабатываемым листовым материалом по траектории, определяемой программой.Программой же регулируется интенсивность светового луча в соответствии столщиной нарезаемого материала .
Другой бесконтактный методрезанья основан на использовании струи жидкости. Такой подход впервые применилакомпания “Дженерал моторс”. На ее заводе в Адриане установлена система с 10роботами, изготавливающая пластмассовые детали нефтеналивных цистерн. Восемь издесяти роботов напрявляют водяные струи под высоким давлением на перемещаемыеконвеером пластмассовые листы. Эти струи прорезают в исходном материале рядотверстий и щелей, а также удаляют лишние элементы пластмассовых прессованыхдеталей. по утверждению представителей компании “Дженерал моторс”, подобнаяроботизированная система весьма экономична, поскольку исключает износинструмента и позволяет повысить качество операций резанья. Поскольку системауправляется программой, которая находится в памяти центрального компьютера, дляконтроля и обслуживания всех 10 роботов требуется только два оператора.
2.3Нанесение различных составов на поверхность
На большенстве предприятийпосле таких операций, как резанье, производится обработка поверхности толькочто изготовленных деталей (чаще всего окраска). Это еще один типпроизводственных операций, которые способен выполнять робот если его оснаститьпульверизатором. В память робота закладывается программа, обеспечивающаявыполнение определенной, многократно повторяемой последовательностиперемещений. Одновременно программа регулирует скорость разбрызгивания краски.В результате на поверхности окрашиваемой детали образуется равномерноепокрытие, причем нередко робот обеспечивает более высокое качество окраски, чемчеловек, которому свойственна неточность движений. Среди других процедуробработки поверхности можно отметить напыление антикоррозийных жидкостей налисты металла для защиты их от химического или физического воздействияокружающей среды, а также нанесение клеевых составов на поверхность деталейподлежащих соединению. Автомобилестроительные компании исследовали возможностьприменения последней операции на этапе окончательной “подгонки” готовых узлов,в частности при монтаже таких элементов, как хромовые вкладыши на кузовеавтомобиля. При выполнении подобных операций робот помещают в оболочку, котораязащищает его от попадания клея и других связующих веществ. Его также можно“обучить” тому, чтобы он время от времени самостоятельно очищался, погружаязахватное приспособление в очищающую жидкость.
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.4 Чистовая обработка
Самой “непопулярной”операцией в механообработке, которая к тому же труднее потдаетсяавтоматизации, является, пожалуй, удаление заусенцев, посторонних частиц изачистка.
Такая чистоваяобработка-весьма непростая процедура. Рабочий подносит обрабатываемую деталь кабразивному инструменту, который стачивает острые края и шероховатости наповерхности изделия. Данная процедура занимает важное место в технологическомпроцессе, однако выполнять ее вручную весьма непросто.
Возможности использованияроботов для окончательной обработки изделий исследовались во многих странах.Основная трудность здесь состоит в том, что роботы не обладают естественной длячеловека способностью контролировать качество своей работы, робот не можетменять последовательность своих действий, если он не снабжен соответствующимидатчиками. Английская фирма, специализирующаяся на изготовлении соединительныхэлементов водопроводных труб, осуществила проект, который позволил оснаститьробот простейшей системой машинного“ зрения в виде телевизионной камеры.Предположим, робот держит какую-то деталь, например латунный водопроводныйкран; телекамера передает изображение крана в компьютер, который в свою очередьрегулирует прижатие шлифовального ремня, стачивающего неровности на поверхностиэтой литой детали. Кроме того, компьютер управляет перемещением манипулятораробота. Таким образом, действия всех компонентов системы — телекамеры,основного манипулятора, регулирующего прижатие шлифовального ремня,-взаимноскоординированны.
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»; mso-ansi-language:RU;font-style:normal">2.5 Испытания и контроль
После того как изготовленадеталь или смонтировано несколько узлов, обычно проводится их испытание с цельювыявления возможных дефектов. Тщательному контролю подвергаются линейныеразмеры деталей. Все измерительные операции являются частью повседневных задач, решаемых на всех предприятиях мира. Роботы способны облегчить их выполнение. Для этой цели роботы оснащаются миниатюрными оптическими датчиками; какправило, это светодиоды, обьединенные с полупроводниковыми светочувствительнымиприборами. Облучая проверяемую поверхность лучом определенной частоты, подобныйдатчик принимает отраженное от поверхности излучение, имеющее туже частоту.Робот, в соответствии с заложенной в нем программой, перемещает датчик от однойточки контролируемого изделия к другой. по результатам измерения интервалавремени между моментом испускания светового импульса и его приема послеотражения рассчитывается форма проверяемой поверхности. Все эти действиявыполняет компьютер данной автоматизированной системы.
Операции подобного родапозволяют избежать использование таких инструментов, как микрометры иштангенциркули. Подобные робототехнические средства впервые использовалакомпания “Дженерал моторс” для контроля формы и размеров автомобильных деталей.При использовании такой роботизированной ситемы отпадает необходимость в отправкеизделий на специальные пункты контроля качества — соответствующие процедурыможно осуществлять непосредственно на конвеере, не прерывая производственногопроцесса.
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»;mso-ansi-language:RU">
<span Times New Roman",«serif»; mso-ansi-language:RU;text-decoration:none;text-underline:none">2.6 Сборка
www.ronl.ru
Доклад на районном по теме "Введение робототехники в образовательный процесс"
Муниципальное казенное общеобразовательное учреждение
«Средняя общеобразовательная школа №2» с.п. Чегем Второй
Доклад
Алакаева Юрия Хажмуратовича
на районном семинаре
учителей информатики и физики
по теме «Введение робототехники в образовательный процесс»
февраль 2015г
Робототехника- это прикладная наука, занимающаяся разработкой автоматизированных технических систем. Она является одним из важнейших направлений научно-технического прогресса, в котором проблемы механики и новых технологий соприкасаются с проблемами искусственного интеллекта.
Роботостроение - развитая отрасль промышленности: несколько тысяч роботов работают на различных предприятиях, робототехнические манипуляторы превратились в неотъемлемую часть подводных исследовательских аппаратов, изучение космического пространства уже не обходиться без использования роботов с высоким уровнем интеллекта.
Высока научная активность в области робототехники: каждый год проводится несколько международных конференций по роботам, организуются национальные научно-технические совещания. Все большее число технических специалистов начинает заниматься роботами. Робот бытового назначения быстро выходит из стен лабораторий. В мире насчитывается около тысячи предприятий, производящих подобные устройства. Появляется все больше роботов заменяющих человека на рабочем месте.
Специалисты, обладающие знаниями в этой области, сильно востребованы, поэтому вопрос внедрения робототехники в образовательный процесс очень актуален. Если ребенок интересуется данной сферой с младшего возраста, он может открыть для себя очень много интересного. Поэтому, внедрение робототехники в учебный процесс и внеурочное время приобретают все большую значимость.
Играть в конструкторы и собирать трансформеров скоро можно будет прямо на уроке. В российских школах уже со следующего года может появиться новый предмет - робототехника.
Настоящий робот не просто выполняет команды человека, он способен самостоятельно справиться с задачей. Это только на первый взгляд, кажется, что машина случайно сбивает железные банки, совсем нет. Робот точно определяет, где они находятся. Помогают ему специальные датчики.
Конечно, пока эти школьные роботы выполняют простые задачи. Но они уже способны, например, передвигаться по строго заданной траектории, а также замечать препятствия. "Если взять даже роботов, которых собирают для соревнований, они могут выполнять совершенно конкретные цели: это и расчистка территории, и перемещение грузов, отслеживание перемещений. Если использовать датчики более расширенные, то можно оценивать уровень шума, освещения, загрязнений. Пока робототехника - всего лишь внеклассные занятия, но уже со следующего года этот предмет займет свое место в обычном школьном расписании.
Новый предмет, конечно, будут изучать не все школьники, а только те, кто всерьез увлекается физикой, математикой или информатикой. Но при этом специальной техникой должны быть оборудованы классы. Ввести спецкурс в школьную программу было решено во время прошедшей недавно в Сочи Международной олимпиады по робототехнике. Здесь министр образования Российской Федерации Дмитрий Ливанов заявил, что, уже со следующего учебного года курс робототехники может войти в школьную программу российских школ в рамках предмета «технология». Правда, сразу это будет сделано не во всех школах. Сначала нужно подготовить преподавателей, да и самих учеников.
"Несмотря на то, что робототехника уже достаточно прочно вошла в нашу жизнь, в образовательную часть она вошла еще не так мощно. И преподавать эти программы, создавать эти программы, на мой взгляд, нужно еще с дошкольного возраста. Надо создавать с того момента, когда ребенку это становится интересно. Изучать робототехнику планируют с начальной школы. Сначала это будут обычные конструкторы, которые должны развивать у малышей навыки командной работы и пространственное мышление. Хотя у ребят в руках пока детский конструктор, мечты уже вполне серьезные.
"Робот нужен для того, чтобы помогать человеку, делать опасную для него работу и переносить разные тяжелые предметы", - считают дети.
Говорят, что у всех машин будут одинаковые технические характеристики, а вот их интеллектуальные способности полностью зависят от фантазии и умелых рук школьников.
Занимательная робототехника – образовательный и просветительский проект. Наша миссия – популяризация робототехники в молодежной среде – от дошкольников до студентов. Поэтому надо рассказать и показать, что робототехника и роботы – это интересно, доступно и увлекательно.
Какими средствами?
Во-первых, это новости робототехники. Надо отбирать самое интересное в ракурсе заявленной цели на новостных сайтах, каналах ведущих мировых ИТ-корпораций и организаций робототехнической сферы. Это вдохновляющие идеи и примеры того, как не ограничены способности человеческого мозга.
Во-вторых, запускают несколько обучающих курсов по робототехнике в различных форматах, рассчитанных на разную аудиторию.
В-третьих, на сайте публикуются статьи педагогической направленности, ориентированные на учителей среднего и дополнительного образования, и популярные статьи для родителей с рекомендациями по выбору кружков, покупке конструкторов и выстраиванию индивидуальных траекторий обучения детей.
В-четвертых, это информация о робототехнических мероприятиях и соревнованиях разного уровня.
В-пятых, создать удобный и актуальный каталог кружков робототехники, с возможностью поиска по различным атрибутам, отзывами и оценками пользователей.
Робототехника – это наше будущее. Завтра роботы будут делать большинство работы, все, что останется нам – создавать их. Подружитесь с роботами уже сейчас!
По мнению специалистов министерства образования, робототехника позволит в увлекательной для детей форме закреплять свои познания в целом ряде классических школьных предметов: математика и физика, инженерия и проектирование, черчение (словом, всё то, что дети будут использовать при создании учебных роботов).
«При этом очень важно дать детям представления о современной техносфере, а также предоставить возможность самим придумать, сконструировать, запрограммировать и запустить созданный своими руками механизм. Именно здесь им поможет школьная робототехника. Конечно, отнюдь не все станут инженерами или конструкторами в будущем, но каждый ребёнок должен иметь шанс попробовать».
Стоит отметить, что ряд российских регионов (Краснодарский край, Москва, Санкт-Петербург, Татарстан, Челябинская область) ранее уже включил робототехнику в свою школьную программу, но в качестве дополнительного образования детей. Теперь же чиновники хотят обобщить их опыт и сделать его доступным для других российских регионов вплоть до каждой школы. Робототехника может очень скоро стать обязательной частью школьной программы, потому, что России очень нужны новые инженеры и собственные платформы для того, чтобы создавать конкурентоспособные технологии, говорят эксперты.
Еще в 1942 г. Айзек Азимов сформулировал три знаменитых закона робототехники:
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинен вред.
2. Робот должен повиноваться всем приказам, которые дает человек, кроме тех случаев, когда эти приказы противоречат первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Первый тренд современной робототехники — безопасное взаимодействие с людьми. Промышленные роботы не только учатся безопасно взаимодействовать с людьми, но и делать такое взаимодействие максимально эффективным. "Проведенные исследования доказывают, что когда человек работает в продуманной оптимизированной связке, то эффективность труда такой производственной ячейки может возрасти на 80%.
"Многие научные коллективы ведут работу по созданию роботов, которые способны работать рядом с людьми. В настоящий момент в промышленной робототехнике используются роботы, которые работают в отдельных цехах, и появление людей в таких цехах опасно для жизни — работающий робот не может понять, что рядом с ним находится человек". Однако вскоре эта ситуация может в корне измениться. Робототехника может очень скоро стать обязательной частью школьной программы, потому, что России нужны новые инженеры и собственные платформы
Второй - роботизация не сокращает рабочие места, а напротив, приводит к их возникновению. Один работающий робот сегодня — это внедрение 3–4 инженеров, то есть рабочие места становятся более высокотехнологичными. "Рабочие места, которые могут быть оптимизированы при роботизации производства, никуда не исчезают. Просто создаются новые, более высокотехнологичные рабочих места. Вопрос лишь в том, в какой стране рабочие места сокращаются, а в какой, они создаются.
Третий тренд — взаимопроникновение технологий промышленной и сервисной робототехники. То, что ранее находило использование лишь в цехах заводов, теперь начинает массово применяться в других видах робототехники
Четвертый тренд - компоненты для создания роботов станут дешевле. Один из последних серьезнейших толчков к массовому развитию робототехники — вывод на рынок игровой приставки Microsoft Kinect.
Пятый тренд — отрасль промышленной робототехники достигла зрелости. Промышленная робототехника сегодня — развитая область, которая приносит многомиллиардную прибыль. Хорошим примером тут является реабилитационная робототехника. На сегодняшний день по объему продаж сервисных роботов лидирует именно медицинское направление.
Шестой тренд — растет значимость конкретных проявлений искусственного интеллекта в робототехнике. Роботы учатся лучше анализировать окружающее пространство, понимают, каких действий от них требует та или иная среда.
Седьмой тренд — темпы создания новых производств будут постоянно расти. И в недалеком будущем, мы научимся разворачивать производство на новом месте за один день.
В первую очередь российским специалистам сегодня необходимо активизировать научные публикации. Традиционно сложилась ориентация советской, а затем и российской науки на военное и космическое применение, что по определению означает закрытость и секретность. А японские военные никогда не проявляли интереса к робототехнике, и поэтому японской робототехнике пришлось научиться "добывать" деньги на исследования и разработки у промышленности, делая реально полезные для общества и экономики вещи".
Ключевым фактором для конкурентоспособности отрасли станет умение создавать собственные технологические платформы для робототехники, а не использовать зарубежные.
Именно на новое поколение российских робототехников работают соревнования WRO. Прежде всего, дети должны получить базовые навыки программирования, чтения алгоритмов, они должны уметь паять, понимать, что такое микросхемы и не бояться с ними работать. С точки зрения практических умений, уроки робототехники в рамках уроков труда были бы очень полезны. Причем это может пригодиться и мальчикам, и девочкам.
Еще одной важной инициативой помимо введения уроков робототехники в школе может стать вопрос о включении этого предмета в перечень олимпиад школьников, дающих льготы при поступлении в инженерные вузы.
infourok.ru
Реферат Робототехника, манипуляторы и их будущее
ч. 1 ГБОУ города Москвы Гимназия №1505«Московская городская педагогическая гимназия-лаборатория»
Реферат
Робототехника, манипуляторы и их будущее
Автор: ученица 9 класса «Б»
Котова Дарья
Руководитель: Ветюков Д.А.
Москва
2015Оглавление
Введение. 3Глава 1. Манипуляторы и их устройство. 5
Мобильные и манипуляционные роботы. 5
Устройство манипулятора. 6
Характеристики манипуляторов. 9
Глава 2. Манипуляторы в жизни 11
Где используются роботы и куда они движутся. 11
Заключение. 15
Список литературы. 16
Введение.
Цель моего исследования довольно нестандартна для реферата на техническую тему. Моя цель – это не только улучшить уровень знаний и разобраться в строении манипуляторов. Для меня, как и для любого подростка и ученика старших классов, очень важно и необходимо найти свое место в жизни, определиться с интересами, приоритетами и будущим. Однако выбирать из того, о чем толком ничего не знаешь, очень трудно. Также полной неизвестностью является и то, на что ты подписываешься, выбирая тот или иной профиль, факультет, место работы. Для осознания темы нужно в нее погрузиться и разобраться. Поэтому цель моего реферата – не только изучить и описать устройство манипуляторов и их составляющих, но также определить, интересна ли мне карьера физика или робототехника, насколько сложным был бы для меня этот путь. Для этого я рассмотрю основные области применения и перспективы робототехники как науки. Я не рассчитываю окончательно определиться с карьерой к концу своего исследования, но я точно смогу добавить робототехнику к списку своих вариантов будущей профессии или, напротив, исключить ее, обладая необходимой для принятия решения информацией. Но не достаточно только знать о сферах применения роботов. Также необходимо иметь представление об их классификациях и устройстве. Меня заинтересовали именно манипуляционные роботы и непосредственно манипуляторы. Это наиболее распространенный и часто используемый вид роботов.Надеюсь, что, разобравшись в принципах работы манипуляторов и познакомившись с данной областью хотя бы немного глубже, чем просто на обывательском уровне, я смогу составить обоснованное мнение о том, насколько для меня перспективно это направление с точки зрения выбора будущей профессии.
Так как метод моего исследования теоретический, то объектом моего исследования являются книги об устройстве роботов, в частности манипуляторов, как их важных частей, которые, в свою очередь - предмет моего исследования.
В список моих задач входят прочтение и анализ тематической литературы, создание иллюстраций, которые будут не только напрямую иллюстрировать реферат, но и помогут еще раз повторить и усвоить строение манипуляторов и значение связанных с ними характеристик. Но самая важная задача – это написание и структурирование текста, без которого не может существовать исследование. Написание и работа над рефератом помогают глуюже уйти в выбранную тему исследования.
Глава 1. Манипуляторы и их устройство.
Где можно встретить робота? В современном мире развитие робототехники идет полным ходом. Роботы используются везде, где это возможно: медицина, кинематограф, производство, оборона, транспорт, даже нынешние дети являются активными пользователями роботов, так как огромное количество разнообразных игрушек является их самыми настоящими представителями. То, что когда-то казалось роскошью и редкостью – сейчас обыденная составляющая жизни. Но задумывались ли вы, как они работают и к чему приведет технический прогресс? Помочь разобраться в этом поможет мое исследование.Мобильные и манипуляционные роботы.
Роботы делятся на две основные категории: мобильные и манипуляционные.Мобильный робот - автоматическая машина, в которой имеется движущееся шасси с автоматически управляемыми приводами. Мобильные роботы созданы для передвижения в пространстве, чаще всего для того, чтобы добраться в места, недоступные для человека. На данный момент роботы освоили практически все виды передвижения, встречающиеся в живой природе: ходьба (как на двух, так и на четырех ногах), плавание, летание, ползание, а некоторые даже способны ползать по стенам.
Манипуляционный робот – автоматическая машина (стационарная или передвижная), состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и устройства программного управления, которая служит для выполнения в производственном процессе двигательных и управляющих функций. Такие роботы производятся в напольном, подвесном и портальном исполнениях. Сам манипулятор - это механизм для изменения пространственного положения объектов. Значение слова «манипулятор» закрепилось за словом с середины XX века, благодаря применению сложных механизмов для работы с опасными объектами в атомной промышленности.
Очень часто инженеры создают многофункциональные машины, относящиеся к смешанной категории: они могут и передвигаться, и выполнять какие-либо действия. Такие роботы активно используются в освоении космоса. В качестве примера можно привести луно- и марсоходы. Задача этих машин не ограничивается способностью к перемещению. Им также необходимо умение брать образцы почвы, делать снимки и проводить различные эксперименты и измерения.
Так как рассмотрения всех типов роботов оказалось слишком обширной задачей для рамок моего реферата, я решила сосредоточить свое исследование более детальном изучении устройства манипуляционных роботов и посвятила ему первую главу реферата.
Составляющие робота. Согласно учебнику для высших учебных заведений, написанному С. Л. Зенкевичем – «Основы управления манипуляционными роботами» - сам Именно эта система и называется манипулятором. Давайте разберемся, из чего они непосредственно состоят.
Устройство манипулятора.
Составляющие манипулятора. Манипуляционный механизм – это система тел, предназначенная для перемещения в пространстве объектов, находящихся в схвате манипулятора.Манипулятор состоит из звеньев – несгибаемых частей, соединенных между собой шарнирами. Шарниры - части, соединяющие между собой звенья манипулятора, обеспечивая им возможность вращательного или линейное движение.
Различают несколько видов шарниров: цилиндрический, шаровой и шарнир угловых осей (см. рис. 1). Разные виды шарниров позволяют производить разные виды движения:
- цилиндрический - вокруг общей оси;
- шаровой - вокруг общей точки;
- угловых осей - с равной угловой скоростью.
Рис. 1. Шарниры; а – цилиндрический, б – шаровой, в – угловых осей
Шарнир также является примером кинематической пары в манипуляторе.
б а Кинематические пары – это два соединенных между собой звена, допускающие какое-либо относительное перемещение. Кинематические пары образуют кинематические цепи, которые бывают замкнутыми и разомкнутыми (рис.2). Замкнутой цепью называют ту, все звенья которой входят в состав как минимум двух кинематических пар. Кинематическая цепь, в которой есть звенья, входящие лишь в одну пару, называется разомкнутой.
Рис. 2. Кинематические цепи; а – разомкнутая (открытая), б - замкнутая
Однако, вне зависимости от вида кинематической цепи, ее замыкает одно условное неподвижное звено. Один его конец неподвижно крепится к основанию робота, а его вторая половина соединена со следующим звеном, от которого идет еще одно, и так продолжается до самого «рабочего органа» манипулятора - его ключевой части.
Рабочий орган – это исполнительная система манипулятора, предназначенная для выполнения различных действий. Она может представлять собой сверло, схват, фрезу, что угодно, в зависимости от целевого назначения робота. У большинства оно предполагает изменение положения, но каждый робот имеет границы, предел возможностей. Это своеобразный контур, за пределами которого он не сможет работать, так как попросту туда не дотягивается. Пространство, находящееся внутри этого контура называется рабочей зоной манипулятора. На рисунке 3 это заштрихованная область, а линия, ограничивающая ее – траектория движения рабочего органа, когда угол между всеми звеньями равен 180◦.
Рис. 3. Рабочая зона манипулятора
Ее размер зависит от количества звеньев и их степени подвижности. Параметр рабочей зоны манипулятора определяется системой координат, в которой может передвигаться исполнительная часть манипулятора во время работы. Таким образом, это фиксированное пространство, в котором может находиться рабочий орган манипулятора во всех доступных ему положениях, как это объясняется во втором издании книги Е.И. Юревича – «Основы робототехники».
Приводы. Но никакой рабочей зоны не было бы и в помине, не будь манипулятор подвижен. Движение роботу обеспечивают специальные приводы, расположенные внутри него или, иногда, на поверхности. Базовый состав привода – двигатель и устройство управления данным приводом. Также в состав привода могут входить механизмы для передачи и преобразования движения, тормоз и муфта. Главное качество частей привода – легкость. В движение исполнительную часть и звенья приводят двигатели. Их может быть несколько и расположены они в разных местах, так как расположение двигателя определяется рациональностью его нахождения в данной части робота. Малый вес и размер – очень важный элемент в построении хорошо функционирующего робота. Это связано с необходимостью размещения данных деталей на исполнительной части робота – манипуляторе – с минимальной затратой рабочей поверхности и излишней затраты энергии на перемещение двигателей. Например, если расположить мощный, но тяжелый двигатель прямо на схвате, то в лучшем случае его грузоподъемность уменьшится, а в худшем – сам манипулятор не выдержит веса двигателя и, грубо говоря, отвалится. В зависимости от требований, предъявляемых к роботу, предъявляются требования и к приводам: стоимость, способ и качество управления, удобство эксплуатации.
Различают пневматические, гидравлические и электрические приводы. Они различаются мощностью и стоимостью, зависящей от сложности рабочего принципа.
Пневматические приводы – приводят части манипулятора в движение посредством энергии сжатого воздуха. Они дешевые и надежные, применяются в роботах с низкой грузоподъемностью. Единственная отрицательная их черта – плохая управляемость, поэтому они применяются как нерегулируемые, с цикловым управлением. Смысл роботов с цикловым управлением в том, что они раз за разом выполняет заданное программой действие, а не управляются оператором в режиме реального времени, что очень удобно в фабричном производстве.
Гидравлические приводы – работают за счет гидравлической энергии. Они схожи с пневматическими, но вместо газа в поршень поставляется жидкость. Они самые дорогие и мощные, применяются в тяжелых и супертяжелых роботах с высокой грузоподъемностью и мощностью 5000-1000 Вт. Из-за хорошей управляемости они также применяются в роботах со средней грузоподъемностью, для которых важна динамичность и точность.
Электрический привод имеет простой подвод энергии, легко и хорошо управляем, удобен в эксплуатации, но имеет худшие массогабаритные характеристики, что значит, что он имеет очень маленькую грузоподъемность и занимает много пространства, что невыгодно и неудобно при создании робота.
Характеристики манипуляторов.
Степень свободы манипулятора. Для чего бы ни был предназначен манипулятор, его пригодность для совершения какой-либо функции определяет ряд характеристик, зависящих от его строения. Параметры каждого из них варьируются в зависимости от того, какое предназначение имеет робот, потому что в каждой сфере использования важна отдельная характеристика. Одна из них уже была упомянута выше: она определяет рабочую зону. Это степень свободы манипулятора. Она представляет собой возможность манипулятора изменять положение. Например, на рисунке 4 мы видим манипулятор, имеющий 5 степеней подвижности. Это значит, что его звенья могут двигаться в 5 разных направлениях: первое и третье (считая от рабочего органа – схвата) имеют 2 степени свободы. Они могут не только двигаться по прямой, но и вращаться вокруг своей оси. Последней способности нет у второго звена, оно может изменять свое положение толко вертикально.Рис. 4. Степени свободы манипулятора
Степень подвижности манипулятора. Следующая характеристика напоминает первую названием, но отличается от нее смыслом. Любая кинематическая цепь обладает некоторым числом степеней подвижности. Эта характеристика определяет число свободы схвата манипулятора, т.е. сложность устройства рабочего органа. Для исполнения своей прямой обязанности у манипулятора должно быть не менее 6 степеней подвижности, а если их больше 6, то такую систему называют кинематической схемой с избыточностью. Увеличение степени подвижности объясняется специфическими факторами, влияющими на объект манипуляций. Например, роботу придется перемещать объект в ограниченном пространстве или по определенной траектории. Таким образом, число степеней подвижности манипулятора является одной из важнейших его характеристик.
Грузоподъемность. Однако, вне зависимости от подвижности манипулятора, каждый из них обладает своей грузоподъемностью, которая не менее, а в некоторых областях более важна при конструкции робота. Грузоподъемность показывает, насколько тяжелым грузом сможет оперировать робот, при этом не подвергая себя и манипулятор каким-либо механическим повреждениям и неполадкам. Этот параметр задается при создании робота и зависит от его размера, строения и предназначения. Для роботов разного назначения грузоподъемность разная, и может варьироваться от грамма до нескольких тонн. Манипуляторы с большой грузоподъемностью отличаются высокой мощностью двигателей и маленьким количеством прочных звеньев. Это делается с расчетом на то, что на каждое последующее звено, начиная с рабочего органа, приходится нагрузка предыдущего и вес привода. Если звеньев слишком много, а груз слишком тяжелый, то конструкция может не выдержать.
Кинематика. Внешний вид и способ, траектория движения манипулятора также могут повлиять на его работоспособность и практичность. Все это определяется понятием «кинематика». Кинематика – строение и движение робота, принцип устройства. У большинства манипуляторов кинематика антропоморфная. Это значит, что их строение напоминает строения тела человека. Так большинство манипуляторов построены по тому же принципу, что и руки человека.
Известная американская кампания Boston Dynamics уже очень долгое время работает над роботами, способными передвигаться как человек и животные. В линии Boston Dynamics есть роботы под названиями WildCat, Dog, Atlas и многие другие. Их кинематика максимально приближена к анатомии живых существ. Последний – Atlas – имеет форму человека и почти идеально приспособлен к сохранению равновесия, передвижению по неровной поверхности, ступеням, брусьям. Сейчас вносятся лишь некардинальные
изменения во внешний вид Atlas’а, работа идет над очеловечиванием внешнего вида робота. Корпус становится все более и более эстетичным и человекоподобным. Но подробнее о развитие роботов настоящем и будущем сказано во второй главе моего исследования.
Глава 2. Манипуляторы в жизни
Где используются роботы и куда они движутся.
Сферы использования роботов. Такие разработки как Atlas еще не вошли в нашу повседневную жизнь, но со стремительным развитием технологий роботы перестают быть редкостью, а без некоторых из них мы уже не представляем свою жизнь. Я рассмотрела основные схемы использования роботов, а также перспективные направления их развития. За списком перспективных направлений я обратилась к интернету. Меня заинтересовала статья на сайте tesla-tehnika.biz. В ней были перечислены такие направления, как групповая робототехника, медицинские роботы, киборги и – одно из важнейших – искусственный интеллект. Теперь подробнее о каждом.Групповая робототехника. Согласно информации с сайта, групповая робототехника – это направление, в котором разрабатываются роботы некрупного размера, взаимодействующие друг с другом и окружающей средой, а достижению цели способствует самоорганизация роботов. Они работают в команде, что и отличает их от других.
Медицинская робототехника. Роботы в медицине – очень широкая группа. В нее входят машины, используемые для проведения операций, как, например, робот Да Винчи, о котором я узнала с сайта svagor.com. На этом сайте я нашла описание робота и принцип управления им: «Роботизированная хирургическая система «Да Винчи» состоит из двух основных блоков – первых из них – операционный – оснащен тремя или четырьмя манипуляторами-инструментами. Три операционных манипулятора представляют собой универсальные держатели хирургических и электрокоагуляционных инструментов, разработанных специально для этого робота, последний манипулятор оборудован двумя эндоскопическими видеокамерами, передающими изображение на операционную консоль хирурга, т.е. во второй блок. Во время операции хирург размещается у консольного блока, отслеживая ход оперативного вмешательства через стереоскопические (3D) окуляры, управляя двумя хирургическими манипуляторами при помощи рук, правой ногой – электрокоагуляционным манипулятором, левой – манипулятором с эндоскопическими камерами.»
Однако в медицине также начинают развиваться роботы ухаживающие за больными. Они могут работать в приемной для регистрации и проведения осмотров пациентов, а также для перемещения и ухода за больными, которым это необходимо постоянно, но невозможно или очень трудно обеспечить им круглосуточный присмотр, осуществляемый медсестрой или врачом.
Киборги. Как ни странно, создание киборгов тоже можно отнести к медицине. Стереотип, пришедший в сознание большинства обывателей из кинофильмов и книг – то, что киборги – это свирепые роботы-убийцы, беспощадные машины, используемые против человечества. Однако сейчас активно ведутся разработки роботизированных протезов, частично или полностью восстанавливающих функциональность заменяемой части тела. Деревянные и пластиковые ноги и руки уже позади, теперь активно развиваются протезы, которые сложно отличить от настоящей части тела. Они подчиняются мозговым сигналам человека, которому установлены, по принципу настоящих конечностей. Также популярной идеей среди ученых и инженеров стал протез человеческого глаза, который смог бы передавать сигналы в мозг и позволять действительно видеть, а не просто избавляющий человека от внешнего дефекта.
Одной из разновидностей протезирования в скором будущем может стать экзо-скелет. Эта система сможет усиливать движения человека, увеличивая силу настоящих мышц примерно в 300 раз. Двигается девайс в точности как человек, но при этом всю работу делает за него. Оператор экзо-скелета только управляет им, двигаясь внутри. Робот понимает, куда двигаться, ссылаясь на многочисленные сенсоры на поверхности, соприкасающейся с кожей управляющего. Они считывают малейшие его шевеления и заставляют машину следовать за ними. Благодаря экзо-скелетам утомляемость снизится, так как преодолевать огромные расстояния можно пешком, не прилагая для этого таких серьезных усилий, как это происходило бы без участия гаджета. Также этот девайс поможет человеку поднимать и перемещать предметы, вес которых во много раз превышает вес самого оператора. Такие девайсы могут пригодиться в обстоятельствах боевых сражений для повышения выносливости и работоспособности пеших солдат. Для этой же цели могут быть созданы более крупные роботы, управляемы как экзо-скелет, но имеющие более крупный размер и вооружение совсем другого уровня, если мы говорим о военных роботах.
То, как управляются такие роботы, напоминает телекинез – способность двигать предметы силой мысли, однако это не так. Прочитать человеческие мысли и познать всю сложность человеческого сознания до сих пор не представляется возможным. К этому прикладываются немалые усилия, как и к созданию искусственного интеллекта, о котором рассказано ниже.
Манипуляторы под управлением искусственного интеллекта. Помощниками не только для больных, но и для вполне здоровых, но занятых людей могут стать роботы с искусственным интеллектом. Наличие искусственного интеллекта означает, что робот способен обучаться, т.е. самостоятельно, по мере своего развития, изменять собственный программный код. Попытки создания ИИ – так коротко называют Искусственный Интеллект – предпринимаются долгие годы, однако никому еще не удалось сделать это в идеальном виде. Одним из примеров такого робота можно назвать Watson’а. Watson – робот, обладающий способностью учиться, однако у него все равно отсутствуют некоторые навыки, свойственные человеку. К таким навыкам можно отнести умение составлять ассоциативный ряд или понимание метафор и переносных значений слов. Робот был предназначен для игры в «Jeopardy!» - аналог «Своей игры» на российском телевидении. Робот достойно выстоял против живых игроков, однако проблемы у него возникали там, где именно переносное понимание вопроса было ключевым моментом. Например, робот не может понять, что когда в вопросе упоминаются 90-е, то имеются в виду 90-е года XX-го века, 1990-1999 гг, в то время как для человека это очевидно. Это одно из главных препятствий в создании искусственного разума – невозможность придать ему человеческую интуицию, логику, чувства, мораль.
Возможно, когда-нибудь роботы с ИИ станут такой же обыденной вещью, как для нас – манипуляторы на заводах, умные пылесосы, космические корабли и марсоходы. К сожалению, а может быть и к счастью, прогнозы ученых сводятся к тому, что произойдет это не скоро, несмотря на многочисленные исследования и эксперименты.
Вкупе с манипуляторами искусственный интеллект сможет заполнить производство, вытеснив операторов и рабочих. Некоторые научные эксперименты, особенно в области физики и химии, могут выполняться обученными роботами, которые смогут не только провести эксперимент, но и сделать какие-либо выводы или выяснить причину неудачи. Космическая программа также приобретет новые возможности. Расширятся пределы досягаемой части Солнечной системы, а возможно и не только. Роботы-космонавты смогут путешествовать по Галактике, исследовать планеты и звезды, при этом не нуждаясь в запасах пищи и кислорода.
Сейчас активно ведется работа над роботами-военными, которые могли бы заменять живых солдат на поле боя. Они должны уметь распознавать врага и самостоятельно принимать решение об уничтожении цели или прекращении операции по каким-либо причинам. Все это еще на стадии проекта в виде компьютерной графики, но разговоры об это уже идут всерьез. Существует много опасений о том, что роботы с ИИ могут выйти из-под контроля, если упустить мельчайшую деталь в процессе их «воспитания» или программирования, и исправить эту ошибку будет уже невозможно. Особенно это опасно, если «восстанут против человечества» роботы, предназначенные для серьезных боевых действий. Поэтому сейчас внимание больше уделяется роботам-помощникам, которые могут следить за домом, делать фотографии, общаться с хозяином и выполнять его запросы. Об одном из таких роботов я прочитала на сайте http://hi-news.ru/. Авторы статьи утверждают, что создатели робота, представленного в промо-ролике, вплотную приблизились к созданию настоящего искусственного интеллекта. Даже если это и так, то система все равно еще не доведена до толкового состояния. «Голос» робота еще не совершенен, графика дисплея оставляет желать лучшего. Но то, что этот робот способен распознавать эмоции по выражению лица, запоминать любимые продукты хозяина и составлять маршруты, основываясь на своем опыте, действительно приближает его к машинам с настоящим искусственным интеллектом.
Заключение.
Итак, мне удалось выяснить, что манипуляторы – это пространственные механизмы из кинематических цепей и звеньев, образующих кинематические пары с угловым или поступательным относительным движением и системой приводов, чаще всего раздельных для каждой степени подвижности. Манипулятор предназначен для перемещения объектов в рабочей зоне, доступной рабочему органу.Мир уже привык к роботам, они стали неотъемлемой его частью. Медицинские роботы спасают жизни огромному количеству людей. Роботы в кинематографе не перестают удивлять нас своей реалистичностью. Промышленные роботы облегчают труд целых бригад рабочих, ускоряя и делая качественнее процесс изготовления продукции. Однажды роботы с искусственным интеллектом станут друзьями, помощниками и защитниками человечества.
Я справилась с поставленными в начале исследования задачами: я написала текст, основываясь на знаниях из различных источников, проиллюстрировала его и постаралась разобраться в устройстве манипуляторов. Мне было очень интересно искать информацию в книгах и прочих источниках, узнавать что-то новое для своего исследования. Подготовка текста реферата была достаточно сложной, но важной задачей, которая помогла осмыслить и систематизировать информацию, которую я нашла в источниках. Создание иллюстраций дало возможность найти пробелы в моих знаниях и понимании в теме и впоследствии устранить их. Благодаря тому, что я узнала о робототехнике и манипуляторах в течение этого года, наверняка сможет пригодиться мне в будущем. Даже если я не смогу стать настоящим робототехником или инженером, то мне все равно хотелось бы иметь хоть какую-нибудь возможность работать с роботами, не входящими в список обыденных устройств, присутствующих практически в каждом доме. Особенно меня заинтересовала тема искусственного интеллекта, так как она связана не только с программированием и физикой, но и с биологией, так как человеческий мозг – в первую очередь орган, который невозможно воспроизвести в виде программы, не изучив его работу в человеческом организме. Думаю, я смело могу добавлять робототехнику в список интересующих меня профессий.
Список литературы.
- Юревич Е.И. Основы робототехники. – 2-е изд., перераб. и доп. – СПб.: БХВ-Петербург, 2005. – 416 с.: ил.
- Зенкевич С.Л., Ющенко А.С. Основы управления манипуляционными роботами: Учебник для вузов. – 2-е изд., исправ. и доп. М.: Изд-во МГТУ им. Н. Э. Баумана, 2004, - 480 с.: ил.
- Корендясев А.И. Теоритические основы робототехники. – В 2 кн. – М.: Наука, 2006. – 383 с. (Кн.1).
- Попов Е. П., Верещагин А. Ф., Зенкевич С. Л. Манипуляционные роботы: динамика и алгоритмы. — М.: Наука, 1978. — 400 с. https://ru.wikipedia.org, Робототехника.
- Неизвестный автор, Робот-хирург Да Винчи. http://svagor.com/robot-xirurg
- Медведев В. С., Лесков А. Г., Ющенко А. С. Системы управления манипуляционных роботов. — М.: Наука, 1978. — 416 с.
- Д. Ловин. Создаем робота-андроида своими руками.: пер. с англ. Мельникова Г. – М.: Издательский дом ДМК-пресс, 2007 – 312 с.: ил.
- Неизвестный автор, статья о перспективах робототехники, tesla-tehnika.biz
- «NOVA: Самый умный робот», 2013 год, «Watson».
- Артем Батогов, «Робот Atlas получил обновления и стал больше похож на человека»; Николай Хижняк, « Cyberlegs – перспективное разработка протезирования нижних конечностей», http://hi-news.ru/.
ansya.ru
Реферат - Что такое робототехника для школьников? Ларионова М. А. Учитель информатики, моу «Гимназия №42»
Что такое робототехника для школьников?Ларионова М.А.
Учитель информатики, МОУ «Гимназия №42»
Что такое робот или кто это? Кем они стали для нас в нашем мире? Способны ли роботы заменить людей? Сегодня роботы используются для запуска спутников и поездки на другой планете в целом. Робот в настоящее время запущен на Марс для изучения планеты и в настоящее время разработан с разведывательными наравне с людьми.
Робот — автоматическое устройство с антропоморфным действием, которое частично или полностью заменяет человека при выполнении работ в опасных для жизни условиях или при относительной недоступности объекта.
Робот может управляться оператором либо работать по заранее составленной программе. Использование роботов позволяет облегчить или вовсе заменить человеческий труд на производстве, в строительстве, при рутинной работе, при работе с тяжёлыми грузами, вредными материалами, а также в других тяжёлых или небезопасных для человека условиях.
Человекоподобный робот (после его создания) станет первым универсальным инструментом, так как сможет пользоваться широчайшим набором любых технических средств, уже сделанных человеком для себя.
Идея искусственных созданий впервые упоминается в древнегреческом мифе о Кадме, который, убив дракона, разбросал его зубы по земле и запахал их, из зубов выросли солдаты, и в другом древнегреческом мифе о Пигмалионе, который вдохнул жизнь в созданную им статую — Галатею. Также в мифе про Гефеста рассказывается, как он создал себе различных слуг [3].
Что же такое робототехника? Робототехника (сам робот) фактически управляет компьютером именно созданной программой, в которой следует конкретный набор инструкций, и робот выполняет их так, как они определены в программе.
Сегодня с продвижением в программировании и различные роботы технологий к тому, чтобы думать, как люди. Они приходят с огромным интеллектом и могут выполнять сложные задачи, с гораздо большей точности и совершенству
Кроме того, роботы хорошо исполняющий повторяющихся задач, и они принимают на короткое время и доставку почти точной каждый раз. Робот, как правило, может контролироваться с помощью дистанционного управления, а также компьютер.
Слово «робототехника» было впервые использовано в печати Айзеком Азимовым в научно-фантастическом рассказе «Лжец», опубликованном в 1941 г.
Айзек Азимов -американский писатель-фантаст, популяризатор науки, по профессии биохимик [1]. Автор около 500 книг, в основном художественных (прежде всего в жанре научной фантастики, но также и в других жанрах: фэнтези, детектив, юмор) и научно-популярных (в самых разных областях — от астрономии и генетики до истории и литературоведения). Многократный лауреат премий Хьюго и Небьюла. Некоторые термины из его произведений — robotics (роботехника, роботика), positronic (позитронный), psychohistory (психоистория, наука о поведении больших групп людей) — прочно вошли в английский и другие языки. В англо-американской литературной традиции Азимова вместе с Артуром Кларком и Робертом Хайнлайном относят к «Большой тройке» писателей-фантастов [2].
Робототехника опирается на такие дисциплины как электроника, механика, программное обеспечение. Выделяют строительную, промышленную, бытовую, авиационную и экстремальную (военную, космическую, подводную) робототехнику.
В развитии методов управления роботами огромное значение имеет развитие технической кибернетики и теории автоматического управления, поэтому в настоящее время каждому человеку необходимо знать не только о наличии таких механизмов как роботы, но и о их структуре, функционированию. Многие люди не только разрабатывают автоматические машины, но и конечно же, программируют их, что развивает их творческий, интеллектуальный потенциал, и они могут выигрывать различные соревнования, которые проводятся по робототехнике
История робототехники восходит к 18-го века, где механические куклы были построены в Европе. Эти куклы были более игрушек, чтобы развлечь детей, и они осуществляются в большей степени одной инструкции. Это может быть ходьба на определенное расстояние большую часть времени. В 1801 г. автоматический ткацкий станок был изобретен Йозеф Мария Жаккард.
Промышленные роботы были построены в 1950-х и 1960-х. За это время Айзек Азимов увидел, что роботы имеют большое будущее, и сделали некоторые основные правила для проектирования роботов.
Робот не должно причинить вред человеческому существу,
Робот должен повиноваться поручений человека
Робот должен защищать свое собственное существование.
Эти три закона до сих пор используется в индустрии робототехники [1,3].
Робототехника используется в нескольких отраслях, таких как автомобили, медицина, бытовая техника и еще несколько. Наиболее сложные машины могут быть собраны помощью робототехники, а также очень важна роль в медицинской промышленности. С подготовкой лекарств для выполнения простых задач, в хирургии.
Робототехника является очень выгодным в несколько способов добрый человек. Например, люди много работают в неподходящих местах и условиях, таких как химические заводы, или фармацевтических препаратов, следовательно, постоянное воздействие химических веществ может быть опасным для здоровья самих людей.
Робот – это универсальный автомат, позволяющий выполнять механические действия. Его принципиальной особенностью является быстрая оперативная перестройка с одной выполняемой операции на другую. Существует несколько разновидностей роботов и для каждого из них имеется своё определение. Чаще всего говорят о трёх поколениях роботов: промышленных роботах или манипуляторах, адаптивных роботах и роботах с искусственным интеллектом или как говорили раньше – интегральных роботах.
В аптеках Шанхая работают роботы-фармацевты. Надо просто нажать на сенсорный экран с описанием симптомов, и робот поставит диагноз и даст необходимые рекомендации. Дальше остается только предложить автомату купюру, и лекарство можно забирать.
Роботы-санитары. Работают в некоторых британских больницах. Роботы производит сухую и влажную уборку, сами выбрасывают мусор, заправляются чистящими средствами и подзаряжаются. В отличие от живых уборщиц, роботы никогда не бубнят под нос и отличаются доброжелательным отношением к окружающим. Встретив кого-то на своем пути, они извиняются и докладывают, чем они сейчас заняты.
В Южной Корее сконструировали сторожевого робопса для охраны частных усадеб. Пес весит 40 кг, в его нос встроена фотокамера, а в корпусе имеется сотовый телефон, который немедленно посылает сигнал хозяину в случае обнаружения опасности. В критических случаях робот способен сам вызвать полицию.
Робот-фотограф. Его называют «стоп-кадр» и используют для фотографирования людей на вечеринках и других мероприятиях. Робот сам выбирает оптимальный ракурс и наводит объектив на лица. Как правило, 90 процентов снимков, сделанных роботом, оказываются удачными.
Японский семейный робот. Он запоминает до 7 членов семьи и распознает их по лицам или голосу. Словарный запас – 65 тыс. фраз и 1000 отдельных слов. Он держит в памяти привычки каждого члена семьи и пытается находить к каждому подход. Он краснеет в ответ на шутку и бледнеет в замешательстве.
И еще одно изобретения японцев - Рободансер. Робот-танцор способен попеременно выдавать диско, панк, фанк, рок, хипхоп, брэйк и т.д.
В современном мире любому школьник по силам собрать большого игрушечного робота. И действительно, с помощью конструктора Lego Mindstorms второго поколения любой свирепый монстр и миролюбивый робот оживают. Первое поколение Mindstorms, которое характеризовалось бесконечными возможностями, занимало даже взрослого человека.
Современная игрушка для детей, которая может решать любые взрослые задачи, прошла серьезные испытания. В тестах принимали активное участие военные. По большому счету можно сказать, Mindstorms тестировали в реальных военных условиях.
Наблюдая за поразительными аппаратными возможностями конструктора, возникает желание сделать действительно умного самостоятельного робота. Но во время создания такого робота, конструкторы столкнулись с некоторыми проблемами, а именно привычно отсылать NXT к нужной части кода просто невозможно.
Здесь не помог и расширенный режим программирования, где можно подробно определять маршруты передачи данных разных видов между всеми устройствами. В результате была создана линейная боевая программа.
Конструктор Lego Mindstorms NXT - новое поколение конструкторов Лего, позволяет создавать роботов с программируемыми микрокомпьютерами. Создание Лего Роботов состоит из нескольких этапов и займет не более 30 минут, а благодаря подробным инструкциям сделать это не составит труда.
Прежде всего, используя элементы Lego Technic, собирается сама модель, она может иметь любой вариант сборки: киборга, животного, транспортного средства или иной другой объект, который Вы придумаете сами.
Затем следует запрограммировать Робота при помощи специальной программы на компьютере, чтобы он мог выполнять команды.
Для программирования используется специальный язык программирования - RCX-код. Он имеет удобный и понятный интерфейс, в котором все команды представляются в виде обычных блоков Lego. И для написания программы перемещаете блоки с одного на другой, с их помощью можно с легкостью поручить двигателю совершать определенное количество оборотов, выставить чувствительность микрофона или дальность срабатывания дальномера.
Если вы никогда не программировали – не беспокойтесь, в программе предусмотрены тренировочные задания, которые помогут справиться с этой задачей. Данные с компьютера можно передавать как по USB-кабелю, так и через Bluetooth. А также и через мобильный телефон, при помощи Bluetooth.
Любой школьник без труда запрограммирует NXT, но, как ни странно, опытному программисту будет немного трудновато. Для того, чтобы создать программу довольно требуется нарисовать последовательность иконок, которые показывают то или иное действие. Элементарные настройки графически оформлены и инстинктивно понятны [4,5].
Для популяризации робототехники во многих странах ежегодно проводятся национальные чемпионаты по боям роботов. Для участия в этих соревнованиях создаются радиоуправляемые или автономные роботы. Считается, что подобные соревнования позволяют превратить изучение сложной техники в увлекательную игру, познавательную и развивающую.
Так, что же такое робот?
Хорошо ли, что наша жизнь становится автоматизированной?
И заменит ли робот человека?
На эти вопросы, со временем ответит каждый человек сам для себя. Хочет машины с ручной коробкой передач или автоматической, считать в уме или на калькуляторе, ходить за продуктами сам (дышать свежим воздухом) или послать «робота»…мир меняется, все меняется.
^ Список использованной литературы История и биография Айзека Азимова [Электронный ресурс]: Адрес с экрана: http://ru.wikipedia.org/wiki/ Азимов,_Айзек
Космические роботы – андроиды. [Электронный ресурс]: Адрес с экрана: http://robonaut.jsc.nasa.gov/R1/sub/ mobility.asp
История развития искусственного интеллекта [Электронный ресурс]: Адрес с экрана: http://habrahabr.ru/blogs/ popular_science/67361/
Самодельные LeoCAD детали для NXT [Электронный ресурс]: Адрес с экрана: http://www.mindstorms.su/ nxt_1_text_07.html
Проводной Датчик [Электронный ресурс]: Адрес с экрана: http://www.mindstorms.su/sensors_1_text_06.html
LEGO Mindstorms NXT 2.0 [Электронный ресурс]: Адрес с экрана: http://www.mindstorms.ru/mindstorms.php
www.ronl.ru
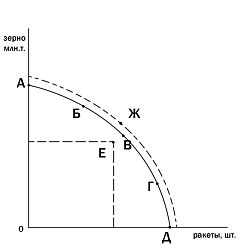






|
|
..:::Счетчики:::.. |
|
|
|
|
|
|
|
|