Контрольная работа «Кинематика» 10 класс
Контрольная работа «Кинематика», 10 класс
1вариант
1. Лыжник спускается с горы с начальной скоростью 6 м/с и ускорением 0,5 м/с2. Какова длина горы, если спуск с неё продолжался 12 с.
2. Автобус движется со скоростью 54 км/ч. На каком расстоянии от остановки водитель должен начать торможение, если для удобства пассажиров ускорение не должно превышать 1,2 м/с2.
3.Тело за 4 секунды изменило свою координату с 2 до 18 метров. Какова скорость тела
4. Два автомобиля перемещаются навстречу друг другу по параллельным дорогам со скоростями 36 км/ч и 12 м/с. Чему равна скорость одного автомобиля относительно другого
5. По данному уравнению υ = 5 + 6t определите, чему равно ускорение тела
6. Автомобиль движется со скоростью 20 м/с по закруглению дороги радиусом 50 метров.
7. По графику скорости материальной точки определите:
а) начальную скорость тела и скорость через 10 с
после начала движения,
б) ускорение тела,
в) запишите уравнение скорости тела
8. Координата движущегося тела с течением времени меняется по следующему закону: x=-1+3t-t2. Определите начальную координату тела, проекцию начальной скорости и проекцию ускорения. Укажите характер движения тела.
9. Троллейбус двигался со скоростью 18 км/ч и, затормозив, остановился через 4 с. Определите ускорение и тормозной путь троллейбуса.
Контрольная работа «Кинематика», 10 класс
2 вариант
1. При какой скорости самолет может приземлиться на посадочной полосе аэродрома длиной 800 м при торможении с ускорением 5 м/с2?
2. Через сколько секунд после отправления от станции скорость поезда метрополитена достигнет 72 км/ч, если ускорение при разгоне равно 1 м/с2?
3. Тело, имея координату 3 метра, перемещается в течении 4 секунд со скоростью 1,2 м/с. Какова конечная координата тела
Тело, имея координату 3 метра, перемещается в течении 4 секунд со скоростью 1,2 м/с. Какова конечная координата тела
4. Два автомобиля двигаются равномерно по параллельным дорогам, в одном направлении, со скоростями 72 км/ч и 15 м/с. Чему равна скорость одного автомобиля относительно другого?
5. По данному уравнению x = 8 – 2t определите, чему равна скорость тела.
6 . С какой скоростью перемещается тело по окружности радиусом 20 метров, если центростремительное ускорение тела равно 3,2 м/с2
7. По графику скорости материальной точки определите:
а) начальную скорость тела и скорость через 20 с
после начала движения,
б) ускорение тела,
в) запишите уравнение скорости тела.
8. Координата движущегося тела с течением времени меняется по следующему закону: х=10-t-2t
9. За время торможения, равное 5 с, скорость автомобиля уменьшалась с 72 км/ч до 36 км/ч. Определите ускорение автомобиля при торможении и длину тормозного пути.
Контрольная работа Кинематика 10 класс
Контрольная работа Кинематика 10 класс с ответами. Контрольная работа представлена в 5 вариантах, в каждом варианте по 4 задания.
Вариант 1
1. Установите соответствие между параметрами движения и уравнениями, их описывающими, для равноускоренного движения без начальной скорости.
| А) Координата Б) Скорость | 1) x0 + vt 2) v0 + at 3) vt 4) x0 +1/2at2 5) at |
2. В одном направлении из одной точки одновременно начали двигаться два тела: первое — с постоянной скоростью 5 м/с, второе — с постоянным ускорением 2 м/с2. Определите среднюю скорость второго тела до того момента, когда оно догонит первое тело.
Определите среднюю скорость второго тела до того момента, когда оно догонит первое тело.
3. Тело запускают вертикально вверх со скоростью 50 м/с. На какой высоте скорость тела будет равна 30 м/с и направлена вертикально вниз?
4. Как изменится дальность полета тела, брошенного горизонтально с большой высоты, если его скорость увеличить в 2 раза?
1) уменьшится в 2 раза
2) уменьшится в 4 раза
3) не изменится
4) увеличится в 2 раза
5) увеличится в 4 раза
Вариант 2
1. Установите соответствие между параметрами движения и формулами, их описывающими, для равнозамедленного движения с начальной скоростью v0.
| А) Координата Б) Скорость | 1) 2) v0 − at 3) vt 4) x0 + v0t − 1/2at2 5) v0 + at |
2. Автомобиль начал движение с ускорением 0,5 м/с2 в тот момент, когда мимо него проезжал трамвай со скоростью 5 м/с. Определите среднюю скорость автомобиля за промежуток времени, в течение которого автомобиль догонял трамвай.
Автомобиль начал движение с ускорением 0,5 м/с2 в тот момент, когда мимо него проезжал трамвай со скоростью 5 м/с. Определите среднюю скорость автомобиля за промежуток времени, в течение которого автомобиль догонял трамвай.
3. Тело было брошено вертикально вверх, и через 0,8 с полета его скорость уменьшилась в 2 раза. На какой высоте это произошло?
4. Как изменилась дальность полета тела, брошенного горизонтально, если высота полета увеличилась в 4 раза?
1) уменьшилась в 2 раза
2) уменьшилась в 4 раза
3) не изменилась
4) увеличилась в 2 раза
5) увеличилась в 4 раза
Вариант 3
1. Установите соответствие между параметрами движения и формулами, их описывающими, для равномерного движения по окружности.
| А) Ускорение Б) Скорость | 1) (v − v0)/t 2) 2πR/t 3) vt 4) x0 + 5) v2/R |
2. Два тела, находясь на расстоянии 187,5 м, одновременно начинают движение вдоль одной прямой навстречу друг другу. Начальная скорость первого тела 10 м/с, его ускорение 2 м/с2. Начальная скорость второго тела 20 м/с, его ускорение 1 м/с2. На сколько средняя скорость второго тела больше средней скорости первого тела за промежуток времени от начала движения до их встречи?
Два тела, находясь на расстоянии 187,5 м, одновременно начинают движение вдоль одной прямой навстречу друг другу. Начальная скорость первого тела 10 м/с, его ускорение 2 м/с2. Начальная скорость второго тела 20 м/с, его ускорение 1 м/с2. На сколько средняя скорость второго тела больше средней скорости первого тела за промежуток времени от начала движения до их встречи?
3. С балкона, находящегося на высоте 15 м, вертикально вверх бросают мяч со скоростью 10 м/с. Определите время полета мяча и его скорость в момент падения на землю.
4. Как изменится центростремительное ускорение точек обода колеса, если период обращения колеса уменьшится в 5 раз?
1) уменьшится в 5 раз
2) уменьшится в 25 раз
3) не изменится
4) увеличится в 5 раз
5) увеличится в 25 раз
Вариант 4
1. Установите соответствие между параметрами движения и формулами, их описывающими, для равноускоренного прямолинейного движения без начальной скорости.
| А) Модуль перемещения Б) Скорость | 1) x0 + at2/2 2) vt 3) at 4) x0 + v0t − 1/2at2 5) v0 + at |
2. Два тела движутся вдоль одной прямой навстречу друг другу. Начальная скорость первого тела 2 м/с, начальная скорость второго тела 4 м/с. Ускорение первого тела 0,5 м/с2, ускорение второго тела 0,2 м/с2. Ускорения направлены противоположно начальным скоростям тел. Определите расстояние между телами в начальный момент времени, если они встретились в тот момент, когда остановились.
3. Камень брошен вертикально вниз со скоростью 4 м/с с большой высоты. Определите среднюю скорость камня за первые 3 с полета.
4. Как изменится центростремительное ускорение точек обода колеса, если период обращения колеса увеличить в 3 раза?
1) уменьшится в 3 раза
2) уменьшится в 9 раз
3) не изменится
4) увеличится в 3 раза
5) увеличится в 9 раз
Вариант 5
1. Уравнение движения тела имеет вид х = 6t − 2t2. Какое уравнение правильно описывает зависимость проекции скорости vх этого тела от времени?
Уравнение движения тела имеет вид х = 6t − 2t2. Какое уравнение правильно описывает зависимость проекции скорости vх этого тела от времени?
1) vx = 6 − 2t
2) vx = 4t
3) vx = 6 − 4t
4) vx = -2t
5) vx = 12 − 4t
2. В тот момент, когда пассажиру оставалось до двери вагона дойти 12 м, поезд тронулся с ускорением 0,5 м/с2 из состояния покоя. Человек побежал со скоростью 4 м/с, догоняя состав. Сможет ли человек попасть в вагон? Сколько времени ему может понадобиться? Проанализируйте полученный ответ.
3. Камень бросили под углом 45° к горизонту. Максимальная высота подъема камня составила 15 м. Определите дальность полета камня.
4. Центростремительное ускорение второго колеса в 6,4 раза больше центростремительного ускорения первого. Во сколько раз радиус первого колеса больше радиуса второго, если период обращения первого колеса больше периода обращения второго в 4 раза?
Во сколько раз радиус первого колеса больше радиуса второго, если период обращения первого колеса больше периода обращения второго в 4 раза?
Ответы на контрольную работу Кинематика 10 класс
Вариант 1
1. А4 Б5
2. 5 м/с
3. 80 м
4. 4
Вариант 2
1. А4 Б2
2. 5 м/с
3. 9,6 м
4. 4
Вариант 3
1. А5 Б2
2. 7,5 м/с
3. 3 с; -20 м/с
4. 2
Вариант 4
1. A1 Б3
2. 44 м
3. 19 м/с
4. 2
Вариант 5
1. 3
2. Сможет; 4 с, 12 с
3. 300 м
4. В 2,5 раза
Контрольная работа по физике 10 класс Кинематика
Вариант 1
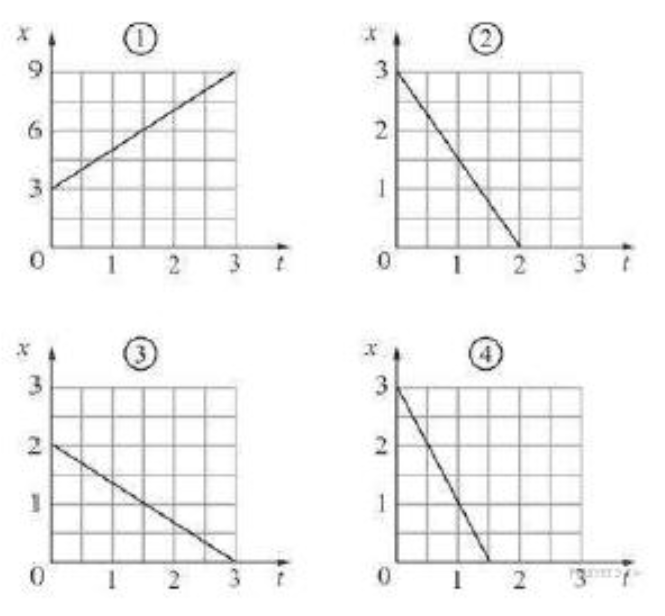
1. На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 0 до 10 с. Ответ выразите в м/с.
Ответ:-10
2. Пловец плывет по течению реки. Определите скорость пловца относительно берега, если скорость пловца относительно воды 0,4 м/с, а скорость течения реки 0,3 м/с. (Ответ дайте в метрах в секунду.)
Пловец плывет по течению реки. Определите скорость пловца относительно берега, если скорость пловца относительно воды 0,4 м/с, а скорость течения реки 0,3 м/с. (Ответ дайте в метрах в секунду.)
Ответ: 0,7
3. Тело брошено вертикально вверх. Через 0,5 с после броска его скорость 20 м/с. Какова начальная скорость тела? Сопротивлением воздуха пренебречь. (Ответ дайте в метрах в секунду.)
Ответ: 25
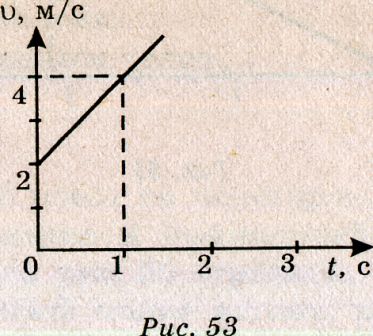
4. При прямолинейном движении зависимость координаты тела x от времени t имеет вид:
Чему равна скорость тела в момент времени t = 2 c при таком движении? (Ответ дайте в метрах в секунду.)
Ответ: 18
5. На графике приведена зависимость скорости тела от времени при прямолинейном движении. Определите по графику ускорение тела. (Ответ дайте в метрах в секунду в квадрате. )
)
Ответ: 10
6. Материальная точка движется по окружности радиусом 4 м. На графике показана зависимость модуля её скорости v от времени t. Чему равен модуль центростремительного ускорения точки в момент t = 3 с? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 9
7. Автомобиль движется по окружности радиусом 100 м со скоростью 10 м/с. Чему равно центростремительное ускорение автомобиля? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 1
8. На рисунке приведены графики зависимости координаты от времени для двух тел: А и В, движущихся по прямой, вдоль которой и направлена ось Ох. Выберите два верных утверждения о движении тел.
1) Тело А движется равноускоренно.
2) Временнόй интервал между встречами тел А и В составляет 6 с.
3) В течение первых пяти секунд тела двигались в одном направлении.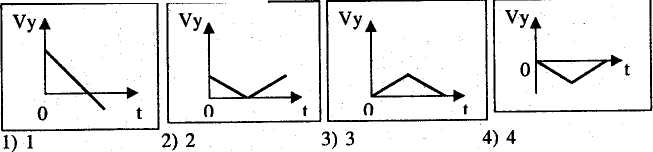
4) За первые 5 с тело А прошло 15 м.
5) Тело В движется с постоянным ускорением.
Ответ: 25|52
9. Анализируя график зависимости модуля скорости тела от времени, выберите из приведённых ниже утверждений три правильных и укажите их номера.
1) Скорость тела за шесть секунд изменилась от 0 м/с до 6 м/с.
2) Тело двигалось равноускоренно в интервале от 0 до 1 с и в интервале от 2 до 4 с, и равномерно в интервалах 1−2 и 4−6 с.
3) Тело двигалось равноускоренно в интервале от 0 до 1 с и в интервале от 2 до 4 с, и не двигалось в интервалах 1−2 и 4−6 с.
4) За 6 с тело прошло путь 23 м.
5) За 6 с тело прошло путь 36 м.
Ответ: 124
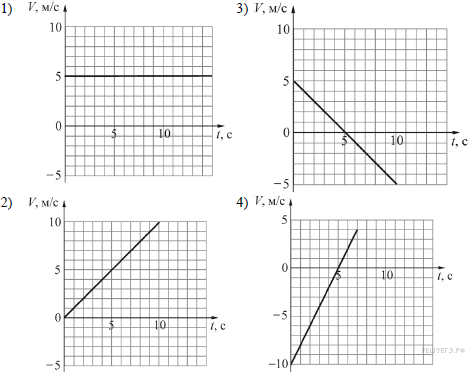
10.Небольшое тело движется вдоль оси OX. На рисунке показан график зависимости проекции скорости Vx этого тела на указанную ось от времени t. Выберите два верных утверждения на основании анализа графика.
Выберите два верных утверждения на основании анализа графика.
1) За первые 10 секунд движения тело проходит такой же путь, как и за последние 20 секунд движения
2) В интервале времени от t = 0 с до t = 20 с тело покоится
3) Тело всё время движется в одном направлении.
4) Тело оказывается на максимальном расстоянии от своего начального положения через 30 секунд после начала движения
5) В моменты времени t = 10 с и t = 50 с тело имеет разные ускорения
Ответ: 14|41
Вариант 2
1. На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 30 до 50 с. Ответ выразите в м/с. Ответ: 5
2. Пароход движется по реке против течения со скоростью 5 м/с относительно берега. Определите скорость течения реки, если скорость парохода относительно берега при движении в обратном направлении равна 8 м/с. (Ответ дайте в метрах в секунду.)
Определите скорость течения реки, если скорость парохода относительно берега при движении в обратном направлении равна 8 м/с. (Ответ дайте в метрах в секунду.)
Ответ: 1,5
3. Тело брошено вертикально вверх с начальной скоростью 15 м/с. Чему равен модуль скорости тела через 0,5 c после начала отсчета времени? Сопротивление воздуха не учитывать. (Ответ дайте в метрах в секунду.)
Ответ: 10
4. Зависимость координаты x тела от времени t имеет вид:
Чему равна проекция скорости тела на ось Ox в момент времени t = 3 с при таком движении? (Ответ дайте в метрах в секунду.)
Ответ: 20
5. На графике приведена зависимость проекции скорости vx тела от времени. Определите ускорение тела ax. (Ответ дайте в метрах в секунду в квадрате. )
)
Ответ: 8
6. Материальная точка движется по окружности радиусом 4 м. На графике показана зависимость модуля её скорости v от времени t. Чему равен модуль центростремительного ускорения точки в момент t = 5 с? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 1
7. Груз, подвешенный на нити длиной 2 м, отведён в сторону и отпущен. Нижнюю точку траектории он проходит со скоростью 1,4 м/с. Найдите центростремительное ускорение груза в нижней точке траектории. (Ответ дайте в метрах в секунду в квадрате и округлите до целых.)
Ответ: 1
8. На рисунке приведены графики зависимости координаты от времени для двух тел: А и В, движущихся по прямой, вдоль которой направлена ось Ох. Выберите два верных утверждения о характере движения тел.
1) Тело А движется с постоянной скоростью, равной 5 м/с.
2) В момент времени t = 5 с скорость тела В была больше скорости тела А.
3) В течение первых пяти секунд тела двигались в одном направлении.
4) В момент времени t = 2 с тела находились на расстоянии 20 м друг от друга.
5) За первые 5 с движения тело В прошло путь 15 м.
Ответ: 13
9. В эксперименте получен график зависимости модуля скорости прямолинейно движущегося тела от времени. Анализируя график, выберите из приведённых ниже утверждений три правильных и укажите их номера.
1) Модуль скорости тела за 6 секунд изменился от 0 м/с до 6 м/с.
2) Из четырёх интервалов времени максимальный путь был пройден телом в интервале времени от 4 до 6 с.
3) Тело двигалось равнозамедленно в течение первых 6 секунд и не двигалось в интервале от 6 до 7 с.
4) Тело двигалось равноускоренно в течение первых 6 секунди не двигалось в интервале от 6 до 7 с.
5) Тело двигалось равномерно в интервале от 6 до 7 секунд со скоростью 6 м/с.
Ответ: 125
10.Небольшое тело движется вдоль оси OX. На рисунке показан график зависимости проекции скорости Vx этого тела на указанную ось от времени t. Выберите два верных утверждения на основании анализа графика.
1) За первые 30 секунд движения тело проходит такой же путь, как и за последние 30 секунд движения
2) В интервале времени от t = 20 с до t = 35 с тело движется равномерно
3) В момент времени t = 30 с тело останавливается
4) Тело оказывается на максимальном расстоянии от своего начального положения через 60 секунд после начала движения
5) В моменты времени t = 23 с и t = 33 с тело имеет одинаковое ускорение
Ответ: 35|53
Вариант 3
1. На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 50 до 70 с. Ответ выразите в м/с.
На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 50 до 70 с. Ответ выразите в м/с.
Ответ: -7,5
2. Автобус везёт пассажиров по прямой дороге со скоростью 10 м/с. Пассажир равномерно идёт по салону автобуса со скоростью 1 м/с относительно автобуса, двигаясь от задней двери к кабине водителя. Чему равен модуль скорости пассажира относительно дороги? (Ответ дайте в метрах в секунду.) Ответ: 11
3. Зависимость координаты x тела от времени t имеет вид:
Чему равна проекция скорости тела на ось Ox в момент времени t = 1 с при таком движении? (Ответ дайте в метрах в секунду.)
Ответ: 0
4. Тело брошено вертикально вверх. Через 1,5 с после броска его скорость 20 м/с. Какова начальная скорость тела? Сопротивлением воздуха пренебречь. (Ответ дайте в метрах в секунду.)
Какова начальная скорость тела? Сопротивлением воздуха пренебречь. (Ответ дайте в метрах в секунду.)
Ответ: 35
5. На графике приведена зависимость проекции скорости тела от времени. Определите по графику модуль ускорения тела. (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 10
6. Материальная точка движется по окружности радиусом 4 м. На графике показана зависимость модуля её скорости v от времени t. Чему равен модуль центростремительного ускорения точки в момент t = 3 с? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 9
7. Верхнюю точку моста радиусом 100 м автомобиль проходит со скоростью 20 м/с. Чему равно центростремительное ускорение автомобиля? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 4
8. На рисунке приведены графики зависимости координаты от времени для двух тел: А и В, движущихся по прямой, вдоль которой и направлена ось Ох. Выберите два верных утверждения о характере движения тел.
Выберите два верных утверждения о характере движения тел.
1) Тело А движется равномерно.
2) Тело А движется с постоянной скоростью, равной 5 м/с.
3) Первый раз тела А и В встретились в момент времени равный 3 с.
4) Вторично тела А и В встретились в момент времени, равный 7 с.
5) В момент времени t = 5 с тело В достигло максимальной скорости движения.
Ответ: 13|31
утверждений три правильных и укажите их номера.
1) Скорость тела за шесть секунд изменилась от 0 м/с до 6 м/с.
2) Тело двигалось равноускоренно в интервале от 0 до 1 с и в интервале от 2 до 4 с, и равномерно в интервалах 1−2 и 4−6 с.
3) Тело двигалось равноускоренно в интервале от 0 до 1 с и в интервале от 2 до 4 с, и не двигалось в интервалах 1−2 и 4−6 с.
4) За 6 с тело прошло путь 23 м.
5) За 6 с тело прошло путь 36 м.
Ответ: 124
10.Небольшое тело движется вдоль оси OX. На рисунке показан график зависимости проекции скорости Vx этого тела на указанную ось от времени t. Выберите два верных утверждения на основании анализа графика.
1) За первые 10 секунд движения тело проходит такой же путь, как и за последние 20 секунд движения
2) В интервале времени от t = 0 с до t = 20 с тело покоится
3) Тело всё время движется в одном направлении.
4) Тело оказывается на максимальном расстоянии от своего начального положения через 30 секунд после начала движения
5) В моменты времени t = 10 с и t = 50 с тело имеет разные ускорения
Ответ: 14|41
Вариант 4
1. На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 10 до 30 с. Ответ выразите в м/с. Ответ:2.5
На рисунке представлен график зависимости координаты х велосипедиста от времени t. Найдите скорость велосипедиста в интервале времени от 10 до 30 с. Ответ выразите в м/с. Ответ:2.5
2. Мотоцикл едет по прямой дороге с постоянной скоростью 50 км/ч. По той же дороге навстречу ему едет автомобиль с постоянной скоростью 70 км/ч. Чему равен модуль скорости движения мотоцикла относительно автомобиля? (Ответ дайте в километрах в час.)
Ответ: 120
3. Тело брошено вертикально вверх с начальной скоростью 20 м/с. Чему равен модуль скорости тела через 0,5 c после начала отсчета времени? Сопротивление воздуха не учитывать. (Ответ дайте в метрах в секунду.)
Ответ: 15
4. Зависимость координаты x тела от времени t имеет вид:
Чему равна проекция скорости тела на ось Ox в момент времени t = 3 с при таком движении? (Ответ дайте в метрах в секунду.)
Ответ: 6
5. На графике приведена зависимость скорости тела от времени при прямолинейном движении. Определите по графику ускорение тела. (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 6
6. Материальная точка движется по окружности радиусом 4 м. На графике показана зависимость модуля её скорости v от времени t. Чему равен модуль центростремительного ускорения точки в момент t = 5 с? (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 1
7. Груз, подвешенный на нити длиной 2 м, отведён в сторону и отпущен. Нижнюю точку траектории он проходит со скоростью 0,4 м/с. Найдите центростремительное ускорение груза в нижней точке траектории. (Ответ дайте в метрах в секунду в квадрате.)
Ответ: 0,08
8. На рисунке приведены графики зависимости координаты от времени для двух тел: А и В, движущихся по прямой, вдоль которой направлена ось Ох. Выберите два верных утверждения о характере движения тел.
1) Тело А движется с постоянной скоростью, равной 10 м/с.
2) В момент времени t = 5 с скорость тела A была больше скорости тела B.
3) В течение первых семи секунд тела двигались в одном направлении.
4) В момент времени t = 2 с тела находились на расстоянии 10 м друг от друга.
5) За первые 5 с движения тело В прошло путь 15 м.
Ответ: 24|42
9. В эксперименте получен график зависимости модуля скорости прямолинейно движущегося тела от времени. Анализируя график, выберите из приведённых ниже утверждений три правильных и укажите их номера.
1) Модуль скорости тела за 6 секунд изменился от 0 м/с до 6 м/с.
2) Из четырёх интервалов времени максимальный путь был пройден телом в интервале времени от 4 до 6 с.
3) Тело двигалось равнозамедленно в течение первых 6 секунд и не двигалось в интервале от 6 до 7 с.
4) Тело двигалось равноускоренно в течение первых 6 секунди не двигалось в интервале от 6 до 7 с.
5) Тело двигалось равномерно в интервале от 6 до 7 секунд со скоростью 6 м/с.
Ответ: 125
10.Небольшое тело движется вдоль оси OX. На рисунке показан график зависимости проекции скорости Vx этого тела на указанную ось от времени t. Выберите два верных утверждения на основании анализа графика.
1) За первые 10 секунд движения тело проходит такой же путь, как и за последние 20 секунд движения
2) В интервале времени от t = 0 с до t = 20 с тело покоится
3) Тело всё время движется в одном направлении.
4) Тело оказывается на максимальном расстоянии от своего начального положения через 30 секунд после начала движения
5) В моменты времени t = 10 с и t = 50 с тело имеет разные ускорения
Ответ: 14|41
Контрольная работа по теме «Кинематика» (10 класс)
Тема: Контрольная работа по теме: «Кинематика».
Цель: Проверить уровень знаний учащихся по теме «Кинематика».
Оборудование: задания в двух вариантах.
Тип урока: контроль и оценивание знаний.
Вариант 1
Задание 1 (1 балл)
Траекторией движения тела называется…
A. … путь, пройденный телом.
Б. … вектор, соединяющий начальное и конечное положение тела.
B. … линия, по которой движется тело.
Г. … длина отрезка, соединяющего начальное и конечное положение тела.
Задание 2 (2 балла)
Колесо обозрения совершает один оборот за 5 мин. Какова частота его обращения?
A. 1/ЗООс-1 Б. 1/5с-1
B. 5с-1 Г. 300с-1
Задание 3 (2 балла)
Автомобиль, остановившийся перед светофором, набрал затем скорость 54км/ч на пути 45м. С каким ускорением он двигался?
Задание 4 (3 балла)
Одну треть пути тело двигалось со скоростью 90км/ч, а две трети — со скоростью 60км/ч. Найдите среднюю скорость движения.
Задание 5 (4 балла)
Свободное падение тела продолжалось 6с. На какой высоте находилось тело за 2с до падения на землю?
Вариант 1 (ответы)
1. В 1 б.
Вариант 2
Задание 1 (1 балл)
Какая из названных ниже величин является скалярной?
A. Перемещение. Б. Скорость
B. Ускорение. Г. Путь.
Задание 2 (2 балл)
Модель самолёта при работе аттракциона движется по окружности со скоростью 5м/с, совершая один оборот за 4с. Каков радиус окружности?
A. 7,85м. Б. 6,4м.
B. 5м. Г. 3,2м.
Задание 3 (2 балл)
Автомобиль, разгоняющийся с ускорением 0,5м/с2, достиг скорости
18м/с. С какой скоростью он будет двигаться через 6с, продолжая
разгоняться с тем же ускорением?
А. 18,5м/с. Б.21м/с. В.24м/с. Г. 54м/с.
Задание 4 (3 балла)
Поезд, двигаясь под уклон, прошел за 10с путь 160м и развил скорость 17м/с. Какой была скорость поезда в начале уклона?
Задание 5 (4 балл)
Тело свободно падало с высоты 20м. На какой высоте оно находилось, когда прошла половина всего времени падения?
Вариант 2 (ответы)
1. Г 1 б.
.
Контрольная работа по кинематике | Материал по физике (10 класс) по теме:
Контрольная работа носит тематический характер. Каждый вариант содержит задачи разных уровней сложности. Учащийся может ознакомиться со всеми заданиями и самостоятельно выбрать уровень сложности, приемлемый для него в данный момент.
Каждый вариант включает 6 заданий.
1,2,3 задачи — первый уровень сложности. Эти задания рассчитаны на усвоение основных понятий, на простое отображение материала или несложные расчеты при узнавании и воспроизведении.
4.5 задачи- второй уровень сложности. Эти задания на 2-4 логических шага. Решение этих заданий требует более глубоких знаний по курсу физики и позволяет их применять в стандартных ситуациях.
6 задача- третий уровень сложности –задания, решения которых требует творческого использования приобретенных знаний и позволяет применять их в нестандартных ситуациях.
Правильность выполнения каждого задания оценивается в баллах:
1,2,3 задачи: по 1-2 балла
4-5 задачи: по 3 балла
6 задача: по 4 балла
Для оценивания результатов контрольной работы следует использовать следующие критерии:
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
1 вариант | 2 вариант |
Автомобиль движется со скоростью 72км/ч.Определить ускорение автомобиля, если через 20минут он остановится. (1балл) | Троллейбус трогается с места с ускорением 1,2 м/с2 . Какую скорость приобретает троллейбус за 1 минуту? (1 балл) |
Точка вращается по окружности радиусом 0,2м с периодом 2с. Определить линейную скорость.(2 балла) | Чему равен период колеса ветродвигателя, если за 2 минуты колесо сделало 50 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Самолет при посадке коснулся посадочной полосы аэродрома при скорости 252 км/ч.Через 30 секунд он остановился. Определить путь , пройденный самолетом при посадке. | Тело брошено вертикально вниз со скоростью 5м/с с высоты 20м. Определить время падения тела на землю и скорость тела в момент падения. |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
3 вариант | 4 вариант |
Автомобиль при разгоне за 10 секунд приобретает скорость 54 км/ч. Определить ускорение автомобиля. (1балл) | Вагонетка движется из состояния покоя с ускорением 0,25 м/с2. Какую скорость будет иметь вагонетка через 2 минуты от начала движения? (1 балл) |
Определить период вращающегося диска, если он за 10секунд делает 40 оборотов. (2 балла) | Какова скорость трамвайного вагона,движущегося по закруглению радиусом 50 метров с центростремительным ускорением 0,5м/с2.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Тело свободно падает с высоты 24 метра(без начальной скорости). Определить время падения тела и скорость тела в момент падения на землю.(3 балла) | Автомобиль , двигаясь со скоростью 43,2 км/ч, останавливается при торможении в течение 3 секунд. Какое расстояние он пройдет до остановки?(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
5 вариант | 6 вариант |
Поезд тронулся с места и через 10секунд разогнался до 54 км/ч. Определить ускорение поезда. (1балл) | Автомобиль ,трогаясь с места, движется с ускорением 0,25 м/с2. Какую скорость будет иметь автомобиль через 4 минуты от начала движения? (1 балл) |
Определить период вращающегося колеса, если он за 2минуты делает 60 оборотов. (2 балла) | Какова скорость автомобиля ,движущегося по закруглению радиусом 60 метров с центростремительным ускорением 1м/с2.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Автомобиль , двигаясь в течение некоторого отрезка времени с ускорением 0,6 м/с2, совершил перемещение 400м. Какова конечная скорость автомобиля ,если его начальная скорость 20,5 м/с?(3 балла) | Камень свободно падает с высоты 56 метров(без начальной скорости). Определить время падения камня и скорость в момент падения на землю(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
7 вариант | 8 вариант |
Поезд ,трогаясь с места, движется с ускорением 1м/с2. Какую скорость будет иметь поездчерез 5 минут от начала движения? (1 балл) | Автомобиль тронулся с места и через 30 секунд разогнался до 60 км/ч. Определить ускорение автомобиля. (1балл) |
Точка обращается по окружности радиуса 1,5 метра с центростремительным ускорением 25 м/с2 Определить скорость точки. (2 балла) | Каково центростремительное ускорение тела при его равномерном движении по окружности радиусом 10 см, если при этом тело совершает 30 оборотов в минуту.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Автомобиль , двигаясь в течение некоторого отрезка времени со скоростью 90 м/с, снижает свою скорость до 72 км/ч на пути длиной 56,25 4м. Каково ускорение автомобиля при торможении и время торможения?(3 балла) | Тело, двигавшееся со скоростью 108км/ч,тормозит с ускорением 2м/с2 на пути длиной 200метров. Определить конечную скорость тела и время торможения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
9 вариант | 10 вариант |
Автомобиль движется со скоростью 108 км/ч.Определить ускорение автомобиля, если через 3 минуты он остановится. (1балл) | Троллейбус трогается с места с ускорением 2 м/с2 . Какую скорость приобретает троллейбус за 7 минут? (1 балл) |
Точка вращается по окружности радиусом 2м с периодом 10 с. Определить линейную скорость.(2 балла) | Чему равен период колеса ветродвигателя, если за 3 минуты колесо сделало 10 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Вертолет при посадке коснулся посадочной полосы аэродрома при скорости 126 км/ч.Через 15 секунд он остановился. Определить путь , пройденный вертолетом при посадке.(3 балла) | Тело брошено вертикально вниз со скоростью 15м/с с высоты 30м. Определить время падения тела на землю и скорость тела в момент падения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
11 вариант | 12 вариант |
Автобус трогается с места с ускорением 0,4м/с2 . Какую скорость приобретает автобус за 3 минуты? (1 балл) | Поезд движется со скоростью 60 км/ч.Определить ускорение поезда, если через 0,5 минут он остановится. (1балл) |
Точка вращается по окружности радиусом 5м с частотой 2 Гц. Определить линейную скорость.(2 балла) | Чему равна частота колеса ветродвигателя, если за 3 минуты колесо сделало 10 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Вертолет при посадке коснулся посадочной полосы аэродрома при скорости 126 км/ч.Через 15 секунд он остановился. Определить путь , пройденный вертолетом при посадке.(3 балла) | Тело брошено вертикально вниз со скоростью 15м/с с высоты 30м. Определить время падения тела на землю и скорость тела в момент падения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
Контрольная работа по КИНЕМАТИКЕ 10 класс
Контрольная работа по КИНЕМАТИКЕ 10 класс. 2011 год
Относительность движения.
Плот плывёт со скоростью 3 м/с. Перпендикулярно течению идёт мальчик со скоростью 4м/с относительно плота. Определить скорость мальчика относительно берега. Какое перемещение он совершит за 2 с относительно плота и относительно берега.
Девочка, чтобы двигаться перпендикулярно берегу, плывет относительно воды под углом 450 к берегу. Какова скорость течения реки, если расстояние между берегами 30 м она преодолевает за 10 с?
При безветренной погоде парашютист приземляется со скоростью 4м/с. С какой скоростью он приземлится при ветре силой 3м/с, дующем горизонтально? Как будет направлена эта скорость?
Равноускоренное прямолинейное движение движение.
Начальная скорость тела 7,2 км/час, ускорение 1 м/с2, найти его скорость и перемещение через 4 с. Построить график зависимости модуля скорости от времени.
Тело двигалось замедленно до остановки в течение 4 с. Модуль ускорения равнялся 1м/с2. Какова была начальная скорость, какое перемещение совершило тело. Построить график зависимости модуля скорости от времени.
Тело за 4 с изменило свою скорость с 2 м/с до 6 м/с. Каким было ускорение тела? Какое перемещение оно совершило? Построить график зависимости модуля скорости от времени.
Автомобиль разогнался с места до скорости 72 км/час за 5 с. С каким ускорением он двигался? Какой путь прошёл? Построить график зависимости модуля скорости от времени.
Свободное падение.
Тело бросили вертикально вверх со скоростью 20 м/с. На какую высоту поднимется тело? Сколько времени будет подниматься? Какова будет скорость на высоте 15м? ( g=10м/с2)
Тело начинает падать с высоты 20м. Сколько времени оно будет падать? Какая скорость будет в момент падения? Какой путь оно пройдет за первую секунду? ( g=10м/с2)
Тело бросили вертикально вверх со скоростью 40 м/с. На какую высоту поднимется тело? Сколько времени будет подниматься? Какова будет скорость на высоте 20м? ( g=10м/с2)
Тело начинает падать с высоты 40м. Сколько времени оно будет падать? Какая скорость будет в момент падения? Какой путь оно пройдет за первую секунду? ( g=10м/с2)
Движение по окружности.
Тело равномерно движется по окружности. Найти период, центростремительное ускорение, частоту. Радиус 2м, скорость 6м/с. (π=3)
Тело равномерно движется по окружности. Найти период, скорость, частоту. Радиус 2м, ускорение 18м/с2. (π=3)
Тело равномерно движется по окружности. Найти период, радиус, частоту. Ускорение 18м/с2, скорость 6м/с. (π=3)
Тело равномерно движется по окружности. Найти период, центростремительное ускорение, частоту. Радиус 2м, скорость 6м/с. (π=3)
Контрольная работа по теме Кинематика 10 класс
Контрольная работа по теме Кинематика для учащихся 10 класса с ответами. Контрольная работа состоит из 5 вариантов, в каждом по 8 заданий.
1 вариант
A1. Какое тело, из перечисленных ниже, оставляет видимую траекторию?
1) Камень, падающий в горах
2) Мяч во время игры
3) Лыжник, прокладывающий новую трассу
4) Легкоатлет, совершающий прыжок в высоту
А2. Материальная точка, двигаясь прямолинейно, переместилась из точки с координатами (-2; 3) в точку с координатами (1; 7). Определите проекции вектора перемещения на оси координат.
1) 3 м; 4 м
2) -3 м; 4 м
3) 3 м; -4 м
4) -3 м; -4 м
А3. Во время подъема в гору скорость велосипедиста, двигающегося прямолинейно и равноускоренно, изменилась за 8 с от 5 м/с до 3 м/с. При этом ускорение велосипедиста было равно
1) -0,25 м/с2
2) 0,25 м/с2
3) -0,9 м/с2
4) 0,9 м/с2
А4. При прямолинейном равноускоренном движении с начальной скоростью, равной нулю, путь, пройденный телом за три секунды от начала движения, больше пути, пройденного за первую секунду, в
1) 2 раза
2) 3 раза
3) 4 раза
4) 9 раз
А5. На графике изображена зависимость проекции скорости тела, движущегося вдоль оси ОХ, от времени.
Какое перемещение совершило тело к моменту времени t = 5 с?
1) 2 м
2) 6 м
3) 8 м
4) 10 м
B1. Вагон шириной 2,4 м, движущийся со скоростью 15 м/с, был пробит пулей, летевшей перпендикулярно к направлению движения вагона. Смещение отверстий в стенах вагона относительно друг друга 6 см. Найдите скорость пули.
В2. Два шкива разного радиуса соединены ременной передачей и приведены во вращательное движение (см. рис.).
Как изменяются перечисленные в первом столбце физические величины при переходе от точки А к точке В, если ремень не проскальзывает?
Физические величины
А) линейная скорость
Б) период вращения
В) угловая скорость
Их изменение
1) увеличится
2) уменьшится
3) не изменится
C1. В течение 20 с ракета поднимается с постоянным ускорением 8 м/с2, после чего двигатели ракеты выключаются. На какой максимальной высоте побывала ракета?
2 вариант
A1. Исследуется перемещение лошади и бабочки. Модель материальной точки может использоваться для описания движения
1) только лошади
2) только бабочки
3) и лошади, и бабочки
4) ни лошади, ни бабочки
А2. В трубопроводе с площадью поперечного сечения 100 см2 нефть движется со скоростью 1 м/с. Какой объем нефти проходит по трубопроводу в течение 10 мин?
1) 0,1 м3
2) 0,6 м3
3) 6 м3
4) 60 м3
А3. Автомобиль движется по шоссе с постоянной скоростью и начинает разгоняться. Проекция ускорения на ось, направленную по вектору начальной скорости автомобиля
1) отрицательна
2) положительна
3) равна нулю
4) может быть любой по знаку
А4. Каретка спускается по наклонной плоскости, длиной 15 см в течение 0,26 с. Определите ускорение каретки, если движение начинается из состояния покоя.
1) 1,7 м/с2
2) 2,2 м/с2
3) 4,4 м/с2
4) 6,2 м/с2
А5. На рисунке представлен график зависимости пути s велосипедиста от времени t. В каком интервале времени велосипедист не двигался?
1) От 0 с до 1 с
2) От 1 с до 3 с
3) От 3 с до 5 с
4) От 5 с и далее
B1. На пути 60 м скорость тела уменьшилась в три раза за 20 с. Определите скорость тела в конце пути, считая ускорение постоянным.
B2. На поверхность диска с центром в точке О нанесли две точки А и В (причем ОВ = ВА), и привели диск во вращение с постоянной линейной скоростью (см. рис.).
Как изменятся перечисленные в первом столбце физические величины при переходе от точки А к точке В?
Физические величины
А) угловая скорость
Б) период обращения по окружности
В) центростремительное ускорение
Их изменения
1) увеличится
2) уменьшится
3) не изменится
C1. Аэростат поднимается с Земли с ускорением 2 м/с2 вертикально вверх без начальной скорости. Через 20 с после начала движения из него выпал предмет. Определите, на какой наибольшей высоте относительно Земли побывал предмет.
3 вариант
A1. Решаются две задачи:
А) рассчитывается скорость погружения подводной лодки;
Б) рассчитывается время движения лодки от одной военной базы до другой.
В каком случае подводную лодку можно рассматривать как материальную точку?
1) Только в первом
2) Только во втором
3) В обоих случаях
4) Ни в первом, ни во втором
А2. Материальная точка, двигаясь прямолинейно, переместилась из точки с координатами (-2; 3) в точку с координатами (1; 7). Определите модуль вектора перемещения на оси координат.
1) 1 м
2) 2 м
3) 5 м
4) 7 м
А3. Санки съехали с одной горки и въехали на другую. Во время подъема на горку скорость санок, двигавшихся прямолинейно и равноускоренно, за 4 с изменилась от 43,2 км/ч до 7,2 км/ч. При этом модуль ускорения был равен
1) -2,5 м/с2
2) 2,5 м/с2
3) -3,5 м/с2
4) 3,5 м/с2
А4. К.Э. Циолковский в книге «Вне Земли», описывая полет ракеты, отмечал, что через 8 с после старта ракета находилась на расстоянии 3,2 км от поверхности Земли. С каким ускорением двигалась ракета?
1) 1000 м/с2
2) 500 м/с2
3) 100 м/с2
4) 50 м/с2
А5. По графику зависимости модуля скорости от времени определите путь, пройденный телом за 20 с.
1) 60 м
2) 80 м
3) 50 м
4) 40 м
В1. Охотник стреляет в птицу, летящую на расстоянии 36 м от него со скоростью 15 м/с в направлении перпендикулярном линии прицеливания. Какой путь пролетит птица от момента выстрела до попадания в нее дроби, если скорость дроби при вылете из ружья 400 м/с?
В2. Два шкива разного радиуса соединены ременной передачей и приведены во вращательное движение (см. рис.).
Как изменяются перечисленные в первом столбце физические величины при переходе от точки В к точке А, если ремень не проскальзывает?
Физические величины
А) линейная скорость
Б) период вращения
В) угловая скорость
Их изменение
1) увеличится
2) уменьшится
3) не изменится
С1. В течение 20 с ракета поднимается с постоянным ускорением 8 м/с2 после чего двигатели ракеты выключаются. Через какое время после этого ракета упадет на Землю?
4 вариант
А1. Какое тело из перечисленных ниже двигается прямолинейно?
1) Конец минутной стрелки
2) Автомобиль на крутом вираже
3) Мальчик на качелях
4) Взлетающая ракета
А2. Поезд длиной 350 м двигается равномерно со скоростью 15 м/с. Он проходит мост за 2 мин. Определите длину моста.
1) 335 м
2) 550 м
3) 1235 м
4) 1450 м
А3. Шарик скатывается по наклонному прямому желобу с постоянным ускорением, по модулю равным 2 м/с2. 3а 3 с скорость шарика увеличивается на
1) 1,5 км/ч
2) 5,4 км/ч
3) 6,0 км/ч
4) 21,6 км/ч
А4. Гору длиной 50 м лыжник прошел за 10 с, двигаясь с ускорением 0,4 м/с2. Чему равна скорость лыжника в начале и в конце горы?
1) 3 м/с и 6 м/с
2) 2 м/с и 8 м/с
3) 4 м/с и 7 м/с
4) 3 м/с и 7 м/с
А5. На рисунке приведен график зависимости проекции скорости тела от времени.
Проекция ускорения тела в интервале времени от 8 до 12 с представлена графиком
B1. Скорость материальной точки на пути 60 м увеличилась в 5 раз за 10 с. Определите ускорение тела, считая его постоянным.
В2. На поверхность диска с центром в точке О нанесли две точки А и В (причем ОВ = ВА), и привели диск во вращение с постоянной линейной скоростью (см. рис.).
Как изменятся перечисленные в первом столбце физические величины при переходе от точки В к точке А?
Физические величины
А) угловая скорость
Б) период обращения по окружности
В) центростремительное ускорение
Их изменение
1) увеличится
2) уменьшится
3) не изменится
5 вариант
A1. Можно ли линейку принять за материальную точку?
1) Только при ее вращательном движении
2) Только при ее поступательном движении
3) Только при ее колебательном движении
4) Можно при любом ее движении
А2. Расход воды в канале за минуту составляет 16,2 м3 Ширина канала 1,5 м и глубина воды 0,6 м. Определите скорость воды.
1) 0,1 м/с
2) 0,2 м/с
3) 0,3 м/с
4) 18 м/с
А3. Легковой и грузовой автомобили одновременно начинают движение из состояния покоя. Ускорение легкового автомобиля в 4 раза больше, чем у грузового. Во сколько раз большую скорость разовьет легковой автомобиль за то же время?
1) В 2 раза
2) В 4 раза
3) В 8 раз
4) В 16 раз
А4. Скорость пули при вылете из ствола пистолета равна 250 м/с. Длина ствола 0,1 м. Определите примерно ускорение пули внутри ствола, если считать ее движение равноускоренным.
1) 312,5 км/с2
2) 114 км/с2
3) 1248 м/с2
4) 100 м/с2
А5. Тело, двигаясь вдоль оси ОХ прямолинейно и равноускоренно, за некоторое время уменьшило свою скорость в 2 раза. Какой из графиков зависимости проекции ускорения от времени соответствует такому движению?
B1. Аварийное торможение автомобиля заняло 4 с и происходило с постоянным ускорением 4 м/с2. Найдите тормозной путь.
В2. Два шкива разного радиуса соединены ременной передачей и приведены во вращательное движение (см. рис.).
Как изменяются перечисленные в первом столбце физические величины при переходе от точки А к точке В, если ремень не проскальзывает?
Физические величины
А) линейная скорость
Б) частота
В) угловая скорость
Их изменение
1) увеличится
2) уменьшится
3) не изменится
C1. Аэростат поднимается с Земли с ускорением 2 м/с2 вертикально вверх без начальной скорости. Через 10 с после начала движения из него выпал предмет. Определите, через какое время после своего падения предмет окажется на высоте 75 м относительно Земли?
Ответы на контрольную работу по теме Кинематика 10 класс
1 вариант
А1-3
А2-1
А3-1
А4-4
А5-1
В1-600 м/с
В2-312
С1-2880 м
2 вариант
А1-3
А2-3
А3-2
А4-3
А5-3
В1-1,5 м/с
В2-332
С1-480 м
3 вариант
А1-2
А2-3
А3-2
А4-3
А5-1
В1-1,35 м
В2-321
С1-40 с
4 вариант
А1-4
А2-4
А3-4
А4-4
А5-3
В1-0,8 м/с2
В2-331
С1-8,37 с
5 вариант
А1-2
А2-3
А3-2
А4-1
А5-4
В1-32 м
В2-322
С1-5 с
Кинематика циклического движения человека
Abstract
В литературе упоминаются два типа моделей, описывающих циклическое движение: теория и модели, управляемые данными. Теоретические модели включают анатомические и физиологические аспекты. Они в основном подходят для ответа на вопросы о причинах характеристик движения, но они сложны, и существенные упрощения не позволяют получить общепринятые результаты. Модели, управляемые данными, позволяют отвечать на конкретные вопросы, но не имеют понимания общей характеристики движения.В этой статье мы пытаемся найти компромисс, не полагаясь на анатомию, неврологию и функции мышц. Мы предполагаем, что общее кинематическое описание циклического движения человека возможно без необходимости указывать процессы, генерирующие движение, и все же получаем правильную кинематику. Предлагаемая модель состоит из суперпозиции шести вкладов — аттрактора объекта, морфинга, кратковременных флуктуаций, переходного эффекта, механизма управления и шума сенсора, при этом характеризуя числа и случайные вклады.Мы тестируем модель на данных бега на беговой дорожке и велотренажера. Применение модели в моделировании приводит к хорошему согласию между измеренными данными и значениями моделирования. Мы находим, что во всех наших случаях анализ сходства между измерением и моделированием лучше всего подходит для одних и тех же объектов — и. Все сравнения между разными предметами — это и. Это однозначно позволяет идентифицировать каждое измерение для соответствующего моделирования. Однако даже сравнения разных субъектов показывают хорошее совпадение результатов измерения и моделирования различий δ прогон = 6.7 ± 4,7% и δ велосипед = 5,1 ± 4,5%.
Образец цитирования: Vieten MM, Weich C (2020) Кинематика циклического движения человека. PLoS ONE 15 (3): e0225157. https://doi.org/10.1371/journal.pone.0225157
Редактор: Низам Уддин Ахамед, Университет Питтсбурга, США
Поступила: 2 ноября 2019 г .; Одобрена в печать: 17 февраля 2020 г .; Опубликовано: 5 марта 2020 г.
Авторские права: © 2020 Vieten, Weich.Это статья в открытом доступе, распространяемая в соответствии с условиями лицензии Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии указания автора и источника.
Доступность данных: Все файлы данных доступны на zenodo.org по прямой ссылке http://doi.org/10.5281/zenodo.3518415.
Финансирование: AFF-grand «Циклическое движение человека — 2019» Университета Констанца. Финансирующие организации не играли никакой роли в дизайне исследования, сборе и анализе данных, принятии решения о публикации или подготовке рукописи.
Конкурирующие интересы: Авторы заявили об отсутствии конкурирующих интересов.
Введение
Двуногая походка, особенно ходьба, была самым решающим достижением homo sapiens, превзошедшим своих предков и родственников [1]. В прошлые века появились и другие циклические движения, такие как плавание, езда на велосипеде, гребля или катание на лыжах, для преодоления естественных препятствий, облегчения путешествий, а затем в качестве досуга. В последнее время описания циклических движений служат биологическими шаблонами для разработок в области робототехники вместе с разработками в области искусственного интеллекта [2].Хотя в повседневной жизни циклические движения выполняются в тысячу раз каждый день, их основная композиция и структура до конца не изучены.
Кинематика циклического движения человека на первый взгляд кажется довольно простой. Подробные наблюдения показывают повторяющуюся структуру и некоторые колебания, вызывающие похожие, но не идентичные повторяющиеся циклы движений [3, 4]. Эти изменения часто описывают переходный эффект в начале движения [4–6], который обычно наблюдается в динамических системах [7, 8].Более того, различные возмущения изменяют регулярность выполняемого движения и динамику времени шага [9–12]. Дингвелл и Канг [13] описывают эти результаты как «врожденный биологический шум», представляющий собой локальную нестабильность [14] во время таких движений, как ходьба, не вызывая падений или спотыканий, что означает, что субъекты двигаются «орбитально стабильно». Нашнер [15] указал, что описанная непрерывность после возмущений сохраняется за счет корректировки параметров текущего шагающего движения, а не набора нового двигательного паттерна (стр.650).
Современные количественные научные попытки понять механизм, лежащий в основе черты центрального движения, начались еще в девятнадцатом веке [16]. Чаще всего описание циклического движения осуществляется по выбранным конкретным маркерам тела и отображению их координат как функции времени [17]. Классические параметры походки, такие как длина шага, частота шагов, скорость, а также отслеживание маркеров от систем оцифровки, несут большую часть рассматриваемой информации. С появлением прямого измерения ускорения для описания циклического движения может использоваться дополнительная и более тонкая информация, которую невозможно предоставить объяснением координат.Однако данные координат, по крайней мере, в принципе, могут быть сгенерированы из данных ускорения путем двух последовательных интегрирований по времени. Однако интеграция — это сглаживающий процесс, из которого становится очевидным, что важная информация теряется.
По этой причине мы предлагаем математическую модель кинематики циклического движения человека , основанную на данных ускорения. Это позволяет моделировать циклическое движение и сравнивать с измеренными данными. Мы проиллюстрируем эту модель как суперпозицию шести математических терминов, описывающих движение как (1) аттрактор предельного цикла, (2) индивидуальный морфинг аттрактора, (3) кратковременные случайные колебания в форме «случайного блуждания», (4) переходный эффект, описывающий начальные колебания вокруг аттрактора в начале активности, стихающие с увеличением времени, (5) процесс управления, активируемый, когда изменения шага имеют тенденцию выходить за границы измененных аттракторов, и (6) влияние шума, создаваемого измерительный прибор — акселерометры.Таким образом, эта модель позволяет расширить ранее сделанные выводы, в частности, об изменчивости циклических движений субъектов с их фиксированными и случайными компонентами.
Существует два типа моделей, описывающих циклическое движение человека, — модели, управляемые теорией и управляемые данными [18], — обе со своими сильными и слабыми сторонами. Например, модель, основанная на теории, описанная Герритсеном и др. [19] дает представление о работе семи групп мышц нижних конечностей. Необходимость сохранения управляемости модели в упомянутой статье с использованием 2-мерной модели твердого тела приводит к отклонениям от фактического движения.С другой стороны, модель Janssen et al. [18] смог обнаружить влияние эмоций на характер движений. Они применили глубокое машинное обучение с использованием искусственных нейронных сетей, что позволило идентифицировать тонкие эффекты. Хотя здесь хорошо достигается обнаружение характеристик движения, вызванного эмоциями, особенности изменения походки остаются невыявленными. В данной статье мы пытаемся найти компромисс, не полагаясь на анатомию и функцию мышц, но все же пытаясь количественно понять кинематические процессы и характер движения.Исследование езды на велосипеде при двух различных выходных мощностях (150 Вт и 300 Вт) при частоте вращения педалей 90 об / мин [20] обнаружило различия в мышечной активности, обнаруженной с помощью ЭМГ, в то время как кинематические данные остались почти неизменными. Этот результат вместе со стабильностью аттрактора человека с течением времени и после реабилитации [21, 22] является мотивацией для изучения возможности количественного описания движения без знания мышечной активности.
Целью данной статьи является точное определение кинематики циклического движения путем установления необходимых математических уравнений, которые позволяют моделировать.Представленный метод позволяет определять константы движений конкретного субъекта. Тестирование модели и метода проводится на двух классических циклических движениях: беге (на беговой дорожке) и (стационарной) езде на велосипеде.
Метод
Первый раздел «Модель» этого параграфа посвящен деталям нашей модели. Шесть составляющих условий указаны с их детерминированными и вероятностными компонентами. В разделе «Характеристические константы модели» мы покажем, как рассчитывается δM , среднее расстояние между двумя аттракторами, и как этот параметр позволяет определять характеристические константы модели.Чтобы увидеть, как измерения вписываются в модель, раздел «Обработка данных» устанавливает связь между необработанными данными ускорения и конкретным входным форматом для модели. Одна из наших целей состоит в том, чтобы количественно оценить сходство / несходство аттрактора по сравнению с другим аттрактором, на который не влияет временный эффект и морфинг, превращающий один аттрактор в другой. Такой аттрактор мы называем суператтрактором. Его конструкция приведена в разделе «Суператтрактор» и используется в разделе «Анализ подобия» для количественной оценки того, насколько похож суператтрактор по сравнению с протестированным.В разделе «Разделение переходного эффекта формы морфинга» суператтрактор снова используется для достижения разделения. В разделе «Моделирование» указываются некоторые настройки и дается ссылка в Интернете на используемые компьютерные приложения. Наконец, представлена необходимая информация о «Субъектах», «Оборудовании», «Беговых данных» и «Велосипедных данных».
Модель
Мы строим полное ускорение как суперпозицию шести членов
(1)
- Предельный цикл- Трактор , модель постоянного ускорения повторяется с каждым циклом.
- аттрактор M орфирование, допускающее незначительные отклонения от фактических значений аттрактора.
- кратковременное F колебание в форме «случайного блуждания».
- T Резкий эффект, который может присутствовать в начале и быстро уменьшается.
- C Управляющий механизм, срабатывающий, когда фактическое ускорение слишком сильно отклоняется от измененного аттрактора.
- N Шум, вызванный акселерометрами.
1.Аттрактор предельного цикла можно рассматривать как среднее значение всех циклов. Однако это идеализированное определение, которое не может быть полностью выполнено, так как это потребовало бы усреднения бесконечного числа циклов. Вместо этого мы аппроксимируем аттрактор конечным числом циклов, которое для последующих примеров мы выбрали количество полных циклов в пределах указанной минуты сбора данных.
(2) представляет собой замкнутую линию в трехмерном пространстве ускорения с измеренным ускорением, а j — количество последовательных точек данных в аттракторе.Такой приближенный аттрактор характерен для каждого человека [21, 22]. Фактический расчет начинается с разделения каждого набора данных на одноминутные участки и вычисления аттракторов [23]. Однако есть одно важное методологическое отличие. Вместо добавления циклов, которые имеют разное количество точек данных во временном порядке, мы описываем каждый цикл как состоящий из фиксированной точки данных номер n. Это достигается за счет сплайн-аппроксимации. Число n обозначает среднее количество точек данных всех полных циклов в пределах одноминутного интервала.Итак, мы рассматриваем каждый цикл как продолжающийся идентичный интервал времени, равный средней продолжительности цикла. После этого мы складываем все значения цикла для каждой из n точек и делим их на количество циклов. Результаты представляют собой средние значения одноминутных наборов данных, сохраняющих исходную частоту выборки, но все же содержащих влияние морфинга, случайного блуждания, переходного эффекта и механизма управления. Набор данных, на который меньше всего влияет, служит аттрактором для сравнения со всеми остальными. Подходящими аттракторами являются те, для которых время t ≫ t T (переходное время, поясняется ниже).
2. Зависящее от времени изменение индивидуального аттрактора описывается как изменение аттрактора от начала t S до конца t E поминутно. Уравнение имеет эвристический характер. Он должен быть способен описывать изменения данного аттрактора и его развитие до конечного аттрактора как функцию времени. Мы позаботимся об этом процессе, взяв приближения аттракторов в начале и в конце и описав преобразование двух приближений аттракторов, введя три безразмерные константы a 0 , a 1 , a 2 , по (3)
Важно отметить: морфинг невелик по сравнению с различиями аттракторов между особями.
3. Колебания в форме «случайного блуждания». Это изменения вокруг трансформированного аттрактора, описываемого итерацией (4)
Здесь l — номер данных. Аберрация от аттрактора может произойти в любом направлении. Мы описываем это с помощью углов ϑ и φ . Их фактические значения случайны и имеют равномерное распределение на сфере с полярным и азимутальным углами: (5)
RU [ α , β ] представляет собой случайную генерацию с однородной характеристикой в интервале [ α , β ].При таком определении стандартное отклонение случайного блуждания зависит от частоты дискретизации f S . Поскольку случайное блуждание не должно зависеть от специфики измерения — частоты дискретизации f S -, мы вводим параметр ϕ (сила случайного блуждания), который не меняется с частотой дискретизации. (6)
Коэффициент 10 6 введен для удобства. Для моделирования движения необходимо выбрать ϕ вместе с (см. Ниже), чтобы воспроизвести статистический разброс данных вокруг аттрактора.
4. Управляющий механизм C , соответственно компонент вектора C k ( t ), срабатывает, когда расстояние до преобразованных координат аттрактора пересекает границу b k (7) в точке аттрактора j . Здесь b — управляющая константа, а σ k ( j ) — стандартное отклонение аттрактора, деленное на среднее значение отклонения аттрактора 〈 σ k 〉.Это учитывает изменяющуюся ширину пучка ускорений. Поправочный член, активируемый в момент времени t b , моделируется как (8)
Со знаком (…) является знаком, а Θ (…) — ступенчатой функцией. Мы устанавливаем максимальное изменение ускорения равным τ = 80 мс аналогично стилю своевременной реакции мышцы [24] с эффективным продолжением ускорения т M = 4⋅ τ = 320 мс , чтобы получить (9) b k — это ускорение, необходимое для точного возврата к измененным значениям аттрактора.Это верно для (10)
RN [1, σ M ] ( t ) представляет собой нормально распределенный случайный элемент, вносящий некоторое отклонение от идеального рабочего механизма управления.
5. Переходный эффект — это временные колебания вокруг аттрактора в начале циклического движения. Начальное значение колебания может быть очень индивидуальным, специфичным для объекта, а часть начального значения возникает случайно.Мы моделируем отклонение как решение затухающего гармонического осциллятора, где переходный член можно рассматривать как отклонение от преобразованного аттрактора. (11) при этом среднее время одного цикла в одноминутном интервале Δ t . δ h — фаза, которая в моделировании выбирается случайным образом и представляет собой любое число от нуля до 2 π . h определяет количество вносящих вклад гармоник, причем m является самой высокой.Максимальная гармоника определяется преобразованием Фурье движения объекта. t T обозначает время уменьшения переходного эффекта до e -1 . Переходный эффект, усредненный за n -ю минуту, равен (12)
Здесь и далее ∥ обозначает часть вектора, указывающую в направлении объединенных векторов, а ⊥ обозначает части вектора, перпендикулярные взаимному направлению.
6.При моделировании кинематики и сравнении ее с реальными данными нам необходимо включить ошибку измерения — шум, вызванный характеристиками датчика. Его можно получить непосредственно путем измерения выходных сигналов датчиков в состоянии покоя. Сигнал акселерометра после вычитания значений, вызванных гравитационным полем Земли, моделируется как белый шум.
(13)Здесь RN обозначает случайный нормально распределенный вклад со средним значением и стандартным отклонением σ Sensor , который является характеристикой конкретного датчика. ϑ s и φ s выбираются случайным образом, чтобы получить равномерное распределение на уникальной сфере. σ Датчик рассчитывается по формуле (13) и на основе записи данных датчиков в состоянии покоя.
Характеристические константы модели
Основной параметр проверки достоверности модели — δM . Это среднее расстояние между двумя наборами данных [23], которое рассчитывается с использованием уравнения (1) по формуле (14)
Здесь по определению аттрактора как идентичного в любом цикле.Колебания вместе с поправочным членом действительно имеют почти идентичные усредненные вклады, близкие к нулю в разные одноминутные интервалы времени. Вклады шума почти полностью исчезают в течение одной минуты из-за его нормального распределенного характера, имеющего нулевое среднее значение. Следовательно, остающийся вклад поступает от переходного эффекта и морфинга аттрактора. Мы можем вычислить длину трех постоянных векторов. Остальные члены — это параллельные вклады, все лежащие в одном направлении в данный момент времени, которые можно записать в виде суммы скаляров.Последующее уравнение позволяет нам записать δM в зависимости от 5 констант T ∥ , t T , a 0 , a 1 , a 2 , которые задаются аппроксимацией кривых измерений. Мы используем программное обеспечение CurveExpert Professional 2.6.5, которое использует алгоритм Левенберга-Марквардта, обеспечивающий нелинейную аппроксимацию кривой. В то время как три константы справа описывают сугубо индивидуальный морфинг, зависящий от предмета и задачи, две константы слева аппроксимируют переходные колебания, вносящие вклад в δM в начале циклического движения. t T показывает время, пока колебания не уменьшатся до исходного значения T . Колебание незначительно, если t T ≥ t E (время измерения), поскольку две экспоненциальные функции почти равны 1, что приводит к сокращению этих членов. Значения морфинга и переходного эффекта смешиваются, что не позволяет разделить эти два эффекта во всех случаях.К счастью, есть способ разделить эти два эффекта, который будет объяснен ниже. Всего у нас есть девять констант, определяющих нашу модель. Все определения и соответствующие расчеты / приближения даны для моделирования циклического движения с помощью аттракторов и констант, полученных из данных измерений. Эти модели, естественно, не идентичны исходным данным, поскольку алгоритм содержит вклады случайных процессов.
Обработка данных
Поскольку для дальнейшего анализа потребовалось разделить собранный 60-минутный блок данных на 60-секундные интервалы, для создания подходящих отдельных наборов данных был применен разделитель файлов.Текстовый файл с необработанными данными содержал тринадцать столбцов: время и ускорение, а также данные гирометра в направлениях x, y и z для левой и правой ноги соответственно. Впоследствии приложение под названием «Аттрактор», запрограммированное с помощью MATLAB, использовалось для вычисления данных аттрактора для каждого одноминутного набора данных. Каждый набор данных аттрактора содержал 25 точек данных, нормированных по скорости / каденции xn: t, x левая ступня, y левая ступня, z левая ступня, x правая ступня, y правая ступня , z правая ступня , их стандартные отклонения, стандартные ошибки и данные гироскопа.Функциональность приложения «Аттрактор» основана на методе аттрактора, разработанном Vieten et al. [23] с изменением описанного выше процесса построения аттрактора. Аттракторы были нормализованы по скорости при беге и каденции (нормировочный коэффициент v = частота вращения педалей / 10) для езды на велосипеде.
Супер аттрактор
Суператтрактор — это по определению среднее значение всех аттракторов одного субъекта, за исключением любых аттракторов, которые следует сравнивать с суператтрактором.Кроме того, не учитывается аттрактор, на который влияет переходный эффект (обычно рассчитываемый по данным первых 10 минут измерения). В частности, для этого исследования суператтрактор был рассчитан для каждого участника из набора последних 50 минут каждого прогона независимо от данных, которые необходимо проанализировать.
Анализ сходства
Для этой процедуры каждый аттрактор пересчитывается, имея 500 точек данных, путем регулировки частоты дискретизации с использованием сплайн-аппроксимации.Чтобы выяснить, насколько похожи два движения, мы рассчитали горизонт распознавания вокруг каждой отдельной точки аттрактора, который определяется как площадь поверхности на расстоянии, равном пяти стандартным отклонениям от точки аттрактора. Тестовый аттрактор проверяется от точки к точке, если он находится внутри или за пределами горизонта распознавания первого аттрактора с использованием другой процедуры MATLAB (рис. 1).
Каждую измеренную или смоделированную минуту на протяжении всех сеансов бега или езды на велосипеде (5 x 60 минут) сравнивали с соответствующим суператтрактором .Коэффициент сходства определяется как процент точек данных, лежащих в пределах горизонта распознавания .
Отделение переходного эффекта от морфинга
Чтобы максимально исключить влияние морфинга, мы рассчитали суператтрактор из 5 независимых 1-часовых прогонов каждого индивидуума, выполненных примерно за 5 месяцев до фактических измерений для прогона. Для езды на велосипеде, поскольку у нас не было данных за несколько месяцев до этого, суператтрактор был создан из четырех наборов данных для сравнения с пятым.Поскольку наша гипотеза заключалась в том, что аттрактор стабилен только в заданном интервале, суператтрактор представляет только одну возможную конфигурацию аттрактора. Важно отметить, что эти суператтракторов не зависят от 60-минутных наборов данных, которые необходимо изучить. Следовательно, за исключением первых минут, на которые влияет переходный эффект, сравнение не должно сильно отличаться. И, наконец, δM можно аппроксимировать следующим образом: (15)
Как и раньше, константы аппроксимируются с помощью алгоритма Левенберга-Марквардта с помощью программного обеспечения CurveExpert Professional 2.6.5. Здесь c 0 представляет силу морфинга. c 1 — это линейное изменение, и ожидается, что оно будет очень маленьким, поскольку расстояние между суператтрактором и аттракторами измерения должно иметь очень небольшое изменение, за исключением случаев, когда переходный эффект активен. Последний c 2 обозначает силу переходного эффекта.
Симуляторы
Для моделирования мы создали приложение «TrackSimulator» (доступно по адресу http: // www.uni-konstanz.de/FuF/SportWiss/vieten/CyclicMove/), доступный в версиях для Windows и macOS. Он был создан в MATLAB и доступен как автономное решение без необходимости установки программы MATLAB. Приложение включает в себя все описанные выше алгоритмы. Для моделирования аттракторы испытуемых и их девять индивидуальных констант ϕ t E t T t A T ∥ ba ba 0 a 1 a 2 служат в качестве входных данных для приложения.Мы устанавливаем количество гармоник = 2 в уравнении (11), потому что эти гармоники составляют большую часть силы сигнала. Использование фазы измерения в моделировании даст хорошее соответствие между измерением и моделированием. Однако наша первоочередная задача — узнать об изменчивости циклических движений. Поэтому фаза переходного эффекта была выбрана случайным образом.
Субъекты
Летом 2019 года были протестированы десять спортсменов, шесть женщин и четыре мужчины.Данные о беге (n = 5) были собраны в Кройцлингене, Швейцария (Nationale Elitesportschule Thurgau), тогда как измерения на велосипеде (n = 5) проводились в Университете Констанца, Германия. Все бегуны были активными опытными спортсменами-любителями. Никто не получил травм, которые могли бы помешать их выступлениям. Велосипедистов набирали из числа студентов местных университетов. Единственными предварительными условиями были возраст от 18 лет и старше и способность бегать 60 минут без снижения первоначального темпа или езда на велосипеде с умеренной мощностью в течение 60 минут в зависимости от возраста, веса и уровня подготовки [25], соответственно.Всем участникам было предложено заполнить и подписать информированное согласие. Исследование было одобрено местным этическим комитетом Университета Констанца, Германия, под номером IRB19KN10-005.
Оборудование
Для сбора необходимых необработанных данных акселерометра два инерциальных датчика (RehaWatch от Hasomed, Магдебург, Германия) были прикреплены к обеим лодыжкам с помощью застежки-липучки во время пробежек; и на проксимальной фронтальной части большеберцовой кости (facies medialis) во время тестов на велосипеде.Датчики, MEMS — микроэлектромеханическая система, имеют размер 60x35x15 мм и вес 35 г каждый. Они функционируют как трехосный акселерометр, который мы настроили на интервал измерения ± 8 g , и трехосный гироскоп с диапазоном измерения до 2000 ° / с . Частота дискретизации была установлена на 500 Гц. Ускорение стоп измерялось в трех измерениях (x, y, z) с сохранением данных на смартфон (Samsung Galaxy J5) с помощью приложения RehaGait Version 1.3.9, запрограммированного Hasomed (Магдебург, Германия).Все пробежки выполнялись на беговой дорожке (9500HR от Life Fitness, Унтершлайсхайм, Германия). Велосипедные измерения проводились на велоэргометре (ergoselect200, Ergoline, Bitz, Германия).
Рабочие данные
Первая тренировка началась с короткой 5-минутной фазы разминки, чтобы познакомиться с беговой дорожкой и определить легкий темп бега по шкале BORG, равной 3 [26] (Таблица 1).
Выбранная скорость бега оставалась стабильной на протяжении всех последующих тестовых сессий продолжительностью 60 минут каждая.Участвующие спортсмены повторили протокол тестирования в течение примерно четырех недель, состоящих из пяти дней тестирования, разделенных как минимум 24 часами. Измерения были получены от трехосных акселерометров с помощью смартфона, размещенного на столе рядом с беговой дорожкой, чтобы обеспечить беспрепятственный прием. Перед фактическим бегом участники настраивают беговую дорожку с наклоном 1% (для имитации сопротивления ветра) и своей индивидуальной скоростью, ожидая на дополнительной площадке для стояния рядом с полотном беговой дорожки.Как только выбранная скорость ремня была достигнута, тестер отсчитывал от трех до одного перед началом сбора данных на смартфоне. В то же время бегун запрыгнул на беговое полотно и сразу же начал бег в выбранном темпе в течение 60 минут. Это прыжковое движение, длящееся примерно одну секунду, было вырезано из данных во время процесса управления данными, так как это движение не относилось к конкретному бегу.
Данные о велосипеде
В течение четырех недель все велосипедисты пять раз повторили протокол тестирования.Перед первым днем испытаний исследовательская группа рассчитала мощность и выбрала подходящее положение сиденья. Все участники были протестированы с их предпочтительной частотой вращения (об / мин = повторений в минуту), которую участники могли удерживать в интервале ± 3 об / мин в течение 60 минут. Их выходная мощность соответствовала легкой тренировке на выносливость и определялась с учетом возраста, веса и уровня подготовки спортсменов [25] (Таблица 2).
В каждый день испытаний велосипедисты регулировали сиденье и руль, как было определено.Ассистент-исследователь посоветовал спортсмену сохранять положение сидя и каденс как можно более стабильно. Сбор данных был начат тестером сразу после того, как сигнал старта заставил участника крутить педали.
Результаты
Все входные данные, данные измерений и результаты моделирования имели частоту дискретизации 500 Гц. Дальнейшие процедуры, включая построение графиков, были выполнены после фильтрации с помощью «тройного F-фильтра нижних частот» [27] с частотой среза 10 Гц.
Для моделирования мы использовали константы, взятые из измерений, показанных ниже.Продолжительность моделирования t E = 60 мин была идентична времени измерения. Сила случайного блуждания была установлена ϕ = 100, а управляющая константа — b = 5.
Графическое сравнение измерения и моделирования дает первое впечатление о мощности модели (рис. 2).
Из измерения δM мы получаем пять констант T ∥ , t T , a 0 , a 1 , a 6 2.Они зависят от предмета и от конкретного движения. Для наших измерений находим интервалы Таблицы 3.
Показатели сходства между измерениями и моделированием действительно показывают различия. Это ожидаемо, поскольку наша модель, помимо детерминированных частей, также имеет случайные компоненты. Здесь важно то, что анализ сходства для бега дает разрыв между 50 и 56%, четко отделяя одно и то же от сравнения разных субъектов (рис. 3). Все сравнения измерений или моделирования между одними и теми же объектами находятся выше разрыва, сравнения между разными объектами — ниже.
Для езды на велосипеде существует такая же ситуация с разрывом от 52 до 64 (рис. 4), четко отделяющим одно и то же от сравнения разных субъектов. Как и раньше, все сравнения одних и тех же субъектов лежат выше разрыва, сравнения различных субъектов — ниже.
Значения δM –Eq (14) –– подвержены влиянию морфинга и переходного эффекта. Типичная прогрессия с обоими факторами, влияющими на δM ( t ), показана на рис. 5. В первые несколько минут переходный эффект вызывает увеличение / уменьшение, в то время как впоследствии виден морфинг с его более умеренным снижением.Различия между измерением (синий) и моделированием (красный) вызваны переходным эффектом и «кратковременными колебаниями». Здесь начальные условия в значительной степени случайны, вызывая различия в начале.
Разница между измерением и моделированием вызвана переходным эффектом и «кратковременными колебаниями». Здесь начальные условия в значительной степени случайны, вызывая различия в начале. Преобразование конкретного измерения запечатлевается в значениях моделирования с помощью уравнения (3).Эффект морфинга виден, если анализируемые минуты относятся к одному непрерывному измерению. Сравнение с суператтрактором , вычисленным на основе данных, не зависящих от фактических чисел, показывает случайные изменения и переходный эффект, но не морфинг (рис. 6). Эти данные можно аппроксимировать с помощью уравнения (15), которое позволяет рассчитать переходный эффект в значительной степени без влияния морфинга. δM не сильно меняется с единственным заметным отклонением в начале и примерно до 10 -й минуты.
На рис. 6 показано значение δM ( t ) для пяти прогонов по субъекту 3, репрезентативно, где отчетливо виден существенный переходный эффект. Другие субъекты, особенно велосипедисты, вначале демонстрируют меньше или совсем не демонстрируют экспоненциального поведения. В таблице 4 показано время t T в минутах до тех пор, пока эффект переходного процесса (TE) не стабилизируется до e -1 от своего начального значения. В среднем это занимает 4,3 минуты, исключая случаи без переходного эффекта.
Абсолютная высота δM зависит от сходства аттрактора по сравнению с независимым суператтрактором . Следующие ниже графики, прогоны (рис. 7) и велотренажеры (рис. 8) показывают среднее значение и стандартное отклонение δM для всех испытуемых. Расчеты основаны на минутах от 11 до 60 без учета данных, на которые влияет переходный эффект. Следовательно, эти значения являются прямой мерой морфинга. Для спуска δM находится в диапазоне от 2 до 5 м / с 2 .При езде на велосипеде отображаются значения от 7 до 14 м / с 2 за одним исключением поразительно низкого значения δM около 1–1,4 м / с 2 для объекта 10.
Обсуждение
Целью данной статьи было найти количественное описание циклического движения с возможностью моделирования характерных движений человека. Была предложена модель, состоящая из шести участвующих частей. Индивидуальный аттрактор, морфинг, кратковременная флуктуация, переходный эффект, механизм управления и шум сенсора.Моделирование, основанное на этой модели, показало те же отличительные изменения, что и измеренные данные. Во всех случаях анализ сходства одних и тех же субъектов давал более высокие результаты — и — по сравнению с различными комбинациями субъектов — и. Измерения соответствующих имитаций четко идентифицируются, что подтверждает пригодность модели для описания циклического движения. Девять констант вместе с приближениями аттрактора объекта характерны для движения человека и влияния регистрирующих датчиков.
Как известно из предыдущих исследований [21, 22], влияние морфинга и временного эффекта мало по сравнению с различиями между индивидуумами. Хотя морфинг присутствует во всех испытаниях, временный эффект наблюдается не во всех случаях (20 из 25 случаев для бега, 8 из 25 случаев для езды на велосипеде). При езде на велосипеде переходный эффект менее заметен по сравнению с бегом. Мы подозреваем фиксацию ног, когда ступня соединена с педалью, а бедро очень сильно зафиксировано на седле, что ограничивает свободу в изменении движений.Положение большеберцовой кости и связанное с ней ускорение часто с самого начала определяется аттрактором. Иная ситуация наблюдается при беге, когда кинематическая цепь не фиксируется рядом с местом расположения акселерометра на дистальном конце большеберцовой кости. Здесь вероятность начать движение вблизи аттрактора объекта, не приводящее к видимому переходному эффекту, мала. Интересно, что самые опытные бегуны демонстрируют наименьший кратковременный эффект.
Сравнение аттракторов испытуемого за 1 час измерения с независимым суператтрактором позволяет приблизительно оценить величину морфинга.Максимальное отличие аттракторов от независимых измерений одного объекта ограничено максимально возможным морфингом. Морфинг может деформировать аттрактор множеством различных способов, что, скорее всего, приведет к δM сопоставимых значений. Следовательно, результаты, показанные на рисунках 7 и 8, могут представлять хорошее приближение типичных величин морфинга. Тем не менее, определение аттрактора остается сложной задачей. В математических системах, таких как знаменитое «отображение Лоренца», аттрактор достигается после ослабления переходного эффекта.Там либо достигается устойчивый регулярный аттрактор, либо виден странный. Здесь, хотя данные о циклическом движении никогда полностью не достигают регулярности, поведение также не является полностью хаотичным. Регулярность, как упоминалось ранее, достаточно хороша, чтобы различать людей.
По-прежнему остается вопрос, как оценить различия аттракторов, когда приближения аттракторов вычисляются путем усреднения циклов разных временных интервалов. Означает ли это просто, что при усреднении за более длительные периоды времени эти различия почти полностью исчезнут? Или это означает, что аттракторы меняются со временем, даже если эти изменения небольшие? Пока что у нас недостаточно данных, чтобы однозначно ответить на этот вопрос.Однако, исходя из приведенных выше результатов, мы предполагаем, что второе утверждение более вероятно. Это утверждение также имеет теоретический аргумент. При разработке математического описания циклического движения наш первый подход не подвергался морфингу. Идея заключалась в том, чтобы иметь аттрактор, не зависящий от времени, и флуктуацию, основанную только на характеристике «случайного блуждания». Однако эта конструкция не позволяла описать полную изменчивость данных.
С точки зрения науки о спорте, основные компоненты модели представляют особый интерес в циклических видах спорта, таких как бег, езда на велосипеде, плавание или гребля.В более ранней работе сообщается о различиях в изменении моделей бега по конкретным предметам во время длительных занятий, таких как марафонский бег [28]. Последние авторы утверждают, что соревнующиеся бегуны демонстрируют большую последовательность своих движений в зависимости от предмета по сравнению с их противниками-любителями, чьи характеристики походки становятся значительно нетипичными в середине забега. Далее Clermont et al. [29] продемонстрировали с помощью своего подхода способность различать подгруппы, зависящие от пола и уровня подготовки, на основе данных об ускорении.Спортсмен с большим опытом бега в сочетании с увеличенным пробегом обязательно выполняет большее количество шагов, что приводит к более имплантированной и эффективной схеме движений [30]. Таким образом, можно предположить, что продолжительность переходного эффекта заканчивается раньше в сочетании с меньшими отклонениями фактического аттрактора, вызванными эффектом морфинга. Если кратковременные ускорения по-прежнему отклоняются от измененного аттрактора, можно ожидать, что механизм управления сработает гораздо раньше у спортсменов с длительным стажем тренировок.Чтобы проверить указанные ожидания, необходимо провести дальнейшие прикладные исследования.
В целом наша модель способна количественно описывать циклическое движение. Учитывая приближение аттрактора человека и константы, специфичные для объекта, результат моделирования является специфическим для конкретного движения объекта. Кроме того, есть и другие аспекты, требующие дальнейшего внимания. Один из них устанавливает порог для анализа сходства, чтобы определить процент достижения распознавания.Множество других измерений конкретного циклического движения должны позволить определить подходящее число с использованием медианного метода, описанного Vieten et al. [23]. Другим ограничением текущего подхода является сосредоточение внимания на вычислении δM, которое зависит только от параллельных компонентов. Анализ полного выражения может помочь в более глубоком понимании.
Заключение
Эта статья представляет собой «доказательство концепции», показывающее, что циклическое движение может быть описано с помощью представленной математической модели. Более того, моделирование на основе разработанной модели способно генерировать числа, отображающие ту же структуру и поведение, что и измерения.Возможны приложения в области медицинской диагностики, оценки производительности, распознавания предметов и робототехники. Для диагностики наша группа ранее разработала и использовала шкалу утомляемости пациентов с рассеянным склерозом [31, 32]. Однако новая модель позволяет более точно описать переход между нормальным состоянием и состоянием утомляемости, учитывая морфинг. Что касается оценки производительности, результаты на рисунках 7 и 8 показывают, что величина морфинга различается в зависимости от конкретного объекта.Это может быть связано с уровнями работоспособности спортсменов, используя стабильные модели бега на протяжении длительных физических нагрузок. Кроме того, это может позволить глубже понять зависимости таких параметров, как пол, история тренировок и антропометрические атрибуты. Рисунки 3 и 4 — стрелки над разрывом — показывают с помощью коэффициента подобия, что можно найти комбинации измерения / моделирования, принадлежащие одному и тому же объекту. Этот факт и некоторые предварительные анализы предполагают, что распознавание объекта возможно через сравнение аттракторов.Здесь аттрактор измерения сравнивается с базой данных аттракторов. Наконец, движение двуногих роботов может извлечь выгоду из нашей модели, сравнивая конкретные значения характеристической константы, а также особую форму аттракторов между людьми и роботами.
Благодарности
Мы благодарим всех субъектов, принявших участие в исследовании.
Ссылки
- 1. Брамбл Д.М., Либерман Д.Е. Бег на выносливость и эволюция Homo.Природа. 2004. 432 (7015): 345–52. pmid: 15549097
- 2. Kerscher T. Entwicklung von Regelungsstrategien für elastisch angetriebene zweibeinige Laufmaschinen. Докторская диссертация, Karlsruher Institut für Technologie. 2010. Доступно по ссылке: http://dx.doi.org/10.5445/IR/1000019634
- 3. Уильямс ГП. Теория хаоса приручена. Вашингтон, округ Колумбия: Джозеф Генри Пресс; 1997. xvii, 499 p. п.
- 4.
Вейх К., Йенсен Р.Л., Витен М. Исследование перехода к триатлону: количественная оценка различий в модели беговых движений и точности после перехода на велосипедный бег.Спортивная биомех. 2019; 18 (2): 215–28. pmid: 2
06 - 5. Хурмузлу Ю. Динамика двуногой походки: Часть II — Анализ устойчивости плоского пятизвенного двуногого человека. Журнал прикладной механики. 1993. 60 (2): 337–43.
- 6. Хурмузлу Ю., Басдоган С. Об измерении динамической устойчивости передвижения человека. J Biomech Eng. 1994. 116 (1): 30–6. pmid: 8189711
- 7. Alligood KT, Sauer T, Yorke JA. Хаос: введение в динамические системы. Нью-Йорк: Спрингер; 1997 г.XVII, 603 с. п.
- 8. Strogatz SH. Нелинейная динамика и хаос: с приложениями к физике, биологии, химии и технике. Ридинг, Массачусетс: Эддисон-Уэсли Паб .; 1994. xi, 498 с. п.
- 9. England SA, Granata KP. Влияние скорости походки на локальную динамическую устойчивость ходьбы. Поза походки. 2007. 25 (2): 172–8. pmid: 16621565
- 10. Хаусдорф JM, Peng CK, Ladin Z, Wei JY, Goldberger AL. Ходьба — это случайная прогулка? Доказательства дальних корреляций в интервале шагов человеческой походки.J. Appl Physiol (1985). 1995. 78 (1): 349–58.
- 11. Хаусдорф Дж. М., Земани Л., Пэн С., Гольдбергер А. Л.. Созревание динамики походки: вариативность от шага к шагу и ее временная организация у детей. J. Appl Physiol (1985). 1999. 86 (3): 1040–7.
- 12. Спитцер Ф. Принципы случайного блуждания. 2-е изд. Нью-Йорк: Спрингер; 2001. xii, 408 с. п.
- 13. Дингвелл Дж. Б., Кан Х. Г.. Различия между локальной и орбитальной динамической устойчивостью при ходьбе человека.J Biomech Eng. 2007. 129 (4): 586–93. pmid: 17655480
- 14. Дингвелл Дж. Б., Кусумано Дж. П. Нелинейный анализ временных рядов нормальной и патологической ходьбы человека. Хаос. 2000. 10 (4): 848–63. pmid: 12779434
- 15. Нашнер Л.М. Регулировка баланса людей, нарушенных при ходьбе. J Neurophysiol. 1980. 44 (4): 650–64. pmid: 7431045
- 16. Аль-Захрани К.С., Бахейт МО. Исторический обзор анализа походки Ответ автора. Неврология. 2008; 13 (4): 460-.pmid: 21063384
- 17. Селе А., Мюндерманн А., Старрост К., Зайлер С., Бехер И., Деттмерс С. и др. Объективная оценка двигательной усталости при рассеянном склерозе с использованием кинематического анализа походки: пилотное исследование. Журнал нейроинжиниринга и реабилитации. 2011; 8 (1): 59.
- 18. Янссен Д., Шёлльхорн В.И., Любенецки Дж., Фёллинг К., Кокенге Х., Дэвидс К. Распознавание эмоций в паттернах походки с помощью искусственных нейронных сетей. J невербальное поведение. 2008; 32: 79–92.
- 19.Герритсен КГМ, ван ден Богерт А.Дж., Нигг Б.М. Прямое моделирование динамики фазы удара при беге с пятки на носок. Журнал биомеханики. 1995; 28: 661–8. pmid: 7601865
- 20. Эндерс Х., Фон Чарнер В., Нигг Б.М. Нервно-мышечные стратегии во время езды на велосипеде при различных мышечных нагрузках. Медицина и наука в спорте и физических упражнениях. 2015; 47 (7): 1450–9. pmid: 25380476
- 21. Broscheid KC, Dettmers C, Vieten M. Является ли аттрактор предельного цикла (почти) неизменной характеристикой ходьбы человека? Поза походки.2018; 63: 242–7. pmid: 29778064
- 22. Loske S, Nuesch C, Byrnes KS, Fiebig O, Scharen S, Mundermann A и др. Декомпрессионная операция улучшает качество походки у пациентов с симптоматическим стенозом поясничного отдела позвоночника. Spine J. 2018.
- 23. Vieten MM, Sehle A, Jensen RL. Новый подход к количественной оценке различий временных рядов данных о походке с использованием атрибутов аттрактора. PLoS One. 2013; 8 (8): e71824. pmid: 23951252
- 24. Бухталь Ф., Шмальбрух Х. Время сокращения и типы волокон в неповрежденной мышце человека.1970. 79 (4): 435–52.
- 25. Kindermann W. Ergometrie — Empfehlungen für die ärztliche Praxis. Deutsche Zeitschrift für Sportmedizin. 1987; 38 (6).
- 26. Уилсон Р.К., Джонс П.В. Сравнение визуальной аналоговой шкалы и модифицированной шкалы Борга для измерения одышки во время упражнений. Клиническая наука. 1989. 76 (3): 277–82. pmid: 29
- 27. Витен М.М., редактор Triple F (F3) Фильтрация данных Kinemaitc. ISBS 2004; 2004; Оттава, Канада: факультет медицинских наук Оттавского университета.
- 28. Clermont CA, Benson LC, Edwards WB, Hettinga BA, Ferber R. Новые соображения в отношении данных носимых технологий: изменения в биомеханике бега во время марафона. Журнал прикладной биомеханики. 2019: 1–9.
- 29.
Clermont CA, Benson LC, Osis ST, Kobsar D, Ferber R. Модели бега для мужчин и женщин, соревнующихся и бегунов-любителей, на основе данных акселерометра. Журнал спортивных наук. 2019; 37 (2): 204–11. pmid: 29
5 - 30. Барнс К.Р., Килдинг А.Е.Стратегии повышения экономичности бега. Спортивная медицина. 2015 (45 (1)): 37–56. pmid: 25164465
- 31. Селе А., Витен М., Мундерманн А., Деттмерс С. Разница в двигательной усталости между пациентами с инсультом и пациентами с рассеянным склерозом: пилотное исследование. Фронт Neurol. 2014; 5: 279. pmid: 25566183
- 32. Sehle A, Vieten M, Sailer S, Mundermann A, Dettmers C. Объективная оценка двигательной усталости при рассеянном склерозе: индекс усталости Kliniken Schmieder (FKS).J Neurol. 2014. 261 (9): 1752–62. pmid: 24952620
Уравнений движения для постоянного ускорения в одном измерении — College Physics
Мы могли бы знать, что чем больше ускорение, скажем, автомобиля, удаляющегося от знака «Стоп», тем больше смещение за заданное время. Но мы не разработали конкретное уравнение, связывающее ускорение и смещение. В этом разделе мы разработаем некоторые удобные уравнения для кинематических отношений, начиная с уже рассмотренных определений перемещения, скорости и ускорения.
Обозначение:
t , x , v , aВо-первых, сделаем несколько упрощений в обозначениях. Принятие начального времени равным нулю, как если бы время измерялось секундомером, является большим упрощением. Поскольку прошедшее время есть, взятие означает, что последнее время на секундомере. Когда начальное время принимается равным нулю, мы используем индекс 0 для обозначения начальных значений положения и скорости. То есть — это начальная позиция , а — начальная скорость .Мы не ставим индексы на окончательные значения. То есть — это последнее время , — это конечная позиция , а — это конечная скорость . Это дает более простое выражение для истекшего времени — сейчас,. Это также упрощает выражение для смещения, которое есть сейчас. Кроме того, это упрощает выражение для изменения скорости, которое есть сейчас. Подводя итог, используя упрощенные обозначения, с начальным временем, принятым равным нулю,
, где нижний индекс 0 обозначает начальное значение, а отсутствие нижнего индекса означает конечное значение в любом рассматриваемом движении.
Теперь мы делаем важное предположение, что ускорение постоянно . Это предположение позволяет нам избегать использования расчетов для определения мгновенного ускорения. Поскольку ускорение постоянно, среднее и мгновенное ускорения равны. То есть
, поэтому мы всегда используем символ ускорения. Предположение, что ускорение является постоянным, не серьезно ограничивает ситуации, которые мы можем изучить, и не ухудшает точность нашего лечения. Во-первых, ускорение постоянно равно в большом количестве ситуаций.Кроме того, во многих других ситуациях мы можем точно описать движение, приняв постоянное ускорение, равное среднему ускорению для этого движения. Наконец, в движениях, где ускорение резко меняется, например, когда автомобиль разгоняется до максимальной скорости, а затем тормозит до остановки, движение можно рассматривать в отдельных частях, каждая из которых имеет собственное постоянное ускорение.
Уравнение отражает тот факт, что при постоянном ускорении это просто среднее значение начальной и конечной скоростей.Например, если вы постоянно увеличиваете свою скорость (то есть с постоянным ускорением) с 30 до 60 км / ч, то ваша средняя скорость во время этого постоянного увеличения составляет 45 км / ч. Используя уравнение для проверки этого, мы видим, что
, что кажется логичным.
Расчет смещения: как далеко пробегает бегунок?
Бегун бежит по прямому участку дороги со средней скоростью 4,00 м / с в течение 2,00 мин. Какова его конечная позиция, если исходная позиция равна нулю?
Стратегия
Нарисуйте эскиз.
Конечная позиция определяется уравнением
Чтобы найти, мы идентифицируем значения, , и из постановки задачи и подставляем их в уравнение.
Решение
1. Определите известные. , , и .
2. Введите известные значения в уравнение.
Обсуждение
Скорость и конечное смещение положительны, что означает, что они направлены в одном направлении.
Уравнение дает представление о взаимосвязи между смещением, средней скоростью и временем. Это показывает, например, что перемещение является линейной функцией средней скорости. (Под линейной функцией мы подразумеваем, что смещение зависит от , а не от , возведенного в какую-либо другую степень, например, . На графике линейные функции выглядят как прямые линии с постоянным наклоном.) В поездке на автомобиле для Например, если мы усредним 90 км / ч, мы продвинемся вдвое дальше, чем если бы мы усреднили 45 км / ч.
Между смещением и средней скоростью существует линейная зависимость. В течение заданного времени объект, движущийся в два раза быстрее, чем другой объект, будет перемещаться вдвое дальше другого объекта.Расчет конечной скорости: самолет замедляется после приземления
Самолет приземляется с начальной скоростью 70,0 м / с, а затем замедляется на 40,0 с. Какова его конечная скорость?
Стратегия
Нарисуйте эскиз. Мы рисуем вектор ускорения в направлении, противоположном вектору скорости, потому что самолет замедляется.
Решение
1. Определите известные. ,,.
2. Определите неизвестное. В данном случае это конечная скорость .
3. Определите, какое уравнение использовать. Мы можем рассчитать конечную скорость, используя уравнение.
4. Подставьте известные значения и решите.
Обсуждение
Конечная скорость намного меньше начальной скорости, желательно при замедлении, но все же положительная. С помощью реактивных двигателей обратная тяга могла поддерживаться достаточно долго, чтобы остановить самолет и начать движение назад.На это указывает отрицательная конечная скорость, чего здесь нет.
Самолет приземляется с начальной скоростью 70,0 м / с и замедляется до конечной скорости 10,0 м / с, прежде чем направиться к терминалу. Обратите внимание, что ускорение отрицательное, потому что его направление противоположно его скорости, которая положительна.
Помимо того, что это уравнение полезно при решении проблем, оно дает нам представление о взаимосвязях между скоростью, ускорением и временем.Из него видно, например, что
- конечная скорость зависит от того, насколько велико ускорение и как долго оно длится
- , если ускорение равно нулю, то конечная скорость равна начальной скорости, как и ожидалось (т.е. скорость постоянна)
- , если отрицательно, то конечная скорость меньше начальной скорости
(Все эти наблюдения соответствуют нашей интуиции, и всегда полезно исследовать основные уравнения в свете нашей интуиции и опыта, чтобы убедиться, что они действительно точно описывают природу.)
Установление соединений: соединение в реальном мире
Космический шаттл Endeavour стартует из Космического центра Кеннеди в феврале 2010 г. (Источник: Мэтью Симантов, Flickr)
Межконтинентальная баллистическая ракета (МБР) имеет большее среднее ускорение, чем космический шаттл, и достигает большей скорости в первые две минуты полета (фактическое время горения межконтинентальной баллистической ракеты засекречено — ракеты с коротким временем горения сложнее для противника. разрушать).Но космический шаттл получает большую конечную скорость, так что он может вращаться вокруг Земли, а не сразу возвращаться вниз, как это делает межконтинентальная баллистическая ракета. Космический шаттл делает это за счет более длительного ускорения.
Что еще мы можем узнать, исследуя уравнение? Мы видим, что:
- смещение зависит от квадрата истекшего времени, когда ускорение не равно нулю. На (Рисунок) драгстер преодолевает только четверть общего расстояния за первую половину прошедшего времени
- , если ускорение равно нулю, то начальная скорость равна средней скорости () и становится
Расчет конечной скорости: драгстеры
Рассчитайте окончательную скорость драгстера (рисунок) без использования информации о времени.
Стратегия
Нарисуйте эскиз.
Уравнение идеально подходит для этой задачи, поскольку оно связывает скорости, ускорение и смещение и не требует информации о времени.
Решение
1. Определите известные значения. Мы знаем это, поскольку драгстер стартует из состояния покоя. Затем мы отмечаем, что (это был ответ на (Рисунок)). Наконец, было дано среднее ускорение.
2. Подставьте известные значения в уравнение и решите относительно
Таким образом,
Чтобы получить, извлекаем корень квадратный:
Обсуждение
145 м / с — это около 522 км / ч или около 324 миль / ч, но даже эта головокружительная скорость отстает от рекорда для четверти мили.Также обратите внимание, что квадратный корень имеет два значения; мы взяли положительное значение, чтобы указать скорость в том же направлении, что и ускорение.
Изучение уравнения может дать дальнейшее понимание общих соотношений между физическими величинами:
- Конечная скорость зависит от того, насколько велико ускорение и расстояние, на котором оно действует
- При фиксированном замедлении автомобиль, который едет вдвое быстрее, не просто останавливается на удвоенном расстоянии — для остановки требуется гораздо больше времени.(Вот почему у нас есть зоны с пониженной скоростью возле школ.)
Объединение уравнений
В следующих примерах мы дополнительно исследуем одномерное движение, но в ситуациях, требующих немного большего количества алгебраических манипуляций. Примеры также дают представление о методах решения проблем. В рамке ниже легко найти нужные уравнения.
Расчет смещения: как далеко уходит автомобиль при остановке?
На сухом бетоне автомобиль может замедляться со скоростью, тогда как на мокром бетоне он может замедляться только с.Найдите расстояния, необходимые для остановки автомобиля, движущегося со скоростью 30,0 м / с (около 110 км / ч) (а) по сухому бетону и (б) по мокрому бетону. (c) Повторите оба вычисления, найдя смещение от точки, где водитель видит, что светофор становится красным, принимая во внимание время его реакции 0,500 с, чтобы он нажал ногу на тормоз.
Стратегия
Нарисуйте эскиз.
Чтобы определить, какие уравнения лучше всего использовать, нам нужно перечислить все известные значения и точно определить, что нам нужно решить.Мы сделаем это явно в следующих нескольких примерах, используя таблицы для их выделения.
Решение для (а)
1. Определите, что мы знаем и что мы хотим решить. Мы знаем это ; ; (отрицательно, потому что направление противоположно скорости). Принимаем равным 0. Ищем смещение, или.
2. Найдите уравнение, которое поможет решить проблему. Лучшее уравнение для использования —
Это уравнение лучше всего, потому что оно включает только одно неизвестное,.Нам известны значения всех других переменных в этом уравнении. (Существуют и другие уравнения, которые позволят нам решить для, но они требуют, чтобы мы знали время остановки, которое мы не знаем. Мы могли бы использовать их, но это потребовало бы дополнительных вычислений.)
3. Перепишите уравнение, для которого нужно найти.
4. Введите известные значения.
Таким образом,
Решение для (b)
Эта часть может быть решена точно так же, как и Часть A. Единственная разница в том, что замедление есть.Результат —
Решение для (c)
После реакции водителя тормозной путь будет таким же, как в частях A и B для сухого и влажного бетона. Итак, чтобы ответить на этот вопрос, нам нужно вычислить, как далеко проехал автомобиль за время реакции, а затем добавить это время ко времени остановки. Разумно предположить, что скорость остается постоянной в течение времени реакции водителя.
1. Определите, что мы знаем и что мы хотим решить. Мы знаем это ; ; .Принимаем за 0. Ищем.
2. Определите лучшее уравнение для использования.
работает хорошо, потому что единственное неизвестное значение — это то, что мы хотим найти.
3. Подключите известные знания, чтобы решить уравнение.
Это означает, что автомобиль движется на 15,0 м, пока водитель реагирует, в результате чего общее смещение в двух случаях с сухим и мокрым бетоном на 15,0 м больше, чем при мгновенной реакции.
4. Добавьте смещение за время реакции к смещению при торможении.
- 64,3 м + 15,0 м = 79,3 м в сухом виде
- 90,0 м + 15,0 м = 105 м во влажном состоянии
Расстояние, необходимое для остановки автомобиля, сильно различается в зависимости от дорожных условий и времени реакции водителя. Здесь показаны значения тормозного пути для сухого и мокрого покрытия, рассчитанные в этом примере для автомобиля, изначально движущегося со скоростью 30,0 м / с. Также показаны общие расстояния, пройденные от точки, где водитель впервые видит красный свет, при условии, что время реакции составляет 0,500 с.
Обсуждение
Смещения, найденные в этом примере, кажутся разумными для остановки быстро движущегося автомобиля. Остановка автомобиля на мокром асфальте займет больше времени, чем на сухом. Интересно, что время реакции значительно увеличивает смещения. Но важнее общий подход к решению проблем. Мы идентифицируем известные и определяемые величины, а затем находим соответствующее уравнение. Часто есть несколько способов решить проблему.Фактически, различные части этого примера могут быть решены другими методами, но решения, представленные выше, являются самыми короткими.
Расчет времени: автомобиль вливается в движение
Предположим, автомобиль выезжает на автомагистраль на съезде длиной 200 м. Если его начальная скорость составляет 10,0 м / с, а скорость ускоряется, сколько времени потребуется, чтобы преодолеть 200 м по рампе? (Такая информация может быть полезна транспортному инженеру.)
Стратегия
Нарисуйте эскиз.
Нас просят решить на время.Как и раньше, мы идентифицируем известные величины, чтобы выбрать удобную физическую связь (то есть уравнение с одной неизвестной,).
Решение
1. Определите, что мы знаем и что мы хотим решить. Мы знаем это ; ; и .
2. Нам нужно решить проблему. Выберите лучшее уравнение. работает лучше всего, потому что единственное неизвестное в уравнении — это переменная, для которой нам нужно решить.
3. Нам нужно будет изменить уравнение, для которого нужно найти.В этом случае будет проще сначала подключить известные.
4. Упростите уравнение. Единицы измерения (м) отменяются, потому что они есть в каждом члене. Мы можем получить единицы секунд, которые нужно отменить, взяв, где — величина времени, а s — единица измерения. Остается
5. Используйте формулу корней квадратного уравнения, чтобы найти .
(a) Переставьте уравнение, чтобы получить 0 на одной стороне уравнения.
Это квадратное уравнение вида
, где указаны константы.
(b) Его решения даются квадратной формулой:
Это дает два решения для
В этом случае время равно в секундах или
Отрицательное значение времени неразумно, так как это будет означать, что событие произошло за 20 секунд до начала движения. Мы можем отказаться от этого решения. Таким образом,
Обсуждение
Каждый раз, когда уравнение содержит неизвестный квадрат, будет два решения.В некоторых проблемах имеют смысл оба решения, но в других, таких как вышеупомянутое, разумно только одно решение. Ответ 10,0 с кажется разумным для типичной автострады на съезде.
Освоив основы кинематики, мы можем перейти ко многим другим интересным примерам и приложениям. В процессе разработки кинематики мы также увидели общий подход к решению проблем, который дает как правильные ответы, так и понимание физических взаимоотношений. В разделе «Основы решения проблем» обсуждаются основы решения проблем и описывается подход, который поможет вам добиться успеха в этой бесценной задаче.
Установление связей: эксперимент на вынос — последние новости
Мы использовали единицы СИ — метры в секунду в квадрате, чтобы описать некоторые примеры ускорения или замедления автомобилей, бегунов и поездов. Чтобы лучше понять эти числа, можно измерить замедление при торможении автомобиля, выполняющего медленную (и безопасную) остановку. Напомним, что для среднего ускорения. Путешествуя в машине, медленно нажимайте на тормоза, когда подойдете к знаку остановки. Попросите пассажира записать начальную скорость в милях в час и время, необходимое (в секундах) для остановки.Отсюда рассчитайте замедление в милях в час в секунду. Преобразуйте это в метры на секунду в квадрате и сравните с другими замедлениями, упомянутыми в этой главе. Рассчитайте пройденное расстояние при торможении.
Проверьте свое понимание
Ракета во время запуска ускоряется. Сколько времени нужно, чтобы ракета достигла скорости 400 м / с?
Зависимая от направления кинематика руки обеспечивает оптимальную интеграцию гравитационных сигналов
[…]
Рецензент № 1:
[…]
Это исследование продолжает серию опубликованных авторами прекрасных статей о влиянии гравитоинерционных ограничений на сенсомоторные процессы.В нем рассматривается важный вопрос, связанный с интеграцией силы тяжести во время двигательных действий, и обеспечивается значительный прогресс по сравнению с предыдущими исследованиями. Однако статью можно легко улучшить, внеся некоторые изменения.
Проблема в том, что другие опубликованные статьи, некоторые из которых упоминаются в рукописи, предоставили убедительные доказательства в пользу гипотезы компенсации. К сожалению, авторы не объясняют, почему более ранние доказательства гипотезы компенсации менее убедительны, чем их.Они своего рода «вбили мяч в касание», просто заявив, что «появление теории оптимального управления поставило под сомнение этот более традиционный взгляд на управление двигателем». Возможно, это было сделано на добровольной основе, потому что критика, даже если она ведет к прогрессу, не всегда приветствуется. Однако, поскольку целью исследования было «явное различие между гипотезами компенсации и оптимизации», обсуждение проблем, связанных с гипотезой компенсации, должно быть более подробным.Несмотря на очень хорошие результаты, без такого обсуждения влияние настоящей статьи будет ослаблено.
Мы изменили обсуждение, чтобы ответить на этот комментарий. Мы заявляем: «Несмотря на то, что такая гипотеза о компенсации имеет большое значение, она не получила количественной поддержки. Напротив, другие исследования, которые количественно оценивали профили скорости, показали, что временная организация кинематики руки показывает небольшую, но последовательную зависимость от направления движения, скорости и нагрузки (Gaveau et al., 2014, Гаво и Папаксантис, 2011, Папаксантис и др., 1998b). Более того, результаты, несовместимые с гипотезой компенсации (например, отрицательная фазовая активность ЭМГ во время вертикальных движений рук; Flanders et al., 1996), были проигнорированы »(параграф 5 обсуждения). Предыдущие исследования, которые пытались количественно подтвердить гипотезу компенсации, показали сложные результаты, которые не были оценены количественно с альтернативными гипотезами. Таким образом, игнорировались даже результаты, противоречащие гипотезе компенсации.Недавнее применение теории оптимального управления к биологическому движению позволило улучшить количественную оценку и интерпретацию сложных наборов данных, включая представление о том, что двигательная адаптация соответствует процессу повторной оптимизации, приводящему к измененным траекториям.
Стиль письма улучшится от сглаживания. В настоящее время слишком много длинных предложений, многие из них прерываются длинными списками ссылок, которые иногда мешают пониманию.
Мы постарались сделать письмо более плавным по всей бумаге.
Рецензент № 2:
Авторы представляют интересное свидетельство гравитационного воздействия на односуставные движения человека. Зависимость от направления от земли и приобретенная потеря зависимости при повторном параболическом полете существенны и новы. Эта работа имеет значение для того, как на мозг обычно (на земле) и гибко (через параболический полет) влияет сила тяжести.
Однако предлагаемые конкретные аналитические, теоретические и гипотезы содержат несколько недостаточно проработанных и противоречивых элементов, вызывающих серьезную озабоченность.Что касается общей гипотезы, главное беспокойство вызывает уверенность в том, что эти результаты подтверждают модель «минимального плавного усилия». Авторы предпочитают цитировать статьи, которые развивают модель полностью, а не делают это здесь; это большой недостаток, так как читатель не может даже рассмотреть предложенную гипотезу.
Мы благодарим рецензента за указание на это. В отредактированной рукописи мы более тщательно разработали раздел «Моделирование», чтобы читатель мог легко следовать логике, которая предоставляется со всеми необходимыми материалами для воспроизведения моделирования.Увеличена длина раздела «Симуляторы». Более конкретные замечания по моделированию рассматриваются в следующих комментариях.
Повсюду предполагается, что в «усилии» преобладают силы (в данном случае гравитация) (например, «Поведенческий признак оптимальной интеграции гипотезы гравитации…»). Предлагаемые уравнения, однако, показывают, что рывок — чисто кинематическая мера. , входит в авторскую модель. Анализ чувствительности, показанный только в обсуждении, очень неполный, так как он исследует рассчитанную стоимость только с одной стороны от выбранного коэффициента.Мой лучший вывод состоит в том, что включение рывков имеет решающее значение, и даже самое щедрое прочтение работы завершается синтезом, что и кинематика, и динамика важны в нынешнем поведении.
Интуиция рецензента не соответствует действительности. Рисунок 1 — дополнение к рисунку 2 показывает, что асимметрия постепенно уменьшается по мере увеличения относительного веса рывка по сравнению с усилием. Этой демонстрации достаточно по следующей причине: при решении задачи оптимального управления функция стоимости определяется с точностью до положительного скалярного множителя.Точнее, если минимизировать некоторую функцию
f (x) = b ∗ g (x) + c ∗ h (x).
решение x будет таким же, как если бы оно минимизировалось
f (x) / d = b / d ∗ g (x) + c / d ∗ h (x).
для любого d> 0. Следовательно, мы можем нормализовать нашу функцию затрат, установив b = d, тем самым приняв единичный коэффициент перед абсолютной составляющей работы в нашем случае. Варьирования нашего уникального весового коэффициента достаточно, чтобы исследовать два крайних случая, а именно только рывок и только абсолютную работу.Когда весовой коэффициент равен нулю (или на практике очень мал), мы минимизируем только абсолютную работу. Когда весовой коэффициент бесконечен (или на практике очень велик), мы минимизируем только рывок. Следовательно, нашего анализа чувствительности достаточно, чтобы продемонстрировать, что способность модели плавного усилия предсказывать сигмоидальный эффект направления на SR возникает только из-за части затрат, связанных с усилиями. Теперь мы ясно объясним этот момент в подразделе «Моделирование».
Некоторые другие элементы анализа, моделирования и интерпретации вызывают озабоченность.
— Представленная модель плавного усилия включает отдельные термины для крутящих моментов, создаваемых агонистами и антагонистами. У авторов нет возможности их измерить; они измеряют только кинематику; несомненно, на земле и абсолютно в полете соударение будет. Таким образом, центральные переменные в их модели неизмеримы.
Поскольку мы измеряем только кинематику, мы действительно не можем измерить участие мышц-агонистов и антагонистов в движении руки; мы можем только сделать вывод о чистом крутящем моменте.Однако, поскольку крутящие моменты агониста и антагониста противоположны, а угловая скорость сохраняет постоянный знак (например, неотрицательный для восходящего движения), минимизация абсолютной работы мышечного крутящего момента при одновременном разделении крутящего момента агониста и антагониста или нет (работа с чистым крутящим моментом напрямую) эквивалентно: это не влияет на прогноз модели минимального плавного усилия. Мы уже показали это в предыдущей статье (Berret et al. 2008, PLoS Comp Biol). Это логический результат, поскольку в обоих случаях минимизация абсолютной работы сил приведет к политике управления, которая производит как можно меньшее совместное сжатие.Разделение моментов агонистов и антагонистов было бы интересно проверить эффект введения некоторой мышечной динамики (как мы дополнительно сделали для модели минимальной дисперсии, см. Ниже), однако, чтобы позволить значимую интерпретацию наших результатов и уменьшить количество неизвестных / настраиваемых параметров, мы использовали простейшую модель минимального плавного усилия без какой-либо динамики мышечных сокращений. При этом предсказанные направленные асимметрии можно с уверенностью отнести к законам физики, т.е.е. эффекты гравитации, а не конкретную мышечную динамику, которую мы бы реализовали. Соответственно, в новой версии рукописи мы переписали уравнения модели только с учетом крутящего момента (см. Уравнения 4, 5 и 6). Мы благодарим рецензента за это конструктивное замечание, поскольку оно позволяет более просто интерпретировать наши результаты.
— Абсолютные плоские линии, рассчитанные на основе гипотез о минимальном изменении крутящего момента и минимальной дисперсии (рис. 1F), весьма сомнительны. Аналогичная работа (на самом деле источник этих теорий) предполагает, что нагрузка должна играть важную роль.Чтобы оправдать этот очень противоречивый результат, необходимо гораздо больше подробностей о вычислении этих функций затрат. Модель минимальной дисперсии, в частности, требует такого уровня нейронной активации (драйва), который, по-видимому, полностью отсутствует в данном рассмотрении.
Модель минимальной дисперсии основана на принципе, что некоторый зависящий от сигнала шум — мультипликативный шум, который масштабируется с уровнем мышечного сокращения (нет постоянного шума, потому что продолжительность здесь определена априори) — искажает паттерны мышечной активации и, следовательно, точность конечной точки. .В нашей первоначальной версии рукописи мы упоминали, что наши симуляции включают шум, зависящий от сигнала, однако наше описание модели минимальной дисперсии было очень кратким и даже не определяло управляющую переменную. Ниже мы предоставляем необходимую информацию, чтобы доказать эффективность наших расчетов с минимальной дисперсией.
Мы воспользовались исследованием Танаки и его соавторов (2004, Neural Computation, статья, сообщенная Дэниелом Вольпертом), где авторы сравнили прогнозы моделей минимальной дисперсии и минимального изменения крутящего момента для моноартикулярных движений руки, выполняемых в различных условиях. длительности движения и внешних силовых полей.Во-первых, в соответствии с нашими результатами, Танака и его коллеги обнаружили, что модель минимального изменения крутящего момента предсказывает профили скорости, которые всегда симметричны (т.е. коэффициент симметрии = 0,5). Во-вторых, минимальная дисперсия была найдена для предсказания соотношений симметрии, которые увеличивались с увеличением продолжительности движения и уменьшались с увеличением степени устойчивости системы (когда движения выполнялись в гибридных вязких и упругих силовых полях).
На изображении ответа автора 1 ниже представлены результаты нашего собственного эквивалентного моделирования.Доказывая обоснованность нашей формулировки минимальной дисперсии, можно заметить, что наше моделирование воспроизводит оба ранее описанных эффекта (см. Танака и др. 2004, рисунки 2 и 3).
Учитывая влияние гибридных вязких и упругих силовых полей на СТО, мы понимаем удивление рецензента по поводу нашего результата инвариантного СТО, предсказанного минимальной дисперсией при изменении направления движения в гравитационном поле. Однако гравитационное поле сильно отличается от гибридного вязкого и упругого силового поля Танаки и др.(2004) в том смысле, что степень устойчивости системы не меняется с направлением движения. Шум, зависящий от сигнала (то есть дисперсия), накапливаясь с мышечными сокращениями, отвечающими за ускорение и замедление движения, фактически достигает постоянного конечного уровня для всех направлений движения в поле силы тяжести (для заданной продолжительности и стабильности системы). В результате профили скорости, количественно определяемые SR, одинаковы во всех направлениях. Это согласованный результат, поскольку минимальная дисперсия отрицательно сказывается на больших мышечных моментах, которые были бы необходимы для воспроизведения наших экспериментальных результатов; я.е. короткий SR при движении вверх (требующий сильного ускорения против силы тяжести и, следовательно, высокий уровень шума) и длинный SR при движении вниз (требующий сильного замедления против силы тяжести и, следовательно, высокого шума).
В отредактированной рукописи мы предоставили дополнительные сведения о методах, относящиеся к моделированию минимальной дисперсии. Теперь читатель должен понять, что наша формулировка модели минимальной дисперсии аналогична предыдущим исследованиям (подразделы «Моделирование»). Мы также добавили моделирование, показывающее, что включение некоторой простой динамики мышц (превращение крутящего момента мышцы в низкочастотную версию управляющего сигнала) в задачу оптимального управления (как это было выполнено Harris and Wolpert, 1999) не изменило выводов, сделанных на основе данные представлены в основном тексте (см. подраздел «Моделирование» и рисунок 1 — приложение к рисунку 3).Обратите внимание, что Tanaka et al. (2004) также сообщили, что включение динамики мышц в их моделирование не повлияло на выводы их анализа.
Дополнительное моделирование, проверяющее достоверность наших расчетов с минимальной дисперсией по сравнению с ранее опубликованными результатами Tanaka et al. 2004 г.
( A ) Нормализованные профили скорости, полученные для различной продолжительности движения.( B ) Показано, что коэффициент симметрии увеличивается с увеличением продолжительности движения ( C ) Нормализованные профили скорости, полученные для различных степеней устойчивости системы. Самая правая кривая соответствует случаю отсутствия внешней силы. Остальные четыре кривые, справа налево, относятся к критической системе демпфирования с повышенной стабильностью за счет внешних сил вязкости и упругости (см. Tanaka et al. 2004). ( D ) Было показано, что коэффициент симметрии уменьшается при увеличении уровня силового поля.
https://doi.org/10.7554/eLife.16394.011— Пассажиры, пристегнутые ремнями в полете, явно понимают, что гравитация очень сильна, отсутствует и снова сильна. Представление о том, что привязка не приведет к получению информации до движения, досадно. Точно так же идея о том, что гипергравитация для тех, кто не стеснен, не имеет эффекта обучения, является необычной.
Наше обоснование заключалось в том, что запрещение испытуемым выполнять произвольные движения (когда они были привязаны к полу и между фазами 0G для не привязанного вниз предмета) позволило бы снизить сенсомоторную адаптацию за счет предотвращения моторного взаимодействия с различными нежелательными гравитационными движениями. инерционные силовые поля.Мы заметили, что субъекты аналогичным образом адаптировались по параболам независимо от того, начали ли они эксперимент в начале полета или ждали, привязанные к полу (как указано в подразделе рукописи «Эксперимент 2»). Таким образом, эти результаты демонстрируют эффективность экспериментальной парадигмы параболического полета для ответа на наш вопрос. В измененной рукописи мы заменили «избегать» на «сокращать» в том же разделе. Мы также добавили дополнительный рисунок (рисунок 3 — рисунок в приложении 1), позволяющий читателю сравнивать результаты 1-го и 2-го испытуемых каждого полета.Кроме того, дисперсионный анализ Крускала-Уоллиса по рангам не выявил каких-либо различий между двумя группами (испытуемые, сдавшие 1-е или 2-е место).
— Авторы предоставляют скудную информацию о том, как они рассчитали только биомеханику задачи. Значимое количественное рассмотрение кинематики в сравнении с динамикой требует здесь дополнительной информации.
Мы обновили рисунок 1 — приложение к рисунку 1A, чтобы предоставить полную информацию о том, как можно вычислить момент силы тяжести (уравнение 1) на основе кинематики рычага.Мы ссылаемся на это в рукописи: «Геометрическая иллюстрация механической системы вместе с подробностями о том, как вывести уравнение 1, показаны на рисунке 1 — добавлении к рисунку 1».
В целом авторы показали, что в вертикальной плоскости направление цели на земле играет роль в управлении траекторией движения человека; что в ранних полетах существует асимметрия профилей скорости; а в более поздних полетах эта асимметрия исчезнет. Все это указывает на простой вывод: мозг может использовать динамику гравитации, чтобы влиять на траекторию движения.Все дальнейшие выводы, сделанные из рукописи, имеют недостаточно развитые доказательства и, следовательно, оказывают очень нечеткое влияние на область моторного контроля и нейронных вычислений.
Мы надеемся, что рецензент найдет, что исправленная статья решает его опасения и поддерживает наш вывод о том, что мозг оптимизирует механические эффекты гравитации, чтобы минимизировать усилия при движении. Мы считаем, что это важное открытие, которое может иметь серьезные последствия в таких разнообразных областях, как нейрореабилитация, восприятие движений или модульность управления моторикой, которые по большей части основаны на принципе компенсации (Prange et al.2009; Prange et al. 2012; Кук и др., 2013; Руссо и др. 2012).
Рецензент № 3:
[…]
Проблемы существа
1) Небольшой эффект в ограниченной области двигательного поведения. Рассматриваемый эффект представляет собой относительно тонкую асимметрию в профиле скорости, которая согласуется с использованием гравитационного момента в восходящей и нисходящей фазах движения. Хотя данные согласуются с постулируемой функцией стоимости, аргумент об эволюционном преимуществе, похоже, не соответствует небольшому размеру описанного эффекта.Возможно, влияние на движения более высоких измерений будет более существенным.
Поскольку человеческие мышцы имеют временные ограничения относительно их способности производить силу (Винтерс Дж. М. и Старк Л., IEEE Trans Biomed Eng, 1985; Zajac FE, Crit Rev Biomed Eng, 1989), нельзя ожидать, что SR изменится слишком резко. Хотя максимальная разница между восходящим и нисходящим SR невелика, все испытуемые показали аналогичную тенденцию (рис. 2B), а статистическая значимость была высокой.
Хотя это выходит за рамки данной статьи, но для примера более существенных эффектов в движении в более высоких измерениях, пожалуйста, смотрите предварительные результаты, представленные на изображении ответа автора 2 (поясняется ниже).
В настоящем исследовании мы сосредоточились на движениях рук с одной степенью свободы (таким образом, на форме профиля скорости), чтобы изолировать эффекты гравитации. Предыдущие исследования, однако, выявили аналогичные эффекты направления движения (вверх / вниз) как на пространственные, так и на временные аспекты движений с разной степенью свободы с разной скоростью и амплитудой, для руки и всего тела (сидеть, чтобы стоять, а не стоять, чтобы сидеть). движения (Papaxanthis et al., 2005, Yamamoto and Kushiro, 2014, Papaxanthis et al., 2003, Papaxanthis et al., 1998c). Важно отметить, что минимизация усилия движения в гравитационном поле может объяснить эти различия (Беррет и др., 2008; Гаво и др., 2011, 2014).
Поскольку результаты в текущем исследовании были очень значительными и поскольку предыдущие исследования выявили аналогичные эффекты в различных областях моторного поведения, мы считаем разумным предположить, что универсальность моторного планирования в гравитационном поле является результатом эволюции и / или развития. преимущество для моторной экономии.Этот аргумент развит в разделе «Обсуждение». Теперь мы заменили «аргументировать» на «предлагать» и добавили «и / или развитие».
2) Модель не опровергает оптимизацию минимального рывка, но сочетает ее с оптимизацией работы против силы тяжести. Модель плавности была предложена для плоских горизонтальных движений, на которые не влияет сила тяжести. В этом отношении модель Гаво и его коллег не кажется «альтернативой» модели минимального рывка, но расширением случаев, в которых также играет роль гравитация.
Мы остановимся на этом в конце обсуждения. Важно отметить, что для горизонтальных движений наша модель делает прогнозы, которые близки, но не в точности равны прогнозам модели минимального рывка. Например, поскольку часть усилия нашей модели зависит от крутящего момента, прогноз модели Smooth-Effort в горизонтальной плоскости изменяется с антропометрическими характеристиками каждого объекта (само меняет уровень инерционного крутящего момента). В общем, прогноз модели Smooth-Effort будет меняться с требованием крутящего момента движения, в то время как прогноз минимального рывка не изменится.Следовательно, если моменты взаимодействия (для движений рук с несколькими степенями свободы) или дополнительные внешние моменты (создаваемые, например, роботизированным манипулятором) испытываются в горизонтальной плоскости, минимальное плавное усилие и минимальное рывковое движение могут предсказать очень разные решения. Теперь это упоминается в методах разработки моделей (см. Подраздел «Моделирование»).
На самом деле, мы собрали предварительные данные для проверки этой гипотезы: испытуемые выполняют 60 разносуставных движений рук (все суставы свободны; движения, выполняемые между классическими наборами двух целей; i.е. начальная и конечная) в горизонтальной плоскости, управляя роботом-манипулятором, применяя внешнюю вспомогательную, резистивную силу или силу без нее к руке испытуемого. Изображение ответа автора 2 показывает стабилизированную производительность (среднее значение последних 30 испытаний, + SD) для первых трех субъектов, которые выполнили этот эксперимент. Поразительно, что временная организация движения дотягивания адаптирована таким образом, что коэффициенты симметрии меньше для резистивных (таких же, как движение вверх в текущей статье) и больше для вспомогательных (таких же, как движение вниз в текущей статье) по сравнению с условием отсутствия силы ( аналогично горизонтальному в данной статье).
Таким образом, хотя мы согласны с тем, что текущая версия модели минимального плавного усилия не опровергает оптимизацию минимального рывка, поскольку она сочетает минимальный рывок с затратами усилий, мы полагаем, что наша модель распространяется не только на случаи, в которых сила тяжести вступает в игру, но на самом деле представляет собой обобщение, которое объясняет, как динамика задачи влияет на кинематику движения.
Коэффициенты симметрии (среднее значение 30 испытаний, + SD), полученные для трех субъектов, выполняющих быстрые движения с вытягиванием рук в горизонтальной плоскости при трех условиях внешней силы.
Вспомогательный: манипуландум толкает руку к конечной цели. Нет силы: манипуландум не оказывает никакой силы. Сопротивление: манипуландум толкает руку к стартовой цели. Амплитуда движения 30 см, длительность 300 мс.
https://doi.org/10.7554/eLife.16394.012В том же духе я нашел не совсем убедительным и немного искусственным предлагаемый контраст между внутренними моделями и оптимальным контролем.Фактически, внутренние модели можно рассматривать в рамках оптимального управления, поскольку они позволяют прогнозировать последствия моторных команд (прямые модели) и формировать различные оптимальные решения некорректно поставленных обратных задач. То, что авторы рассматривают как кинематические компенсации (т.е. формирование траекторий минимального рывка или минимального изменения крутящего момента), не следует описывать как альтернативу оптимизации, поскольку они также являются формами оптимизации.
Мы не собирались противопоставлять внутренние модели оптимальному контролю.Мы полностью согласны с рецензентом о необходимости учета внутренних моделей в рамках оптимального управления. Теперь мы изменили Введение и представили две противоположные гипотезы (компенсация против оптимизации усилий), обе в рамках оптимального управления. В обоих случаях мы явно заявляем, что внутренняя модель гравитации принесет пользу той или иной стратегии, позволяя предвидеть эффекты гравитации.
3) Альтернатива между «компенсацией» и «оптимизацией» не ясна, поскольку компенсация часто описывается (или описывается) как оптимизация.
Текст изменен во избежание путаницы. Мы используем оптимальную структуру управления, чтобы разделить две альтернативные гипотезы о том, как мозг использует внутреннюю гравитационную модель при планировании движений рук, то есть мы используем различные критерии минимизации для моделирования политик управления, которые компенсируют или оптимизируют механические эффекты гравитации. Чисто кинематическая оптимизация (например, минимальный рывок) должна учитывать эффекты гравитации, чтобы компенсировать их и, следовательно, получить желаемую траекторию (наиболее плавную).С другой стороны, критерий оптимизации, который учитывает динамику движения, будет использовать эффекты гравитации для создания траекторий, удовлетворяющих желаемой минимизации: дисперсия конечных точек, мышечное усилие или что-то еще. Поэтому в этом исследовании мы сравниваем кинематические и динамические затраты, чтобы устранить неоднозначность гипотезы компенсации и оптимизации гравитационных эффектов. Затем мы сравниваем прогнозы различных динамических затрат, чтобы подчеркнуть важность усилий в двигательном планировании (усилие в сравнении с отклонением или изменением крутящего момента).
Мы понимаем, что противопоставление модели оптимального управления (минимального рывка) гипотезе «оптимизации» гравитационных эффектов было непонятным. Для ясности в новой версии рукописи мы заменили название «гипотеза оптимизации» на «гипотеза оптимизации усилий». Кроме того, в разделе «Введение» и «Результаты» мы прямо заявляем, что используем модели оптимального управления для иллюстрации компенсации гравитационного воздействия и оптимизации гравитационного воздействия (то есть гипотезы оптимизации усилий).
4) «Зависимость SR от направления движения (т.е. от момента силы тяжести) является уникальной особенностью оптимизации, связанной с усилиями». Есть доказательства этому? Может ли какая-то похожая зависимость быть результатом другого представления координат (например, min-jerk, выраженный в угловых координатах)?
Среди различных моделей, смоделированных для проверки того, могут ли они воспроизвести кинематическую асимметрию в вертикальной плоскости, удались только модели, которые минимизировали затраты, связанные с усилиями (Berret et al.2008а, б; Crevecoeur et al. 2009; Gaveau et al. 2014). Более того, в предыдущих исследованиях (Berret et al., 2008a, b) подход обратного оптимального управления математически продемонстрировал, что наличие критерия, связанного с усилиями, в функции затрат является необходимым и достаточным условием для получения кратковременной временной инактивации мышц, близкой к пик скорости, который вызывает наблюдаемую кинематическую асимметрию относительно направления движения. Мы четко оговариваем это в отредактированной рукописи.Кроме того, прямое моделирование оптимального управления подтвердило, что другие затраты, такие как интегралы квадрата изменения крутящего момента, крутящего момента и рывка (декартова или угловая), не могут последовательно воспроизводить устойчивую эмпирическую асимметрию вверх / вниз. Что касается использования различных представлений координат, декартово и угловое идентичны для движения с одной степенью свободы. Этот последний пункт был добавлен в подраздел «Моделирование» рукописи.
[Примечание редакции: до принятия были запрошены дополнительные исправления, как описано ниже.]
[…]
Рецензент № 2:
Авторы должным образом рассмотрели несколько проблем. Рукопись теперь более полно определяет нынешнюю модель плавных усилий, что упрощает понимание всей аргументации. Дополнительные результаты моделирования, включая демонстрацию модели изменения крутящего момента, генерирующей различные соотношения симметрии при различной продолжительности и нагрузке, обнадеживают.
Здесь есть два конкурирующих соображения в отношении рукописи в целом.
1) Связь между теорией и экспериментом на рисунках 1E и 2C действительно предполагает, что «усилие», вероятно, играет роль в асимметрии движений. Постепенное уменьшение этой асимметрии в параболическом полете предполагает, что различные условия окружающей среды приводят к изменению нервного контроля. В целом, это действительно продвигает область и дает интересную информацию.
Благодарим рецензента за положительные комментарии.
2) Остается несколько проблем.Даже с дополнительным исследованием собственной реализации модели изменения крутящего момента, абсолютная плоскостность результатов модели на Рисунке 1F кажется нереальной. Авторы могли бы привести гораздо более убедительный аргумент: они могли бы пересчитать данные оси Y (экспериментальное симметричное соотношение) в зависимости от расчетного изменения крутящего момента. Если этот экспериментальный результат будет таким же плоским на 1F, это будет убедительно. Если нет, то авторам необходимо пересмотреть уникальность своей модели при объяснении результата.
Рецензента все еще не убедили наши имитации модели минимального изменения крутящего момента.Мы хотели бы подчеркнуть, что другие авторы (Tanaka et al. 2004) также продемонстрировали, что оптимизация изменения крутящего момента предсказывает постоянные профили скорости (то есть отношения симметрии) для различных условий движения (изменение ориентации, скорости и т. Д.). Чтобы прояснить этот результат, мы приводим в конце ответного письма формальную демонстрацию того, что модель изменения крутящего момента не предсказывает различные соотношения симметрии.
В ходе наших исследований мы задавали себе вопрос, почему другие модели не учитывают изменения отношения симметрии как функцию направления движения.Рецензент просит построить график зависимости экспериментального симметричного отношения от расчетного изменения крутящего момента, полученного из экспериментальных профилей скорости (если мы правильно поняли), не поможет. Корреляционные переменные, которые не являются результатом предсказания модели, не подходят для проверки того, может ли теоретическая модель (здесь модель изменения крутящего момента) объяснить наши экспериментальные данные или нет; т.е. пересмотреть уникальность нашей модели при объяснении экспериментальных результатов. Это только покажет, что изменение крутящего момента (рассчитанное на основе экспериментальных данных) коррелирует с кинематикой рычага.Это не означает, что вариации изменения крутящего момента являются оптимальными и, следовательно, соответствуют принципу планирования, что и является целью нашего исследования. Наша формальная демонстрация ниже, наряду с моделированиями, представленными в рукописи, и предыдущими результатами, опубликованными Tanaka et al. (2004) доказывают, что прогнозы изменения крутящего момента «плоские».
Гораздо большее беспокойство вызывает пересмотр модели с минимальной дисперсией. Уравнение 10 устраняет любую угловую зависимость от силы тяжести. Этот шаг, кажется, предотвращает какой-либо значимый результат их исследования того, как угол влияет на контроль.
Уравнение 10 не устраняет полностью угловую зависимость от силы тяжести. Действительно, есть две разные угловые зависимости относительно силы тяжести: одна от ориентации плоскости движения (в нашей рукописи) и одна от изменяющейся во времени амплитуды движения (𝜃 в нашей рукописи). Работа крутящего момента силы тяжести (как показано на рисунке 1B) охватывает обе эти угловые зависимости.
Уравнение 10 устраняет угловую зависимость только от амплитуды движения; то есть модуляция прогнозируемого момента силы тяжести (PGT), которая наблюдается между = 0 ° и 𝜃 = 45 ° от каждого графика на рисунке 1 — приложение к рисунку 1 (панель B).Однако функция косинуса изменяется от 1,0 до 0,7 на этом интервале, и ожидается, что это не эта относительно небольшая вариация будет учитывать значения отношения симметрии. На самом деле гораздо важнее влияние ориентации плоскости движения. Это проиллюстрировано на Рисунке 1 — добавлении к рисунку 1 (панель B), где можно увидеть, что угловая зависимость PGT от амплитуды движения в основном касается движений, выполняемых в вертикальных плоскостях движения (𝛾> 45 ° 𝑎𝑛𝑑 𝛾 <-45 °). Для других плоскостей движения (𝛾> 45 ° 𝑎𝑛𝑑 𝛾 <-45 °) практически отсутствует модуляция PGT через амплитуду движения.Средняя (по 17 целям) модуляция PGT, которой мы пренебрегаем с помощью уравнения 10, равна 11,88% (1,42 Нм в среднем) от PGT, испытываемого на исходной цели. Для сравнения, изменение ориентации движения с восходящего (= 90 °) на нисходящее (𝛾 = -90 °) приводит к 200% -ной модуляции PGT. Важно отметить, что уравнение 10 не пренебрегает этой угловой зависимостью ориентации плоскости от силы тяжести. Изображение ответа автора 3A показывает, как мало влияет приближение, данное в уравнении 10, на работу крутящего момента силы тяжести, экспериментально изменяемого параметра в нашей парадигме движения с одним шарниром.Важно отметить, что в нашем эксперименте основной эффект гравитации связан с ориентацией плоскости движения (заданной углом 𝛾), а не с изменяющейся во времени амплитудой движения 𝜃.
Чтобы дополнительно проиллюстрировать этот эффект на моделирование оптимального управления, мы также представляем результаты двух наборов имитаций, выполненных с помощью модели Smooth-Effort в случае, когда мы пренебрегаем угловым эффектом амплитуды движения (как в уравнении 10 для модели дисперсии). и в том случае, когда мы не пренебрегаем угловым эффектом амплитуды движения (изображение ответа автора 3B).Можно понять, что это приближение не меняет качественно результатов; т.е. коэффициент симметрии по-прежнему линейно коррелирует с работой момента силы тяжести. В заключение, аппроксимация уравнения 10 не устраняет основную угловую зависимость от силы тяжести, т. Е. В соответствии с плоскостью движения, и различия между результатами, полученными с помощью моделей Smooth-Effort и Variance, не могут быть отнесены на счет сделанного приближения. в уравнении 10.
( A ) Влияние приближения уравнения 10 на работу момента силы тяжести.Пустые черные кружки изображают работу момента силы тяжести (как функцию направления движения; то есть плоский угол 𝛾), вычисленную с помощью того же приближения, что и в уравнении 10; т.е. если предположить, что момент силы тяжести постоянен по всей амплитуде движения. Цветные кружки изображают работу момента силы тяжести без какого-либо приближения (те же данные, что и на Рисунке 1B). ( B ) Влияние приближения уравнения 10 на моделируемые отношения симметрии Smooth-Effort как функцию WGT. Черные точки изображают смоделированные данные с тем же приближением, что и уравнение 10; я.е., если предположить, что момент силы тяжести постоянен по всей амплитуде движения. Красные точки изображают смоделированные данные без приближения (те же данные, что и на рисунке 1E). Каждая точка данных представляет один объект, движущийся в одном направлении (n = 255 на каждом графике).
https://doi.org/10.7554/eLife.16394.013Один комментарий от другого рецензента нашел отклик у меня. Существует альтернативная интерпретация ранних движений в параболическом полете, в которых асимметрии имитируют движения на земле.Рецензент справедливо отмечает, что реально наблюдаемые динамики сильно различаются, поэтому воспроизведение асимметрии в кинематике очень странно. По крайней мере, это свидетельство того, что фактически испытанная гравитация (или ее отсутствие) не оказывает значимого влияния на контроль, и что вся интерпретация здесь сомнительна. (По крайней мере, это очень любопытный результат).
Мы согласны с рецензентом в том, что раннее сохранение направленных асимметрий в полете является нетривиальным результатом.Однако, чтобы понять, как мозг интегрирует момент силы тяжести, нужно рассмотреть весь паттерн адаптации, то есть начальные значения в 0g вместе со следующими, а не только начальные или конечные. Существующая литература по адаптации моторики к микрогравитации или, в более общем плане, к новой динамической среде, позволяет лучше интерпретировать этот результат.
В свете предыдущих исследований микрогравитации (Crevecoeur F. McIntyre J., ThonnardJ.-L и Lefèvre P., 2010 и 2014) такое поведение (сохранение поведения 1g в начале 0g с последующей постепенной адаптацией к новым ценностям) могло можно интерпретировать как стабилизацию характеристик движения в условиях внутренней неопределенности модели.Например, в своей статье 2010 года вышеупомянутые авторы отметили, что сила захвата, необходимая для удержания объекта в руке (зажатой между большим и указательным пальцами), сохранялась аналогичной значениям 1g в начале экспозиции 0g. Затем наблюдалось, что сила захвата медленно уменьшается до новых оптимальных значений по параболам. Теоретическое моделирование показало, что эта динамика адаптации отражает стабилизацию двигательной активности, когда внутренняя модель гравитации изменяется (неопределенная).В более общем плане, эта стабилизация согласуется с первым из двойного процесса адаптации, ранее предложенного Идзавой Дж., Рэйном Т., Дончином О. и Шадмером Р., 2008: «с одной стороны, адаптация дает более точную оценку сенсорного восприятия. последствия моторных команд (то есть изучать точную прямую модель), и, с другой стороны, наш мозг ищет лучший план движения, чтобы минимизировать неявные моторные затраты и максимизировать вознаграждение (то есть найти оптимальный контроллер) ».
Рецензент № 3:
[…]
Меня по-прежнему беспокоит попытка чрезмерно обобщить эти результаты и предположить, что они опровергают то, что авторы называют «гипотезой компенсации» в более широком смысле.Это немного похоже на политический аргумент, когда кто-то принимает сторону динамической оптимизации против геометрической оптимизации. Дело в том, что в литературе приводятся свидетельства того и другого в разных контекстах. Показательный пример можно найти в недавнем исследовании Фаршансадега и его коллег (PLoS Computational Biology, 2016), которые нашли доказательства как динамической кинематической оптимизации, так и кинематики в одних и тех же механических условиях, в зависимости от согласия между визуальной и тактильной обратной связью. Тем не менее, я обычно убежден, что существенная ценность рукописи должна основываться на результатах, а не на том, как авторы хотят организовать обсуждение.Широкие рассуждения о результатах — это вопрос выбора и интеллектуальной свободы авторов. Однако следует избегать неточных утверждений, таких как предположение о том, что «гипотеза компенсации критически не получила количественной поддержки». Возможно, это утверждение может быть оправдано только тем фактом, что большинство исследователей, предполагающих наличие геометрических ограничений при формировании планирования многосуставных движений с охватом, не называют эту идею «гипотезой компенсации».
Мы понимаем замечание рецензента и благодарим его / его за уважение к нашей интеллектуальной свободе. Чтобы избежать неточных утверждений, мы изменили предложение. Теперь мы говорим: «такая гипотеза компенсации была оспорена результатами исследований, которые количественно оценили профили скорости и показали, что временная организация кинематики руки показывает небольшую, но последовательную зависимость от направления движения, скорости и нагрузки».
Мы также благодарим рецензента за то, что он указал на очень интересное и недавно опубликованное исследование Фаршиансадека и его коллег (2016).Мы считаем, что это исследование не поддерживает существование кинематической оптимизации как таковой, но показывает, что различное сенсорное восприятие окружающей среды (визуальное или проприоцептивное) может привести к оптимизации энергии, которая не всегда отделима от кинематической оптимизации. Мы сослались на это исследование, а также на другое недавно опубликованное (Shadmehr et al., 2016), посвященное важности усилий в адаптации моторного поведения.
https://doi.org/10.7554/eLife.16394.015Движение снаряда — кинематика | Сопротивление воздуха | Параболическая кривая
Физика на основе алгебры 1 уроки, вопросы для кликеров и расписание в pdf (на основе запросов) Триш Лёблейн HS
UG-IntroHW
Демо
ЛабораторияФизика Концептуальные вопросы по физике с использованием PhET (на основе запросов) Триш Лёблейн UG-Intro
HSMC Физика Введение в движение снаряда (на основе запроса) Триш Лёблейн HS
UG-IntroПульт дистанционного управления
MC
ЛабораторияФизика Квадратичные функции для движения снаряда Сара Хэмптон и Салли Джиллетт HS
MSGuided
ОбсудитьМатематика Кинематическое уравнение Ши Филлипс HS С направляющей Физика Квадратичные снаряды beki toussaint HS Лаборатория Математика Экспериментальный план: движение снаряда! Джейми Шенбергер MS Управляемая
ЛабораторияНауки о Земле
ПрочееУрок сопротивления воздуха Команда PhET средней школы UTeach MS Лаборатория Физика Исследование снаряда для средней школы Мастерская средней школы округа Джефферсон MS Лаборатория Математика
Физика
Науки о ЗемлеКаким образом симуляции PhET подходят для моей программы средней школы? Сара Боренштейн MS Другое Биология
Физика
Химия
Науки о ЗемлеЭксперимент с движением снаряда Salsabil Alsamman HS
UG-IntroУправляемая
ЛабораторияФизика Движение снаряда (HTML5) адхам халед UG-Intro
UG-Adv
HSЛаборатория Физика Движение снаряда — лабораторный эксперимент Марьям Алблооши UG-Intro Лаборатория Физика Снаряд Движение Башаер Абдалла Салим Алнакби UG-Intro Лаборатория Физика рабочий лист движения снаряда Лара Баян Ахмад UG-Intro
HS
UG-AdvHW
MC
Lab
RemoteФизика Движение снаряда Зайед Хамад Алмазруэй UG-Intro Лаборатория Физика Эксперимент по движению снаряда Абдулла Абдулла Алавадхи HS
UG-IntroУправляемый
Удаленный
ЛабораторныйФизика
ДругоеОтчет лаборатории движения снаряда Омар Алноман UG-Intro Лаборатория Физика 4p-3″> Отчет лаборатории движения снаряда Mohmmaed Nasser Moneim UG-Intro
HSHW
Remote
LabФизика движение снаряда Марьям Талал UG-Intro Лаборатория Физика Отчет лаборатории движения снаряда Ясмин Аламири UG-Adv
Grad
HS
UG-IntroLab
HW
RemoteФизика Сопротивление воздуха Боб Полтис UG-Intro Управляемый
Лабораторный
УдаленныйФизика Деятельность виртуальной лаборатории Projectile Motion Яков Залкинд HS
UG-IntroУдаленный
ЛабораторияФизика Движение снаряда Майтха Маджан UG-Intro
HSЛаборатория Физика Эксперимент по движению снаряда джавахер бин хаммад UG-Intro Лаборатория Физика Горизонтальное движение снаряда Сара Мохаммед UG-Intro Лаборатория Физика движение снаряда Ханан ханан саид Другое Лаборатория Физика движение снаряда Марьям алзааби UG-Adv HW
ЛабораторияФизика движение снаряда Фатма Аль-Али HS Лаборатория Физика Движение снаряда Эльмустафа Эльмубарак UG-Intro Лаборатория Физика Движение снаряда Саид Али UG-Intro Лаборатория Физика движение снаряда Ибрагим Альсвидан MS Лаборатория Физика Отчет лаборатории движения снаряда фади каззаз UG-Intro Лаборатория Физика Снаряд Движение Мустафа Хасан Мохаммед Эльмаллах UG-Intro Лаборатория Физика Движение снаряда, дальность, время, скорость Муза Джамал Альнуайми UG-Intro Lab
RemoteФизика Снаряд Движение Абдельмонем Атеф UG-Adv
UG-IntroLab
HW
RemoteФизика Рабочий лист движения проекта Юсеф Алаа UG-Intro Лаборатория Физика Движение снаряда (лабораторный отчет) Али Алгфели UG-Intro Лаборатория Физика Снаряд Движение Зейяд Мохаммед UG-Intro Лаборатория
Прочее
HWФизика Снаряд Движение Суха Аль-Хадха HS
UG-IntroЛаборатория Физика Снаряд Движение Амр Ахмед UG-Intro Лаборатория Физика Движение снаряда Халид Альсале Другое Лаборатория Физика снаряд Рая Альшамси UG-Intro Лаборатория Физика Рабочий лист снаряда Маджед Мансур Аль Хашими UG-Intro Лаборатория Физика движение снаряда мохамед алнакби Другое Лаборатория Физика Снаряд Движение Росс Пинкертон, Джоан Роке HS Удаленный
Управляемый
ЛабораторияФизика Лаборатория движения горизонтальных снарядов Росс Пинкертон, Джоан Роке HS Lab
Remote
GuidedФизика Движение снаряда (включая сопротивление воздуха) Фатма Фуад UG-Intro
HS
UG-AdvЛаборатория
УправляемыйФизика Снаряд Движение карим аллаххам UG-Intro Лаборатория Физика Рабочий лист движения снаряда М.Салман Исмаил UG-Intro
HSGuided
Lab
Remote
HWФизика снаряд мотыльков abood hamad UG-Intro Лаборатория Физика Снаряд Движение Амна Биншемель UG-Intro
HSЛаборатория Физика Отчет лаборатории движения снаряда Абдулла Салехи HS Лаборатория
HWФизика Снаряд Аиша Альхаммади HS
UG-IntroLab
RemoteФизика Снаряд Движение Галия Альзаруни UG-Intro
MS
HSЛаборатория
УправляемыйФизика Снаряд Движение Нура Джасим HS
UG-IntroУдаленный
ЛабораторияФизика Движение снаряда Майтха Алдармаки UG-Intro
HSУдаленный
ЛабораторияФизика Снаряд Движение Амна Фейсал UG-Intro
HSLab
RemoteФизика Движение снаряда Maitha Abdulla Almazrouei UG-Intro
HSУдаленный
ЛабораторияФизика движение снаряда Сумайя альзааби UG-Intro Лаборатория Физика Снаряд Движение Шахад Альхосани UG-Intro Удаленный
ЛабораторияФизика Снаряд Движение Амна Биншемель UG-Intro
HSЛаборатория Физика ОТЧЕТ О ДВИЖЕНИИ ПРОЕКТА Аиша Альзааби UG-Intro Лаборатория Физика движение снаряда Салах Махди UG-Adv Лаборатория Физика Движение снаряда (#lab) мохамед эрфан UG-Intro
HSHW
ЛабораторияФизика Движение снаряда и горизонтальная составляющая его скорости Дания АлАли UG-Intro
HSLab
RemoteФизика Свободное падение барабан уложен UG-Intro
HSЛаборатория Физика движение снаряда реэм алали UG-Intro Лаборатория Физика Движение снаряда Хасан Аладжми UG-Intro Лаборатория Физика Снаряд Движение meera ahli MS
HSУдаленный
ЛабораторияФизика Управляемое открытие (китайский / английский) для студентов-первокурсников по физике: 1.Кинематика Чэрити Грейс Уайт (白愛恩), Джанет Чен (陳 衫 豫), Джонатон Дэвид Уайт (白小明) UG-Intro Управляемая
ЛабораторияФизика движение снаряда Али Хумайд Алалили UG-Intro Лаборатория Физика снаряд абдулла осамельдин UG-Intro Лаборатория Физика Отчет о движении снаряда Ахмед Алсувайди HS Лаборатория
HWФизика Движение снаряда — горизонтальная и полная траектория Линн Кистлер HS Лаборатория Физика Снаряд Движение Ахд Шошаа UG-Intro
HS
UG-AdvGuided
Обсудить
LabФизика Отчет лаборатории движения Абдулбасит Варсаме UG-Intro
HSHW Физика моделирование движения снаряда Махмуд Аман UG-Intro Лаборатория Физика форма отчета лаборатории движения projectil Муджтаба Аббас UG-Intro Лаборатория Физика Взаимосвязь снарядов с горизонтальным выпуском Эми Карпинелли UG-Intro
HSУдаленный
Лаборатория
HWФизика Горизонтальное движение снаряда Усама Абдулгани UG-Intro Лаборатория Физика движение снаряда Амр Йехиа UG-Intro
UG-AdvУправляемая
Лаборатория
ДемоФизика Движение снаряда Ахмед Эз Эддин HS
UG-IntroЛаборатория
HWФизика движение снаряда Ахмед Эз Эддин UG-Intro
HSHW
ЛабораторияФизика Рабочий лист движения снаряда Асил Атир Град Lab
Remote
HW
GuidedФизика
ДругоеСнаряд Движение Салем Аль Мхейри UG-Adv Лаборатория Физика Снаряд Движение Исмаил Зейн UG-Intro Лаборатория Физика Движение снаряда (Анвар Мабрук Аль-Тальха) Анвар Мабрук Другое Лаборатория
УправляемыйФизика Снаряд Движение Мохамед Аламири UG-Intro Пульт Физика Рабочий лист движения снаряда Мустафа Аларадж HS
UG-IntroЛаборатория Физика Лаборатория моделирования снарядов PhET барбара бакли HS Lab
Remote
GuidedФизика Снаряд Движение халифа алкетби Другое Лаборатория Физика Снаряд Движение Сара Аль Карам UG-Intro Лаборатория Физика движение проекта ноура хамад хазим UG-Adv
ГрадЛаборатория Физика Движения Сопротивление воздуха zuhair M Z Abdalmenem UG-Intro
HSHW Физика Горизонтальное движение снаряда Абдалла Алалаунех UG-Intro Лаборатория Физика Снаряд движения — время полета (горизонтальный снаряд) Мохамед Ахмед Мохамед Исмаил UG-Intro Лаборатория Физика Эксперименты с движением снаряда Руслан Кувшинов UG-Intro
UG-AdvЛаборатория Физика движение снаряда yousef faisal UG-Intro Лаборатория Физика Движение снаряда Эксперимент Мохаммед Ат-Тайеб HS
UG-Adv
UG-IntroУправляемая
ЛабораторияФизика Снаряд Движение Бушр Алассуад UG-Intro
HSДемо
Обсудить
Лаборатория
УправляемыйФизика Снаряд Движение Бараа Махди UG-Intro Лаборатория Физика Движение снаряда Мохамад Фархат UG-Intro Лаборатория
УправляемыйФизика Время полета относительно начальной скорости горизонтального снаряда. Айсса Мессауди UG-Intro С направляющей Физика HS
UG-IntroLab
RemoteФизика Движение снаряда — лабораторный эксперимент по физике 1 Язен Мохаммад Рихан UG-Intro Управляемый
Удаленный
ЛабораторныйФизика Выравнивание MS и HS TEK с Sim Элиз Циммер HS
MSДругое Химия
Физика
БиологияОбнаружение движения снаряда Шон Бостон UG-Intro
HSHW
Guided
Remote
LabФизика Снаряд Движение Надя Львов HS
UG-IntroHW
Demo
Remote
Lab
GuidedФизика
Математикадвижение по прямой с постоянным ускорением Тахани Сарайрех HS
UG-IntroLab
RemoteФизика Лаборатория снарядов (запуск под углом) Арой Мукаррам UG-Intro
HSGuided
HW
Remote
LabФизика Лаборатория снарядов (горизонтальный запуск) Арой Мукаррам UG-Intro
HSLab
Guided
HW
RemoteФизика UG-Intro
HSУдаленный
Управляемый
ЛабораторияФизика Эксперименты с движением снаряда Наваль Найфе UG-Intro
HSЛаборатория Физика Плата Падение Наваль Найфе HS
UG-IntroLab
RemoteФизика Regents Physics — Введение в движение снаряда Алекс Рейда HS Лаборатория Физика Симулятор движения снаряда Дэвид Вирт HS Лаборатория Физика Отображение физики PhET и IBDP Джая Рамчандани HS Другое Физика Моделирование PhET адаптировано для AP Physics C Роберта Таннер HS Другое Физика Тир параболический Хорди Плана MS HW Физика Снаряд Параболы Эми Рид HS С направляющей Математика Запуск тыкв — решение квадратичных функций Крейг Сивер HS
MSLab
Guided
ОбсудитьМатематика Сравнение скорости и угла с расстоянием до снаряда Джефф Спрингер MS С направляющей Физика 3 фактора движения снаряда Мэри Терен HS Управляемая
ЛабораторияФизика Изучение векторов и движения снаряда Брайан Минчен HS С направляющей Физика Запрос на управляемый снаряд Лаура Мэттик HS С направляющей Физика Запрос активности снаряда Джефф Драч MS
HSС направляющей Физика Введение в виртуальную лабораторию Tiro Parabólico Диана Лопес и Оскар Суарес HS
UG-IntroLab
MC
Remote
Обсудить
GuidedФизика Explorando el movimiento parabólico Лаура Арболеда, Диана Лопес и Хосе Рамирес HS Лаборатория
УправляемыйНауки о Земле
ФизикаSECUNDARIA: Alineación PhET con programas de la SEP México (2011 г 2017 г.) Диана Лопес HS
MSДругое Физика
Биология
Химия
МатематикаIntroducción a la Física: medidas, unidades y relación entre variables Диана Лопес UG-Intro
HSGuided
HW
Remote
LabФизика ПОДГОТОВКА: Alineación de PhET con programas de la DGB México (2017) Диана Лопес UG-Intro
HSДругое Математика
Физика
ХимияПРИМАРИЯ: Alineación con programas de la SEP México (2011 г 2017 г.) Диана Лопес К-5
МСУправляемый
Лаборатория
HW
Обсудить
ДемоАстрономия
Химия
Физика
МатематикаComposició de moviment.Движение параболическое. PhET Ана Мария Лафуэнте Герас HS Удаленный
Лаборатория
HW
MCФизика Der Gerade Wurf Изабелла Радл MS
HSHW
С направляющейФизика Лаборатория движения снаряда хаким алхамиди MS
HSЛаборатория Физика Снаряд Движение Др.Нафисех Наср HS
UG-IntroЛаборатория
HWФизика Lançamento de projéteis Марсио Бур Рибейро Град
UG-IntroLab
RemoteФизика Lançamento Vertical no PhET Кэролайн Сантос душ Сантуш; Мириан Марчезан Лопес; Памела да Силвейра Фрейтас. MS
HSRemote
HW
Guided
LabФизика Corona vírus vs lançamento de projéteis Клейсон Лима HS
Град
MSЛаборатория Физика Atividade de Lançamento Oblíquo Джеирла Монтейро, Гилванденис Л.Продажа HS Другое Физика Atividades sobre o movimento dos corpos Artur Araújo Cavalcante e Gilvandenys Leite Продажи Другое
MS
HSОбсудить
Другое
HW
GuidedМатематика
Другое
Физика
Науки о ЗемлеMecânica (Atividades) nos OA’s do PhET Artur Araújo Cavalcante e Gilvandenys Leite Продажи UG-Intro
MS
HS
Другое
GradGuided
HW
Обсудить
Other
Lab
DemoНауки о Земле
Другое
ФизикаCinemática (Atividades) nos OA’s do PhET Artur Araújo Cavalcante e Gilvandenys Leite Продажи Другое
HS
UG-Intro
MSDemo
Lab
Other
Guided
HWФизика
Другое
Науки о ЗемлеVelocidade e Aceleração no Lançamento de Projéteis no «Projectile Motion (HTML5)» Artur Araújo Cavalcante e Gilvandenys Leite Продажи Другое
MS
HSHW
Направляемые
ДругоеФизика
Другое
Науки о ЗемлеQueda Livre no «Projectile Motion (HTML5)» Artur Araújo Cavalcante e Gilvandenys Leite Продажи HS
MS
ДругоеНаправляемые
HW
ПрочееНауки о Земле
Математика
Физика
ДругоеLançamento Vertical de Projéteis no «Projectile Motion (HTML5)» Artur Araújo Cavalcante e Gilvandenys Leite Продажи HS
MS
ДругоеHW
Другое
С направляющейНауки о Земле
Физика
Математика
ДругоеLançamento Horizontal de Projéteis no «Projectile Motion (HTML5)» Artur Araújo Cavalcante e Gilvandenys Leite Продажи Другое
HS
MSHW
Направляемые
ДругоеМатематика
Науки о Земле
Физика
ДругоеLançamento de Projéteis Хосе Карлос Феррейра Бастос, Darkson Фернандес да Коста HS
UG-IntroЛаборатория
Демонстрация
УправляемаяФизика Lançando Projéteis no «Projectile Motion (HTML5)» Artur Araújo Cavalcante e Gilvandenys Leite Продажи HS
MSНаправляемые
HW
ПрочееФизика
Науки о Земле
МатематикаLançamento Oblíquo Inicial Карлос Альбукерке MS HW
ДемоФизика ПРАКТИКИ МОДЕЛИРОВАНИЯ ФЭННИ МОРИ UG-Adv Пульт Физика ESTUDIO Y OBSERVACIÓN DEL MOVIMIENTO DE UN PROYECTIL Лауреано Костарроса HS Remote
Обсудить
HW
Guided
LabФизика Actividad — movimiento parabólico Хаги Юкра и Джессика Лоренцо HS HW Физика HOJA DE TRABAJO Лаура Муньос HS Управляемый
УдаленныйФизика Movimiento Parabolico Вальтер Мануэль Трухильо Яипен UG-Intro
HS
Grad
Другое
UG-Adv
MSLab
Guided
Other
MC
HWМатематика
Другое
ФизикаГиа де трабахо; Movimiento de un Proyectil Мария Камила Льоренте Кастро — Хулио Сезар Паес Гарсия К-5 С направляющей Физика Movimiento Parabolico.Сравнение данных Вальтер Мануэль Трухильо Яипен K-5
UG-Intro
Grad
MS
HS
Другое
UG-AdvLab
HW
Remote
DemoДругое
Математика
ФизикаMovimiento en dos sizes: Caso del Proyectil (Двухмерный механизм, футляр для снаряда). Кармен Мальдонадо HS
UG-IntroHW
Lab
Remote
GuidedФизика Practica de Movimiento Parabolico Вальтер Мануэль Трухильо Яипен UG-Intro
Grad
UG-Adv
MS
HSLab
HW
Guided
OtherФизика Practica Tiro Parabolico (перевод) Херардо Сармьенто MS
HSЛаборатория
УправляемыйФизика КЛАСС GRADO 10 FISICA николас ривера HS Лаборатория Физика Практика: Тиро Параболико МОНИКА КРАВЕРО MS
HSДемо
Управляемая
ЛабораторияФизика Динамика и управление космическим аппаратом | Coursera
Целью этого проекта динамики космического корабля является использование навыков, полученных на курсах кинематики твердого тела, кинетики и управления.Рассматривается захватывающая миссия на Марс с двумя космическими кораблями, в которой основной базовый корабль находится на связи с дочерним кораблем на другой орбите. Задачи включают определение кинематики орбитальной системы координат и нескольких желаемых опорных кадров, численное моделирование динамики ориентации космического корабля на орбите и реализацию управления с обратной связью, которая затем переводит различные корпуса космического корабля в различные режимы полета, включая наведение на солнце для получения энергии. поколение, указание надира для сбора научных данных, указание основного космического корабля для связи и передачи данных.Наконец, разработано интегрированное моделирование миссии, которое реализует эти режимы ориентации и исследует получаемые в результате автономные характеристики с обратной связью.
Силы, действующие на хоккеистов: векторы, работа, энергия и угловой момент
В наших усилиях по поиску сложных, но интересных и реалистичных примеров для представления студентам-физикам мы сосредоточиваем здесь внимание на хорошо известном и популярном виде спорта — хоккее с шайбой. — и, в частности, как катаются футболисты.Примеры из реальной жизни часто вовлекают учащихся в дискуссии, затрудняющие их понимание, как это было исследовано в более ранних работах, например на качелях [1], вышках [2], батутах [3, 4] и американских горках [4, 5]. В этой статье мы представляем физику катания двумя разными способами и призываем читателей использовать ее в качестве примера в своем обучении.
Физика катания на коньках может включать угловой момент фигуристов, измерение чисел трения, исследования таяния поверхностного слоя льда или подробные исследования движения фигуристов (см. E.г. [6, 7]).
В этой статье мы сосредотачиваемся на горизонтальных силах в движении хоккеистов во время поступательного движения, включая рассмотрение работы и энергии. Двое из нас (NN и HN) много лет работали тренерами по хоккею и обнаружили, что альтернативная техника, кажется, предлагает сопоставимую скорость, но требует меньше энергии от фигуристов, чем традиционные хоккейные шаги. В этой статье исследуется физика, лежащая в основе этого опыта, сравниваются традиционные хоккейные шаги и альтернативная техника, показанная на рисунке 1, где дуги окружности используются для изменения направления.
Приблизить Уменьшить Сбросить размер изображения
Рис. 1. Последовательность (справа налево) снимков экрана (6 в секунду) фигуриста, использующего нетрадиционную технику слалома, обсуждаемую в этой статье.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияПоскольку трение в направлении движения лезвия конькового хода очень низкое ( μ ≈ 0,006), фигуристы могут ускоряться только за счет приложения усилий, перпендикулярных лезвию для катания на коньках (или толкая коньком конька).Типичная стартовая последовательность проиллюстрирована на рисунке 2. Затем катание на коньках переходит к шагам вперед, как показано на рисунке 3, а результирующие следы на льду показаны на рисунке 4. Марино [8] обнаружил, что тратится 80% шага конькового хода. в фазе одиночной опоры, или фазы планирования, и 20% в фазе двойной опоры, или фазы движения ».
Приблизить Уменьшить Сбросить размер изображения
Рисунок 2. Последовательность пуска с дополнительным переходом.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияПриблизить Уменьшить Сбросить размер изображения
Рисунок 3. Пример традиционного шага вперед, когда правый конек отталкивается перпендикулярно лезвию, или кончик конька с последующим отталкиванием левого конька. Тело также немного вращается, и движение руки из стороны в сторону уменьшает поперечное движение ядра тела.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияПриблизить Уменьшить Сбросить размер изображения
Рис. 4. Следы на льду для обычных быстрых шагов под углом θ к основному направлению движения вместе с определением системы координат, используемой для анализа. Горизонтальная сила F , воздействующая на лед на фигуриста, перпендикулярна лопасти конька.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияВ недавних работах по хоккейному катанию использовались несколько датчиков и камер для определения трехмерных кинематических профилей старта катания, а также шагов при максимальной скорости катания (например, [9–12]). Обработку изображений, используемую в этих исследованиях, можно рассматривать как тщательно продуманное расширение анализа видео с открытым исходным кодом (например, Physlets.org/tracker/), которое можно использовать в образовании, например для определения движения центра масс молота [13] или балерины в большом жете [14].
Для хоккея на коньках характерны быстрые старт, разбег, остановки и повороты. Горизонтальные силы на тело, необходимые для этих движений, должны создаваться льдом. Горизонтальная сила льда отвечает за ускорение центра масс конькобежца вперед, назад и вбок, но не может работать. Энергию обеспечивают мышцы фигуристов, которые не являются «твердыми телами». Например. разгибание ноги может ускорить центр масс и обеспечить кинетическую энергию [15, 16].Однако, поскольку горизонтальные силы на коньке по существу ортогональны движению самого конька (если конек не скользит, как при быстром торможении), изменение движения центра масс может происходить в направлении движения другого конька. , или к центру дуги окружности. Таким образом можно получить увеличение кинетической энергии. Катание на дистанции также требует многократной смены направления движения. Эти изменения можно получить разными способами, как описано ниже.
Рассмотрим сначала традиционное хоккейное катание, как описано, например, Штамма [17]. Ускорение в направлении движения, увеличивающее кинетическую энергию тела, обеспечивается работой, выполняемой вытянутой ногой, как показано на рисунке 3.
Этот тип движения был подробно проанализирован на примере элитных хоккеистов, ( см., например, [9–12]), где несколько датчиков, а также маркеры на теле и видеоанализ использовались для изучения трехмерного движения фигуристов на льду, сравнивая различные кинематические профили для начальных шагов «фазы ускорения». ‘, а также для дальнейших успехов.Бударик с соавторами [11, 12] обнаружили, что во время «фазы ускорения, когда спортсмены отталкиваются от относительно фиксированного места на льду, скорость вращения вносит больший вклад в скорость движения вперед». Более поздние шаги характеризовались «скользящим отталкиванием, при котором положение передней части конька перемещается по льду, а скорость разгибания ноги играет большую роль в создании скорости поступательного движения».
Из следов на рисунке 3 мы видим, что некоторое ускорение, полученное при разгибании ноги, необходимо для изменения направления движения.Это требует энергии от фигуриста, как обсуждается ниже.
3.1. Работа и энергия при традиционных шагах вперед
В первом упрощенном анализе преобразований энергии при шагах вперед мы рассматриваем движение по прямолинейным траекториям под углом θ от среднего направления движения вдоль оси y , как показано на рисунке 4. Скорость в начале каждого шага обозначается как v i .
Тогда скорость в начале шага вправо после отталкивания левой ногой может быть записана как.Перед тем, как нога оттолкнется для следующего шага, скорость упала до, где доля α <1 зависит от сопротивления воздуха и трения между льдом и скользящим коньком. В конце шага скорость можно записать как. Затем кинетическая энергия упала с до, где м — масса фигуриста.
Кинетическая энергия, теряемая во время шага, должна подаваться во время отталкивания, чтобы следующий шаг начался со скоростью, немного влево.Однако, исходя из системы фигуриста, двигающегося по дорожке вправо, мы могли бы рассматривать работу, проделанную разгибающей правой ногой для достижения новой скорости. (Обратите внимание, что изменения кинетической энергии зависят от начальной скорости в используемой системе отсчета [15, 16].) Это изменение скорости может быть записано как
Фигуристу необходимо выполнить работу Вт , соответствующую кинетической энергии. относительной скорости, давая
Используя, это можно переписать как
Вставка выражения для потери кинетической энергии в системе катка дает
Таким образом, работа, необходимая для нового шага, оказывается больше, чем кинетическая энергия, потерянная во время предыдущего шага, если.В нереалистичном случае отсутствия трения, α = 1, нет необходимости в чередовании шагов, и движение может продолжаться в том же направлении с θ = 0. Если вместо этого вся кинетическая энергия была потеряна до начала следующего шага, т.е. α = 0, фигурист уже находится в состоянии покоя в системе катка и, следовательно. Для θ = 45 °, где новый шаг ортогонален предыдущему, а последний член исчезает. Требуемая работа равна сумме работы, необходимой для остановки движения в начальном направлении (если смотреть со стороны катка), и работы, необходимой для достижения полной скорости в новом ортогональном направлении.
Эта модель явно упрощена: смещение направления движения центра масс меньше, чем в модели, приведенной выше. Когда нога вытягивается вправо, она толкает тело влево, и тело больше не находится прямо над дорожкой. Боковое движение рук, раскачивающееся из стороны в сторону, как на рисунке 3, также уменьшает боковое движение ядра тела.
Hayward-Ellis и др. [18] проанализировали «силы реакции опоры» с использованием различных методов поворота руки и обнаружили, что силы боковой реакции, вызванные этим поворотом руки, сопоставимы с боковой силой от коньков.Они также пришли к выводу, что махи руками из стороны в сторону были более эффективными для катания на коньках, чем махи руками из стороны в сторону, используемые бегунами, а также многими фигуристами.
Также можно отметить, что дорожка на рис. 3 отклоняется от прямой линии — во время последней части шага конек слегка поворачивается наружу, чтобы толчок лучше совмещался со скольжением на другой ноге, поскольку Горизонтальная часть силы, воздействующей на лед, по существу перпендикулярна лопасти конька.
В следующем разделе мы обсудим катание на коньках с угловым моментом, где изменение направления вместо этого обеспечивается движением по дуге окружности, а полная энергия, обеспечиваемая работой, приложенной перпендикулярно дорожке, преобразуется в кинетическую энергию.
В этом разделе мы обсуждаем катание по угловому моменту, когда изменение направления вместо этого обеспечивается движением по дуге окружности. В этой альтернативной технике смена направления не требует от фигуриста дополнительной энергии.Вместо этого боковая сила льда на наклонном коньке используется для создания дуги, направление которой изменяется непрерывно, без необходимости работы со стороны фигуриста. (Потери энергии из-за трения в направлении движения происходят, конечно, независимо от используемой техники.)
В традиционном хоккейном катании после того, как один конек, S1, покидает лед, а другой конек, S2, скользит по льду. , конек S1 перемещается ближе к коньку S2 в положение, подходящее для начала следующей фазы скольжения, под углом, чтобы кататься на коньках S1.Затем конек S2 отталкивается, а нога разгибается до того, как конек S2 отрывается ото льда, в то время как S1 продолжает скользить, как показано в примере на рисунке 3.
При движении по угловому моменту, после того, как конек S1 покидает лед, вместо того, чтобы подготовиться к следующее скольжение при приближении к скользящему коньку S2, конек S1 помещается на лед, по существу, на параллелях , чтобы кататься на коньках S2, и оба конька затем скользят вместе по дуге окружности (рисунок 5). Лед обеспечивает центростремительную силу, которая может распределяться на оба конька.
Приблизить Уменьшить Сбросить размер изображения
Рисунок 5. Разметка ледовых дорожек из демонстрации техники катания по угловому моменту.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияТело также наклоняется к центру круга, позволяя общей силе льда на каждую ногу быть вдоль направления ноги. Скейт S2 подталкивает тело к коньку S1, смещая центр масс ближе к центру круга по мере того, как нога расширяется.Поскольку сила, действующая от льда, абсолютно ортогональна коньку, она указывает на центр круга, и угловой момент сохраняется. Приближение к центру подразумевает увеличение скорости, как более подробно обсуждается в разделе 4.2.
В таблице 1 показаны различные фазы последовательности перемещений, связанные с аннотированной последовательностью снимков экрана на рисунках 6 и 7 и с аннотированной дорожкой на рисунке 8.
Приблизить Уменьшить Сбросить размер изображения
Рисунок 6. Выбор снимков экрана с рисунка 1, показывающих различные части шага, как описано в разделе 4. На рисунке движение выполняется справа налево.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияПриблизить Уменьшить Сбросить размер изображения
Рис. 7. Снимки экрана (с интервалом 0,1 с) движения, если смотреть сзади. Наклон конька указывает направление силы ото льда.Буквы соответствуют описанию в разделе 4 различных частей шага.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияПриблизить Уменьшить Сбросить размер изображения
Рисунок 8. Следы на льду с буквами, обозначающими примерное расположение двух коньков во время различных частей слаломного шага, определенного в разделе 4.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияТаблица 1. Фазы последовательности ходов, связанных с аннотированной последовательностью снимков экрана на рисунках 6 и 7, а также с аннотированной дорожкой на рисунке 8.
(a) Конек S1 покидает лед. (b) Конек S1 движется близко к скользящему коньку S2. (c) Коньки S1 размещаются на льду, по существу, параллельно , чтобы кататься на коньках S2. (d) Оба конька затем скользят вместе по дуге окружности, в то время как коньки и корпус наклоняются по кругу. (e) Skate S2 толкает корпус к центру дуги окружности. (f) Окончательное разгибание ноги, перенос нагрузки на коньки S1 до того, как конек S2 покинет лед. (Движение руки способствует смещению центра масс.) 4.1. Катание по дугам окружности
Верхняя последовательность на рисунке 1 показывает, как левая нога толкает тело к центру дуги вправо на внутреннем крае.Левая нога отталкивается и разгибается, в то время как правый конек движется по прямой линии вперед и в сторону от левой ступни. Снежная часть трассы показывает, где боковой толчок был наиболее сильным. Во время этой части движения можно работать левой ногой, чтобы увеличить скорость фигуриста, смещая центр масс к центру круга, как более подробно обсуждается в разделе 4.2. Затем втягивается левая нога, и все тело поворачивается влево, а правая ступня переключается на катание по внутреннему краю.Для изменения направления не требуется дополнительной энергии. Когда левый конек снова соприкасается со льдом на внешнем крае, это помогает толкать тело влево.
Эта вторая строка последовательности на рисунке 1 показывает, что левый конек снова контактирует со льдом, сначала на внешнем крае, возможно, обеспечивая поддержку правому коньку, когда тело толкается влево, смещая центр масс. После того, как правый конек покидает лед, тело поворачивается к внутреннему краю левого конька, который затем толкает тело к центру дуги окружности, которая смещается вправо.
В третьем ряду на рис. 1 показан правый конек, контактирующий со льдом, а левый, подталкивающий его ближе к центру дуги. Также обратите внимание, что в той части, когда движение меняет направление, руки держатся ближе к телу, уменьшая момент инерции тела.
На рис. 6 показан аннотированный выбор снимков экрана с рис. 1, иллюстрирующих различные части движения. На рис. 7 показаны аннотированные снимки экрана с интервалом 0,1 с, показывающие движение сзади.Наклон конька указывает направление силы ото льда. Изображения также показывают относительно долгое время контакта обоих коньков со льдом, поскольку центр масс смещен справа налево, а правый конек отталкивается.
На рис. 8 показаны цветные следы аналогичного движения в другой части льда. Буквы относятся к последовательности фотографий на рисунке 7 и в таблице 1, что дает попытку совпадения треков на льду и положения двух коньков во время различных частей движения.
4.2. Угловой момент при катании вперед
Фигурист, двигаясь по внутреннему краю по дуге окружности, может толкать центр масс тела к центру круга. Конькобежец со скоростью v , совершая круговое движение с радиусом r , ускоряется с v 2 / r (центростремительное ускорение) к центру круга. Затем лед должен с силой давить на коньки. Если фигурист сохраняет радиус, изменение направления будет достигнуто без дополнительной энергии.
Поскольку внешняя сила, действующая на фигуриста, перпендикулярна конькобежной дорожке и направлена к центру круга, угловой момент L сохраняется. В этом случае мы можем написать L = mrv , где r — радиус окружности, а v — скорость центра масс. Если фигурист с начальной скоростью v 0 вошел в дугу окружности с радиусом R , а затем уменьшил радиус центра масс до r , скорость увеличится до.Смещения центра масс можно добиться, раздвинув ноги и / или больше наклонившись к центру. Сила льда может быть приложена к одному или обоим конькам. На рисунке 9 показан пример движения центра масс с постоянным угловым моментом, но уменьшающимся радиусом.
Приблизить Уменьшить Сбросить размер изображения
Рис. 9. Схематическое изображение увеличения скорости, полученное при смещении центра масс ближе к центру круга для постоянного углового момента.Внешняя дуга окружности представляет собой начальный радиус, а отметки вдоль этого круга представляют собой временные метки для движения без изменения радиуса. Обратите внимание на то, что расстояние между метками на спирали увеличивается по мере уменьшения радиуса. Для сравнения справа показан схематический вид обычных линейных шагов (с рис. 4). Ось и на диаграмме справа отмечает основное направление движения, которое также применимо к диаграмме слева.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияРабота конькобежца может быть рассчитана путем вставки зависимости центростремительной силы от радиуса: в выражение для работы, что дает
Оценка интеграла дает
Это выражение идентично изменению кинетической энергии, связанной с увеличением скорость для меньших радиусов.Таким образом, вся работа, выполняемая телом по перемещению центра масс ближе к центру круга, преобразуется в кинетическую энергию.
Для анализа в этом разделе не имеет значения, исходит ли сила для смещения центра масс от одного конька или другого, или их комбинации, когда масса смещается от одного конька к другому, при подготовке к следующему. шаг. Наклон к центру дуги, а также перемещение рук из одной стороны в другую также способствуют смещению центра масс относительно беговой дорожки.Можно отметить, что этот тип движения нельзя практиковать на беговой дорожке для катания на коньках: в то время как линейное движение является относительным и эквивалентным отдыху, с движущимся окружением, это не выполняется для вращений и круговых движений.
Угловой момент чаще ассоциируется с фигурным катанием, когда тело фигуриста образует центр круга, а руки втягиваются, чтобы уменьшить момент инерции, что приводит к более высоким угловым скоростям. В этой работе мы показали, как угловой момент может иметь значение и для конькового хода вперед.
Распространенной проблемой в хоккее с шайбой является «крутой поворот», когда игроки стремятся изменить направление движения как можно быстрее. Это включает в себя большое ускорение и, следовательно, большую силу в направлении, противоположном первоначальному движению. Традиционно игроки замедляются, останавливаются, а затем начинают снова, используя переход, чтобы набрать скорость в новом направлении, как изучалось, например. в [19] на 90 ◦ витков. Когда астронавты Аполлона-13 воскликнули: «Хьюстон, у нас проблема», они обнаружили, что им нужно продолжить полет на Луну, чтобы обратить движение вспять — доступного ракетного топлива было бы недостаточно для поворота в «свободном пространстве», в то время как движение вокруг Луны создавалась центростремительная сила, способная обратить движение вспять, не используя для этой операции никакого топлива.Опять же, использование узкой дуги окружности может предложить быстрый и энергоэффективный хоккейный поворот, описанный [20] как «открытый поворот могавка». Плавное переключение с прямого на обратное катание позволяет игроку по-прежнему следить за шайбой. Этот ход демонстрируется в сопровождающем видео-аннотации.
В этой статье рассматривается, как фундаментальные физические концепции классической механики могут быть применены к пониманию ускоренного катания вперед и сравнения традиционного хоккейного катания с нетрадиционной техникой, основанной на сохранении углового момента.
Один из авторов (Н.Н.) несколько раз испытал преимущество нетрадиционной техники, основанной на угловом моменте, во время разминки хоккейной тренировки: когда участников просили кататься вперед и назад по льду, она обнаружила, что один за другим , элитные игроки, использующие традиционное катание вперед, отдыхали в углу, в то время как она продолжала кататься, сравнительно без усилий. Теоретический анализ с использованием классических физических представлений о работе, энергии и угловом моменте подтверждает ее опыт, согласно которому альтернативная техника подразумевает меньшие потери энергии и требует меньше усилий со стороны фигуриста.Более подробный анализ с использованием нескольких датчиков и видеоанализа может быть полезен студенческим проектам для студентов, играющих в хоккей.
Авторы хотели бы поблагодарить профессора Сесилию Ярлског за то, что они собрали нас вместе.
Объяснение кинематической вязкости | Смазка машин
Что такое кинематическая вязкость?
Кинематическая вязкость — это мера внутреннего сопротивления жидкости потоку под действием гравитационных сил.Он определяется путем измерения времени в секундах, необходимого для того, чтобы фиксированный объем жидкости прошел известное расстояние под действием силы тяжести через капилляр в калиброванном вискозиметре при строго контролируемой температуре.
Это значение преобразуется в стандартные единицы, такие как сантистоксы (сСт) или квадратные миллиметры в секунду. Отчет о вязкости действителен только в том случае, если также указывается температура, при которой проводился тест — например, 23 сСт при 40 ° C.
Из всех тестов, используемых для анализа отработанного масла, ни один не обеспечивает лучшей повторяемости или стабильности теста, чем вязкость.Точно так же нет свойства более критичного для эффективной смазки компонентов, чем вязкость базового масла. Однако вязкость — это нечто большее, чем кажется на первый взгляд. Вязкость может быть измерена и представлена как динамическая (абсолютная) вязкость или как кинематическая вязкость. Их легко спутать, но они существенно отличаются.
Большинство лабораторий по анализу используемых масел измеряют и сообщают кинематическую вязкость. Напротив, большинство локальных вискозиметров измеряют динамическую вязкость, но запрограммированы на оценку и отображение кинематической вязкости, так что сообщаемые измерения вязкости отражают кинематические числа, сообщаемые большинством лабораторий и поставщиков смазочного масла.
Учитывая важность анализа вязкости в сочетании с растущей популярностью инструментов для анализа нефти на месте, используемых для проверки и дополнения анализа нефти в лаборатории за пределами площадки, важно, чтобы аналитики нефти понимали разницу между динамическими и кинематическими измерениями вязкости.
Вообще говоря, вязкость — это сопротивление жидкости течению (напряжение сдвига) при заданной температуре. Иногда вязкость ошибочно называют толщиной (или массой).Вязкость не является измерением размеров, поэтому называть высоковязкое масло густым, а менее вязкое — разреженным — вводить в заблуждение.
Точно так же бессмысленно сообщать о вязкости для определения тенденций без ссылки на температуру. Для интерпретации показаний вязкости необходимо определить температуру. Обычно вязкость указывается при 40 ° C и / или 100 ° C или при обоих значениях, если требуется индекс вязкости.
Уравнение кинематической вязкости
Несколько технических единиц используются для выражения вязкости, но наиболее распространенными являются сантисток (сСт) для кинематической вязкости и сантипуаз (сП) для динамической (абсолютной) вязкости.Кинематическая вязкость в сСт при 40 ° C является основой для системы классификации кинематической вязкости ISO 3448, что делает ее международным стандартом. Другие распространенные системы кинематической вязкости, такие как Saybolt Universal Seconds (SUS) и система классификации SAE, могут быть связаны с измерением вязкости в сСт при 40 ° C или 100 ° C.
Измерение кинематической вязкости
Кинематическая вязкость измеряется путем учета времени, за которое масло проходит через отверстие капилляра под действием силы тяжести (рис. 1).Отверстие трубки кинематического вискозиметра создает постоянное сопротивление потоку. Доступны капилляры разного размера для поддержки жидкостей различной вязкости.
Время, необходимое для прохождения жидкости через капиллярную трубку, можно преобразовать в кинематическую вязкость, используя простую калибровочную константу, предусмотренную для каждой трубки. Основной процедурой для выполнения измерений кинематической вязкости является ASTM D445, часто изменяемый в лаборатории анализа отработанного масла для экономии времени и повышения эффективности измерения.
Рис. 1. Капиллярный вискозиметр с U-образной трубкой
Измерение динамической вязкости (абсолютной вязкости)
Динамическая вязкость измеряется как сопротивление потоку, когда внешняя и контролируемая сила (насос, сжатый воздух и т. Д.) Заставляет масло проходить через капилляр (ASTM D4624) или тело проталкивается через жидкость под действием внешней контролируемой силы, такой как шпиндель с приводом от двигателя.В любом случае измеряется сопротивление потоку (или сдвигу) как функция входящей силы, которая отражает внутреннее сопротивление образца приложенной силе или его динамическую вязкость.
Существует несколько типов и исполнений абсолютных вискозиметров. Роторный метод Брукфилда, изображенный на рисунке 2, является наиболее распространенным. Измерение абсолютной вязкости использовалось для исследовательских целей, контроля качества и анализа пластичных смазок в области смазки оборудования.
Рис. 2. Ротационный вискозиметр ASTM D2983
Процедуры тестирования динамической вязкости в лаборатории традиционным методом Брукфилда определены ASTM D2983, D6080 и другими. Тем не менее, динамическая вязкость становится обычным явлением в области анализа отработанного масла, поскольку большинство продаваемых сегодня на рынке вискозиметров измеряют динамическую, а не кинематическую вязкость.Поставщиками локальных динамических вискозиметров являются Anton Paar, Kittiwake и Spectro Scientific.
Вообще говоря, кинематическая вязкость (сСт) относится к абсолютной вязкости (сП) как функции удельного веса (SG) жидкости в соответствии с уравнениями на рисунке 3.
Рис. 3. Уравнения вязкости
Какими бы простыми и элегантными ни казались эти уравнения, они верны только для так называемых ньютоновских жидкостей.Кроме того, удельный вес жидкости должен оставаться постоянным в течение периода тренда. Ни одно из этих условий не может считаться постоянным при анализе отработанного масла, поэтому аналитик должен знать условия, при которых могут возникать отклонения.
Кинематическая вязкость: ньютоновские и неньютоновские жидкости
Ньютоновская жидкость — это жидкость, которая поддерживает постоянную вязкость при всех скоростях сдвига (напряжение сдвига изменяется линейно со скоростью сдвига). Эти жидкости называются ньютоновскими, потому что они следуют исходной формуле, установленной сэром Исааком Ньютоном в его Законе механики жидкостей.Однако некоторые жидкости так себя не ведут. В общем, их называют неньютоновскими жидкостями. Ньютоновские жидкости включают газы, воду, масло, бензин и спирт.
Группа неньютоновских жидкостей, называемых тиксотропными, представляет особый интерес при анализе отработанных масел, поскольку вязкость тиксотропных жидкостей уменьшается с увеличением скорости сдвига. Вязкость тиксотропной жидкости увеличивается с уменьшением скорости сдвига. В случае тиксотропных жидкостей время схватывания может увеличить кажущуюся вязкость, как и в случае пластичной смазки.Примеры неньютоновских жидкостей включают:
- Загустители при сдвиге: вязкость увеличивается с увеличением скорости сдвига. Например, кукурузный крахмал, помещенный в воду и перемешанный, со временем становится гуще.
- Жидкости для разжижения при сдвиге: вязкость уменьшается с увеличением скорости сдвига. Краска для стен — хороший тому пример. По мере перемешивания краска становится более жидкой.
- Тиксотропные жидкости: становятся менее вязкими при перемешивании.Типичные примеры этого — томатный кетчуп и йогурт. После встряхивания они становятся более жидкими. Оставленные в покое, они возвращаются в гелеобразное состояние.
- Реопектические жидкости: становятся более вязкими при взбалтывании. Типичный пример этого — чернила для принтера.
Кинематическая вязкость: ньютоновские и неньютоновские жидкости Ньютоновские жидкости Неньютоновские жидкости Газы Жидкости, загущающие при сдвиге (более высокая скорость сдвига, более высокая вязкость) Вода Жидкости, разжижающие сдвиг (более высокая скорость сдвига, более низкая вязкость) Масло Тиксотропные жидкости (становятся менее вязкими при перемешивании) Бензин Реопектические жидкости (становятся более вязкими при взбалтывании) Алкоголь Кинематическая вязкость: практический пример
Представьте, что перед вами две банки: одна наполнена майонезом, другая — медом.Когда обе банки прикреплены к поверхности стола с помощью липучки, представьте, что вы погружаете одинаковые ножи для масла в каждую из жидкостей под одинаковым углом и на одинаковую глубину. Представьте, что вы перемешиваете две жидкости, вращая ножи с одинаковой частотой вращения, сохраняя при этом одинаковый угол атаки.
Какую из двух жидкостей было сложнее перемешать? Вашим ответом должен быть мед, который намного сложнее размешать, чем майонез. Теперь представьте, что вы снимаете банки с застежки-липучки на столе и переворачиваете банки на бок.Что быстрее вытекает из банки, мед или майонез? Ваш ответ должен быть мед; майонез совсем не потечет, если перевернуть банку на бок.
Какая жидкость более вязкая, мед или майонез? Если вы сказали майонез, вы правы … по крайней мере, частично. Точно так же, если вы сказали мед, вы частично правы. Причина очевидной аномалии заключается в том, что при вращении ножа в обоих веществах скорость сдвига меняется, а при повороте каждой банки на бок просто измеряется статическое сопротивление потоку.
Поскольку мед — это ньютоновская жидкость, а майонез — неньютоновский, вязкость майонеза падает при увеличении скорости сдвига или при вращении ножа. При перемешивании майонез подвергается сильному сдвиговому напряжению, что приводит к его податливости. И наоборот, просто поставив банку на бок, майонез подвергнется низкому сдвиговому напряжению, в результате чего вязкость практически не изменится, поэтому он, как правило, остается в банке.
Невозможно условно измерить вязкость неньютоновской жидкости.Скорее, необходимо измерить кажущуюся вязкость, которая принимает во внимание скорость сдвига, при которой проводилось измерение вязкости. (См. Рисунок 4). Подобно тому, как измерения вязкости не имеют смысла, если не указана температура испытания, измерения кажущейся вязкости не имеют смысла, если не указаны температура испытания и скорость сдвига.
Например, вязкость консистентной смазки никогда не указывается, скорее, кажущаяся вязкость консистентной смазки указывается в сантипуазах (сП).(Примечание: вязкость может указываться для базового масла, используемого для изготовления смазки, но не для готового продукта.)
Вообще говоря, жидкость является неньютоновской, если она состоит из одного вещества, взвешенного (но не растворенного химически) в жидкости хозяина. Для этого есть две основные категории: эмульсии и коллоидные суспензии. Эмульсия — это стабильное физическое сосуществование двух несмешивающихся жидкостей. Майонез — это обычная неньютоновская жидкость, состоящая из яиц, эмульгированных в масле, жидкости хозяина.Поскольку майонез не является ньютоновским, его вязкость уменьшается с приложенной силой, что облегчает его намазывание.
Коллоидная суспензия состоит из твердых частиц, стабильно взвешенных в жидкости хозяина. Многие краски представляют собой коллоидную суспензию. Если бы краска была ньютоновской, она либо легко растекалась бы, но растекалась при низкой вязкости, либо растекалась бы с большим трудом и оставляла следы кисти, но не растекалась бы при высокой вязкости.
Поскольку краска неньютоновская, ее вязкость уменьшается под действием силы кисти, но возвращается, когда кисть убирается.В результате краска растекается относительно легко, но не оставляет следов кисти и не растекается.
Динамическая вязкость и кинематическая: в чем разница
Динамическая вязкость определяет толщину пленки масла. Кинематическая вязкость — это просто удобная попытка оценить степень толщины пленки, которую может обеспечить масло, но имеет меньшее значение, если масло неньютоновское.
Многие смазочные составы и условия дают неньютоновскую жидкость, в том числе:
Присадки, улучшающие индекс вязкости (VI) — Всесезонные моторные масла на минеральной основе (кроме естественных базовых масел с высоким индексом вязкости) содержат упругую присадку, которая уплотняется при низких температурах и расширяется при высоких температурах в ответ на повышение растворимости жидкости.Поскольку эта добавочная молекула отличается от молекул масла-хозяина, она ведет себя неньютоновским образом.
Загрязнение воды — Нефть и свободная вода не смешиваются, во всяком случае химически. Но при определенных обстоятельствах они будут объединяться в эмульсию, как и майонез, о котором говорилось ранее. Это подтвердит любой, кто видел масло, похожее на кофе со сливками. Хотя это может показаться нелогичным, загрязнение воды при эмульгировании в масло на самом деле увеличивает кинематическую вязкость.
Побочные продукты термического и окислительного разложения — Многие побочные продукты термического и окислительного разложения нерастворимы, но переносятся маслом в стабильной суспензии. Эти приостановки создают неньютоновское поведение.
Сажа — Сажа, обычно встречающаяся в дизельных двигателях, представляет собой частицу, которая образует коллоидную суспензию в масле. Диспергирующая добавка к маслу, предназначенная для предотвращения агломерации и роста частиц сажи, способствует образованию коллоидной суспензии.
Если бы нужно было измерить абсолютную вязкость одной из этих часто встречающихся эмульсий или коллоидов, описанных выше, с помощью абсолютного вискозиметра с переменной скоростью сдвига (например, ASTM D4741), измерение уменьшилось бы по мере увеличения скорости сдвига до точки стабилизации. .
Если бы эту стабилизированную абсолютную вязкость разделить на удельный вес жидкости для оценки кинематической вязкости, расчетное значение будет отличаться от измеренной кинематической вязкости.Опять же, уравнения на рисунке 3 применимы только к ньютоновским жидкостям, а не к неньютоновским жидкостям, описанным выше, поэтому возникает это несоответствие.
Влияние кинематической вязкости и удельного веса
Посмотрите еще раз на уравнения на рисунке 3. Абсолютная и кинематическая вязкости ньютоновской жидкости связаны как функция удельного веса жидкости. Рассмотрим устройство на Рисунке 1: колба, содержащая пробу масла, которая высвобождается при устранении вакуума, а затем создает напор, который прогоняет масло через капиллярную трубку.
Можно ли предположить, что все жидкости будут создавать одинаковый напор? Нет, давление зависит от удельного веса жидкости или веса относительно веса идентичного объема воды. Большинство смазочных масел на углеводородной основе имеют удельный вес от 0,85 до 0,90. Однако это может измениться со временем, поскольку масло ухудшается или становится загрязненным (например, гликоль, вода и металлы износа), что приводит к разнице между измерениями абсолютной и кинематической вязкости.
Рассмотрим данные, представленные в таблице 2. Каждый из новых сценариев использования нефти идентичен, и в обоих случаях абсолютная вязкость увеличивается на 10 процентов, что обычно является критическим пределом для изменения вязкости. В сценарии А небольшое изменение удельного веса приводит к небольшой разнице между измеренной абсолютной вязкостью и кинематической вязкостью.
Этот дифференциал может немного задержать звучание сигнала о замене масла, но не вызовет большой ошибки.Однако в сценарии B разница намного больше. Здесь удельный вес значительно увеличивается, что приводит к измеренному увеличению кинематической вязкости на 1,5 процента по сравнению с увеличением на 10 процентов, измеренным с помощью абсолютного вискозиметра.
Это существенное различие, которое может привести к тому, что аналитик определит ситуацию как не подлежащую отчетности. Сделанная ошибка заключается в предположении в обоих сценариях, что флюиды остаются ньютоновскими.
Из-за множества возможностей образования неньютоновских жидкостей, истинным параметром, представляющим интерес для аналитика нефти и специалиста по смазочным материалам, должна быть абсолютная вязкость.Это то, что определяет толщину пленки жидкости и степень защиты поверхностей компонентов. В интересах экономии, простоты и того факта, что новые процедуры испытаний смазочных материалов обычно используются для анализа отработанного масла, кинематическая вязкость масла является измеряемым параметром, используемым для определения тенденций и принятия решений по управлению смазочными материалами. Однако в некоторых случаях это может приводить к ненужным ошибкам при определении вязкости масла.
Проблема сводится к простой математике.Как показывают уравнения на Рисунке 3, абсолютная и кинематическая вязкость связаны как функция удельного веса масла. Если и вязкость, и удельный вес являются динамическими, но измеряется только одна, произойдет ошибка, и кинематическая вязкость не даст точной оценки изменения абсолютной вязкости жидкости, представляющего интерес параметра. Величина погрешности зависит от величины изменения неизмеряемого параметра, удельного веса.
Важные выводы относительно кинематической вязкости
Из этой дискуссии об измерении вязкости можно сделать следующие выводы:
Предполагая, что лаборатория измеряет вязкость кинематическими методами, добавление измерения удельного веса к стандартной программе лабораторного анализа масла поможет исключить его как переменную при оценке абсолютной вязкости по измеренной кинематической вязкости.
При использовании вискозиметра на объекте не ищите полного согласия между кинематическим вискозиметром лаборатории и приборами на месте. Большинство этих устройств измеряют абсолютную вязкость (сП) и применяют алгоритм для оценки кинематической вязкости (сСт), часто сохраняя постоянный удельный вес. Рассмотрите возможность анализа тенденций результатов местного вискозиметра в сП.
Это измеряемый параметр, который помогает отличить тенденцию на месте от тенденции данных, полученных в лаборатории с помощью кинематического вискозиметра.Не пытайтесь достичь идеального согласия между измерениями вязкости на месте и в лаборатории. Это бесполезно и мало ценно. В лучшем случае ищите слабую корреляцию. Всегда устанавливайте базовый уровень нового масла с тем же вискозиметром, который вы используете с рабочим маслом.
Помните, что неньютоновские жидкости не обеспечивают такой же пленочной защиты для данной кинематической вязкости, как ньютоновские жидкости той же кинематической вязкости. Поскольку вязкость неньютоновской жидкости зависит от скорости сдвига, прочность пленки снижается под действием рабочей нагрузки и скорости.Это одна из причин, по которым эмульгированная вода увеличивает скорость износа таких компонентов, как подшипники качения, где прочность пленки жидкости имеет решающее значение (конечно, вода также вызывает другие механизмы износа, такие как паровая кавитация, ржавчина и водородное охрупчивание и образование пузырей).
Вязкость — критическое свойство жидкости, и мониторинг вязкости необходим для анализа масла. Методы измерения динамической и кинематической вязкости могут давать очень разные результаты при испытании отработанных масел.Убедитесь, что все тонкости измерения вязкости и поведения вязкой жидкости понятны, чтобы можно было принимать точные решения о смазке.
.Leave a Reply