Контрольная работа по кинематике | Методическая разработка по физике:
Контрольная работа носит тематический характер. Каждый вариант содержит задачи разных уровней сложности. Учащийся может ознакомиться со всеми заданиями и самостоятельно выбрать уровень сложности, приемлемый для него в данный момент.
Каждый вариант включает 6 заданий.
1,2,3 задачи — первый уровень сложности. Эти задания рассчитаны на усвоение основных понятий, на простое отображение материала или несложные расчеты при узнавании и воспроизведении.
4.5 задачи- второй уровень сложности. Эти задания на 2-4 логических шага. Решение этих заданий требует более глубоких знаний по курсу физики и позволяет их применять в стандартных ситуациях.
6 задача- третий уровень сложности –задания, решения которых требует творческого использования приобретенных знаний и позволяет применять их в нестандартных ситуациях.
Правильность выполнения каждого задания оценивается в баллах:
1,2,3 задачи: по 1-2 балла
4-5 задачи: по 3 балла
6 задача: по 4 балла
Для оценивания результатов контрольной работы следует использовать следующие критерии:
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
1 вариант | 2 вариант |
Автомобиль движется со скоростью 72км/ч. | Троллейбус трогается с места с ускорением 1,2 м/с2 . Какую скорость приобретает троллейбус за 1 минуту? (1 балл) |
Точка вращается по окружности радиусом 0,2м с периодом 2с. Определить линейную скорость.(2 балла) | Чему равен период колеса ветродвигателя, если за 2 минуты колесо сделало 50 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Самолет при посадке коснулся посадочной полосы аэродрома при скорости 252 км/ч.Через 30 секунд он остановился. Определить путь , пройденный самолетом при посадке. | Тело брошено вертикально вниз со скоростью 5м/с с высоты 20м. Определить время падения тела на землю и скорость тела в момент падения. |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
 Определить ускорение автомобиля, если через 20минут он остановится. (1балл)
Определить ускорение автомобиля, если через 20минут он остановится. (1балл) и аналит.)(3 балла)
и аналит.)(3 балла)Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
3 вариант | 4 вариант |
Автомобиль при разгоне за 10 секунд приобретает скорость 54 км/ч. | Вагонетка движется из состояния покоя с ускорением 0,25 м/с2. Какую скорость будет иметь вагонетка через 2 минуты от начала движения? (1 балл) |
Определить период вращающегося диска, если он за 10секунд делает 40 оборотов. (2 балла) | Какова скорость трамвайного вагона,движущегося по закруглению радиусом 50 метров с центростремительным ускорением 0,5м/с2.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Тело свободно падает с высоты 24 метра(без начальной скорости). Определить время падения тела и скорость тела в момент падения на землю.(3 балла) | Автомобиль , двигаясь со скоростью 43,2 км/ч, останавливается при торможении в течение 3 секунд. Какое расстояние он пройдет до остановки?(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
 Определить ускорение автомобиля. (1балл)
Определить ускорение автомобиля. (1балл) и аналит.)(3 балла)
и аналит.)(3 балла)Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
5 вариант | 6 вариант |
Поезд тронулся с места и через 10секунд разогнался до 54 км/ч. | Автомобиль ,трогаясь с места, движется с ускорением 0,25 м/с2. Какую скорость будет иметь автомобиль через 4 минуты от начала движения? (1 балл) |
Определить период вращающегося колеса, если он за 2минуты делает 60 оборотов. (2 балла) | Какова скорость автомобиля ,движущегося по закруглению радиусом 60 метров с центростремительным ускорением 1м/с2.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Автомобиль , двигаясь в течение некоторого отрезка времени с ускорением 0,6 м/с2, совершил перемещение 400м. Какова конечная скорость автомобиля ,если его начальная скорость 20,5 м/с?(3 балла) | Камень свободно падает с высоты 56 метров(без начальной скорости). Определить время падения камня и скорость в момент падения на землю(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
 Определить ускорение поезда. (1балл)
Определить ускорение поезда. (1балл) и аналит.)(3 балла)
и аналит.)(3 балла)Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
7 вариант | 8 вариант |
Поезд ,трогаясь с места, движется с ускорением 1м/с2. | Автомобиль тронулся с места и через 30 секунд разогнался до 60 км/ч. Определить ускорение автомобиля. (1балл) |
Точка обращается по окружности радиуса 1,5 метра с центростремительным ускорением 25 м/с2 Определить скорость точки. (2 балла) | Каково центростремительное ускорение тела при его равномерном движении по окружности радиусом 10 см, если при этом тело совершает 30 оборотов в минуту.(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Автомобиль , двигаясь в течение некоторого отрезка времени со скоростью 90 м/с, снижает свою скорость до 72 км/ч на пути длиной 56,25 4м. Каково ускорение автомобиля при торможении и время торможения?(3 балла) | Тело, двигавшееся со скоростью 108км/ч,тормозит с ускорением 2м/с2 на пути длиной 200метров. Определить конечную скорость тела и время торможения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) (4 балла) |
 Какую скорость будет иметь поездчерез 5 минут от начала движения? (1 балл)
Какую скорость будет иметь поездчерез 5 минут от начала движения? (1 балл) и аналит.)(3 балла)
и аналит.)(3 балла)Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
9 вариант | 10 вариант |
Автомобиль движется со скоростью 108 км/ч. | Троллейбус трогается с места с ускорением 2 м/с2 . Какую скорость приобретает троллейбус за 7 минут? (1 балл) |
Точка вращается по окружности радиусом 2м с периодом 10 с. Определить линейную скорость.(2 балла) | Чему равен период колеса ветродвигателя, если за 3 минуты колесо сделало 10 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Вертолет при посадке коснулся посадочной полосы аэродрома при скорости 126 км/ч.Через 15 секунд он остановился. Определить путь , пройденный вертолетом при посадке.(3 балла) | Тело брошено вертикально вниз со скоростью 15м/с с высоты 30м. Определить время падения тела на землю и скорость тела в момент падения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
 Определить ускорение автомобиля, если через 3 минуты он остановится. (1балл)
Определить ускорение автомобиля, если через 3 минуты он остановится. (1балл) и аналит.)(3 балла)
и аналит.)(3 балла)Контрольная работа по теме: «Кинематика»
оценки | 5 | 4 | 3 | 2 |
баллы | 11-15 | 8-10 | 5-7 | 0-4 |
11 вариант | 12 вариант |
Автобус трогается с места с ускорением 0,4м/с2 . | Поезд движется со скоростью 60 км/ч.Определить ускорение поезда, если через 0,5 минут он остановится. (1балл) |
Точка вращается по окружности радиусом 5м с частотой 2 Гц. Определить линейную скорость.(2 балла) | Чему равна частота колеса ветродвигателя, если за 3 минуты колесо сделало 10 оборотов?(2 балла) |
По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) | По графику зав-ти скорости движения тела от времени определить характер движения тела, начальную скорость и ускорение на каждом участке (2 балла) |
Найти место и время встречи двух тел 2 способами (графич. и аналит. | Найти место и время встречи двух тел 2 способами (графич. и аналит.)(3 балла) |
Вертолет при посадке коснулся посадочной полосы аэродрома при скорости 126 км/ч.Через 15 секунд он остановился. Определить путь , пройденный вертолетом при посадке.(3 балла) | Тело брошено вертикально вниз со скоростью 15м/с с высоты 30м. Определить время падения тела на землю и скорость тела в момент падения.(3 балла) |
По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) | По графику зав-ти скорости движения тела от времени построить графики зависимости ах(t), Sx(t) |
 Какую скорость приобретает автобус за 3 минуты? (1 балл)
Какую скорость приобретает автобус за 3 минуты? (1 балл) )(3 балла)
)(3 балла)Контрольная работа по теме: «Кинематика». 9 класс. | Методическая разработка по физике (9 класс) на тему:
ВАРИАНТ 1.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 3 с.
НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 3 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 4 м, Y0 = 2 м В ТОЧКУ С КООРДИНАТАМИ X = 1 м, Y = 5 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 40 — 20t, x2 = 10 + 10t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. ТЕЛО ЗА 6 с ПРИОБРЕЛО СКОРОСТЬ 30 м/с. ОПРЕДЕЛИТЕ УСКОРЕНИЕ ТЕЛА.
ВАРИАНТ 2.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ V ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 2 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 2 м, Y0 = — 2 м В ТОЧКУ С КООРДИНАТАМИ X = 4 м, Y = 2 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 20 — 5t, x2 = 10 + 5t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
км/ч
4. УСКОРЕНИЕ ТЕЛА РАВНО 0,55м/с2. НА СКОЛЬКО УВЕЛИЧИТСЯ СКОРОСТЬ ТЕЛА ЗА 8 с?
ВАРИАНТ 3.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ V ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 4 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 5 м, Y0 = 1 м В ТОЧКУ С КООРДИНАТАМИ X = 1 м, Y = — 2 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 4 — t, x2 = 2 + t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.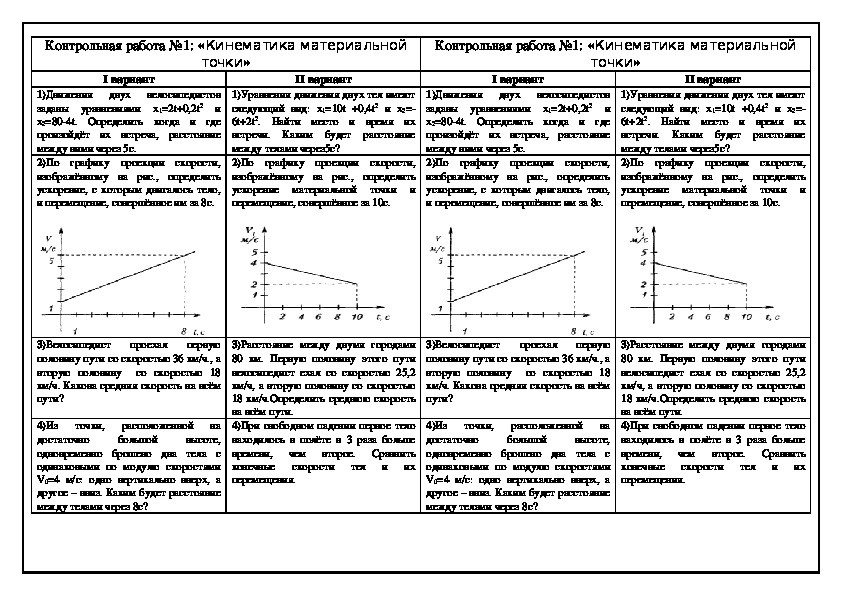
4. СКОРОСТЬ ТЕЛА ЗА 25 с УВЕЛИЧИЛАСЬ ОТ 36 км/ч ДО 72 км/ч. ОПРЕДЕЛИТЕ УСКОРЕНИЕ ТЕЛА.
ВАРИАНТ 4.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 2 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 4 м, Y0 = 2 м В ТОЧКУ С КООРДИНАТАМИ X = 7 м, Y = — 1 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 10+ 4t2, x2 = 13 — 5t.
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. ЗА КАКОЕ ВРЕМЯ РАКЕТА РАЗГОНИТСЯ ДО СКОРОСТИ 1,8 км/с, ЕСЛИ ЕЁ УСКОРЕНИЕ РАВНО 600 м/с2?
ВАРИАНТ 5.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t.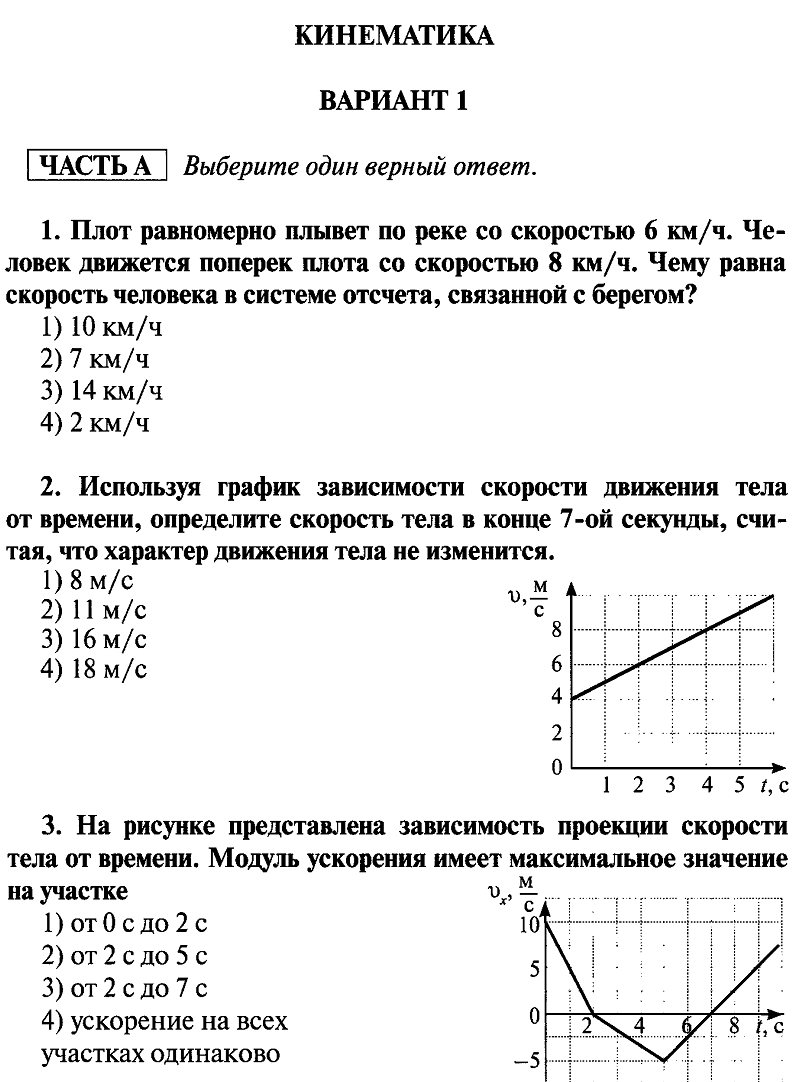 НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 1 с.
НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 1 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 5 м, Y0 = 5 м В ТОЧКУ С КООРДИНАТАМИ X = 1 м, Y = 2 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 11 — 15t, x2 = 2 + 12t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. ШАРИК ЗА 3 с ПРИОБРЕЛ СКОРОСТЬ 18 м/с. ОПРЕДЕЛИТЕ УСКОРЕНИЕ ТЕЛА.
ВАРИАНТ 6.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 4 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = — 4 м, Y0 = 2 м В ТОЧКУ С КООРДИНАТАМИ X = — 1 м, Y = 5 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 40 — 20t, x2 = 10 + 10t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. УСКОРЕНИЕ ТЕЛА РАВНО 2,5 м/с2. НА СКОЛЬКО УВЕЛИЧИТСЯ СКОРОСТЬ ТЕЛА ЗА 3 с?
ВАРИАНТ 7.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 2 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = — 4 м, Y0 = 3 м В ТОЧКУ С КООРДИНАТАМИ X = — 1 м, Y = -1 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 2+ 4t2, x2 = 5 — 5t.
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.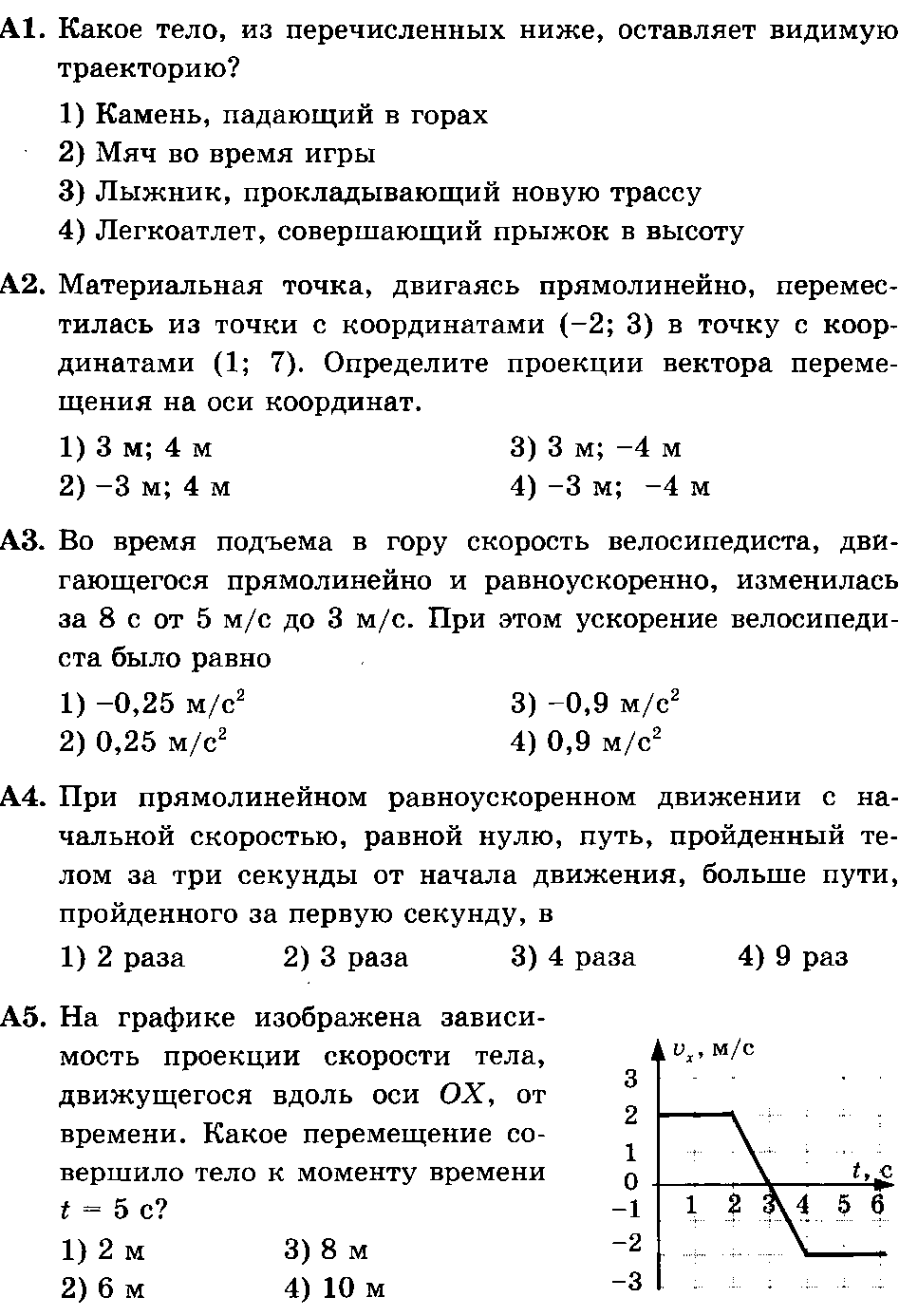
ВАРИАНТ 8.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 3 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 4 м, Y0 = 6 м В ТОЧКУ С КООРДИНАТАМИ X = 0 м, Y = 3 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 16 — 15t, x2 = 7 + 12t2..
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. СКОРОСТЬ СЛАЛОМИСТА НА СПУСКЕ УВЕЛИЧИВАЕТСЯ ОТ 5 ДО 25 м/с ЗА 2 с. НАЙДИТЕ УСКОРЕНИЕ СЛАЛОМИСТА
ВАРИАНТ 9.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 6 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = — 4 м, Y0 = 3 м В ТОЧКУ С КООРДИНАТАМИ X = — 1 м, Y = 8 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 50 — 20t, x2 = 20 + 10t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. УСКОРЕНИЕ ТЕЛА РАВНО 6 м/с2. НА СКОЛЬКО УВЕЛИЧИТСЯ СКОРОСТЬ ТЕЛА ЗА 5 с?
ВАРИАНТ 10.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 2 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 8 м, Y0 = 6 м В ТОЧКУ С КООРДИНАТАМИ X = 4 м, Y = 3 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.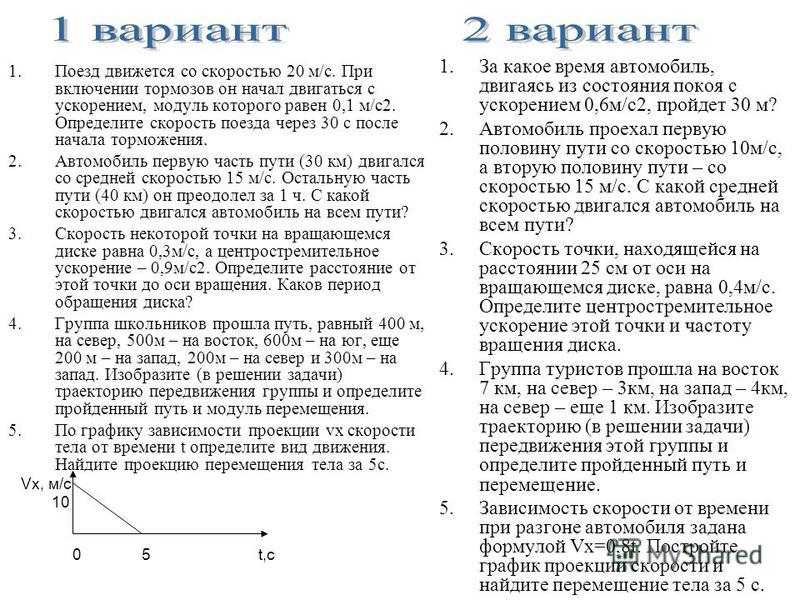
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 7+ 4t2, x2 = 10 — 5t.
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. ЗА 10 с СКОРОСТЬ ПОЕЗДА УВЕЛИЧИЛАСЬ НА 16 м/с. ОПРЕДЕЛИТЕ УСКОРЕНИЕ ПОЕЗДА.
ВАРИАНТ 11.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 4 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 2 м, Y0 = 2 м В ТОЧКУ С КООРДИНАТАМИ X = 5 м, Y = 6 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 20 — 20t, x2 = — 10 + 10t2
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. УСКОРЕНИЕ САМОЛЁТА РАВНО 10 м/с2. НА СКОЛЬКО УВЕЛИЧИТСЯ СКОРОСТЬ САМОЛЁТА ЗА 5 с?
ВАРИАНТ 12.
1. НА РИСУНКЕ ПРЕДСТАВЛЕН ГРАФИК ЗАВИСИМОСТИ ПРОЕКЦИИ СКОРОСТИ Vx ПРЯМОЛИНЕЙНО ДВИЖУЩЕГОСЯ ТЕЛА ОТ ВРЕМЕНИ t. НАЙДИТЕ ПРОЕКЦИЮ ПЕРЕМЕЩЕНИЯ ТЕЛА ЗА 2 с.
2. ТЕЛО ПЕРЕМЕСТИЛОСЬ ИЗ ТОЧКИ С КООРДИНАТАМИ X0 = 4 м, Y0 = 6 м В ТОЧКУ С КООРДИНАТАМИ X = 1 м, Y = 2 м. ПОСТРОЙТЕ ВЕКТОР ПЕРЕМЕЩЕНИЯ И НАЙДИТЕ ЕГО ПРОЕКЦИИ НА ОСИ КООРДИНАТ И МОДУЛЬ.
3. ДВА ТЕЛА ДВИЖУТСЯ ПО ОДНОЙ ПРЯМОЙ, ТАК, ЧТО ИХ УРАВНЕНИЯ ИМЕЮТ ВИД: x1 = 15+ 4t2, x2 = 18 — 5t.
а) ОПРЕДЕЛИТЕ ВИД ДВИЖЕНИЯ;
б) ПОКАЖИТЕ НА ОСИ ОХ НАЧАЛЬНЫЕ КООРДИНАТЫ ТЕЛ, НАПРАВЛЕНИЯ ИХ СКОРОСТЕЙ И УСКОРЕНИЙ;
в) КАКОВЫ БУДУТ КООРДИНАТЫ ТЕЛ ЧЕРЕЗ 5 с?
г) ОПРЕДЕЛИТЕ ВРЕМЯ И МЕСТО ВСТРЕЧИ;
д) ПОСТРОЙТЕ ГРАФИКИ СКОРОСТИ.
4. СКОРОСТЬ ПАРАШЮТИСТА ПРИ ВЫБРАСЫВАНИИ ПАРШЮТА УМЕНЬШАЕТСЯ НА 40 м/с ЗА 4 с.
НАЙДИТЕ УСКОРЕНИЕ, С КОТОРЫМ «ТОРМОЗИТ» ПАРАШЮТИСТ.
Физика 10 класс КР-1 В2 Контрольная с ответами
Контрольная работа по физике в 10 классе «КИНЕМАТИКА» (вариант 2) с ответами на все варианты для любого учебника, входящего в Федеральный перечень (автор: О. И. Громцева). Дидактические материалы по физике для учителей, учеников и их родителей. Физика 10 класс КР-1 В2.
И. Громцева). Дидактические материалы по физике для учителей, учеников и их родителей. Физика 10 класс КР-1 В2.
Физика 10 класс. КИНЕМАТИКА
Контрольная работа № 1. Вариант 2
А1. Исследуется перемещение лошади и бабочки. Модель материальной точки может использоваться для описания движения
1) только лошади; 2) только бабочки; 3) и лошади, и бабочки; 4) ни лошади, ни бабочки
А2. В трубопроводе с площадью поперечного сечения 100 см1 2 нефть движется со скоростью 1 м/с. Какой объем нефти проходит по трубопроводу в течение 10 мин?
1) 0,1 м3; 2) 0,6 м3; 3) 6 м3; 4) 60 м3.
А3. Автомобиль движется по шоссе с постоянной скоростью и начинает разгоняться. Проекция ускорения на ось, направленную по вектору начальной скорости автомобиля
1) отрицательна; 2) положительна; 3) равна нулю; 4) может быть любой по знаку
А4. Каретка спускается по наклонной плоскости, длиной 15 см в течение 0,26 с. Определите ускорение каретки, если движение начинается из состояния покоя.
Определите ускорение каретки, если движение начинается из состояния покоя.
1) 1,7 м/с2; 2) 2,2 м/с2; 3) 4,4 м/с2; 4) 6,2 м/с2.
А5. На рисунке представлен график зависимости пути s велосипедиста от времени t. В каком интервале времени велосипедист не двигался?
1) От 0 с до 1 с; 2) От 1 с до 3 с; 3) От 3 с до 5 см; 4) От 5 с и далее.
В1. На пути 60 м скорость тела уменьшилась в три раза за 20 с. Определите скорость тела в конце пути, считая ускорение постоянным.
В2. На поверхность диска с центром в точке О нанесли две точки А и В (причем OB = ВА), и привели диск во вращение с постоянной линейной скоростью (см. рис.). Как изменятся перечисленные в первом столбце физические величины при переходе от точки А к точке В?
С1. Аэростат поднимается с Земли с ускорением 2 м/с2 вертикально вверх без начальной скорости. Через 20 с после начала движения из него выпал предмет. Определите, на какой наибольшей высоте относительно Земли побывал предмет.
Определите, на какой наибольшей высоте относительно Земли побывал предмет.
ОТВЕТЫ:
А1. Ответ: 3.
А2. Ответ: 3.
А3. Ответ: 2.
А4. Ответ: 3.
А5. Ответ: 2.
В1. Ответ: 1,5 м/с.
В2. Ответ: 332.
С1. Ответ: 480 м.
Другие варианты: К-1. Вариант 1 К-1. Вариант 3 К-1. Вариант 4 К-1. Вариант 5
Вернуться с Списку контрольных работ по физике в 10 классе (Громцева)
Вы смотрели: Физика 10 класс КР-1 В2. Контрольная работа по физике по теме «КИНЕМАТИКА» с ответами для любого учебника, входящего в Федеральный перечень. Дидактические материалы по физике для учителей, учеников и их родителей. Цитаты из пособия «Тематические контрольные и самостоятельные работы по физике. 10 класс» (авт. О.И. Громцева, изд-во «Экзамен») использованы на сайте в учебных целях.
Тема №9011 Контрольная работа по физике №1 «Кинематика» 2 варианта
Тема №9011
Мы просвятим вас с новой изучаемой темой Контрольная работа по физике №1 «Кинематика» 2 варианта с порядковым номером 9011, которая поможет при выполнении домашних заданий по предмету Физика. Если после изучения данного материала у вас появились вопросы, то вы можете задать их в форме ниже, другие единомышленники, возможно, помогут вам.
Если после изучения данного материала у вас появились вопросы, то вы можете задать их в форме ниже, другие единомышленники, возможно, помогут вам.
Контрольная работа №1 «Кинематика»
Вариант I
1. Зависимость координаты от времени имеет вид: x=4 – 3t. Определите 1) какой это вид движения; 2) постройте графики зависимости проекции скорости и ускорения от времени.
2. Уравнение данного движения имеет следующий вид: x= 5 + 4t – t2. Запишите зависимость проекции скорости от времени и постройте график этой зависимости. Какой это вид движения? Почему?
3. Торможение автомобиля до полной остановки заняло время 4 с и происходило с постоянным ускорением 4 м/с2. Найдите тормозной путь и начальную скорость автомобиля.
4. Камень брошен вертикально вверх со скоростью 50 м/с. Через сколько секунд его скорость будет равна 30 м/с и направлена вертикально вниз? На какой высоте от поверхности земли окажется в этот момент камень? g=10 м/с2.
5. Когда пассажиру осталось дойти до двери вагона 15 м, поезд тронулся с места и стал разгоняться с ускорением 0.5 м/с2. Пассажир побежал со скоростью 4 м/с. Через какое время он достигнет двери вагона?
6. Линейная скорость точек обода вращающегося колеса равна 50 см/с, а линейная скорость его точек, находящихся на 3 см ближе к оси вращения, равна 40 см/с. Определите радиус колеса.
7. Минутная стрелка часов в 1.2 раза длиннее секундной. Во сколько раз скорость конца секундной стрелки больше, чем конца минутной стрелки?
8. Во сколько раз увеличится центростремитель
Контрольная работа №1 «Кинематика»
Вариант II
1. Зависимость координаты от времени имеет вид: x=-5 +2.5t. Определите 1) какой это вид движения; 2) постройте графики зависимости проекции скорости и ускорения от времени.
2. Уравнение данного движения имеет следующий вид: x= 15 -3t + 2t2. Запишите зависимость проекции скорости от времени и постройте график этой зависимости. Какой это вид движения? Почему?
3. Пуля пробивает доску толщиной 20 см. Скорость пули до попадания в доску 200 м/с, а после вылета 100 м/с. Чему равна величина ускорения (в км/ч) пули при ее движении внутри доски?
4. С какой скоростью надо бросить тело вертикально вверх с поверхности земли, чтобы время от момента броска до момента падения тела на землю равнялось 3 с? На какую максимальную высоту поднимется тело? Какой будет скорость тела и на какой высоте оно окажется через 2 с после броска?
5. Мимо остановки по прямой улице проезжает грузовик со скоростью 10 м/с. Через 5 с от остановки вдогонку грузовику отъезжает мотоциклист, движущийся с ускорением 3 м/с2. На каком расстоянии от остановки мотоциклист догонит грузовик?
6. Точка движется с постоянной по модулю скоростью v по окружности радиуса R, Как изменится центростремитель
7.
8. Во сколько раз увеличится центростремитель
ГДЗ по физике 9 класс дидактические материалы Марон, Марон Решебник
Решение есть!- 1 класс
- Математика
- Английский язык
- Русский язык
- Литература
- Окружающий мир
- 2 класс
- Математика
- Английский язык
Контрольная работа №1 по теме «Кинематика» Вариант 1 1. 2. Поезд движется оп закруглению радиусом 500 м со скоростью 36 км/ч. Чему равно его центростремительное ускорение ? 3. Лыжник начинает спускаться с горы и за 20 с проходит путь 50 м .Определите ускорение лыжника и его скорость в конце спуска. 4. При аварийном торможении автомобиль остановился через 2 с. Найдите тормозной путь автомобиля, если он начал торможение при скорости 54 км/ч. 5. Тело, двигаясь из состояния покоя с ускорением 6м/с2 , достигло скорости 36 м/с, а затем остановилось через 5 с. Определите путь пройденный телом за все время движения ? | Контрольная работа №1 по теме «Кинематика» Вариант 2 1. Поезд, идущий со скоростью 18 км/ч, останавливается при торможении в течение 10 с. Найти его ускорение ? 2. Найти центростремительное ускорение автобуса, движущегося по выпуклому мосту с радиусом кривизны 30 м со скоростью 54 км /ч. 3. Первые 40 м пути 25 м автомобиль прошел за 10 с С каким ускорением он двигался и какую скорость при этом развил? 4. Какова длина пробега при посадке самолета, если его посадочная скорость равна 144 км/ч, а время торможения равно 20 с ? 5. Мотоциклист начал движение из состояния покоя и в течение 5 с двигался с ускорением 2 м/с2, затем 5 мин он двигался равномерно и,начав торможение, остановилось через 10 с. Определите весь пройденный им путь? | Контрольная работа №1 по теме «Кинематика» Вариант 1 1.Какую скорость приобретает троллейбус за 10 с, если он трогается с места с ускорением 1,2 м/с2? 2. Поезд движется оп закруглению радиусом 500 м со скоростью 36 км/ч. Чему равно его центростремительное ускорение ? 3. Лыжник начинает спускаться с горы и за 20 с проходит путь 50 м .Определите ускорение лыжника и его скорость в конце спуска. 4. При аварийном торможении автомобиль остановился через 2 с. Найдите тормозной путь автомобиля, если он начал торможение при скорости 54 км/ч. 5. Тело, двигаясь из состояния покоя с ускорением 6м/с2 , достигло скорости 36 м/с, а затем остановилось через 5 с. Определите путь пройденный телом за все время движения ? | Контрольная работа №1 по теме «Кинематика» Вариант 2 1. Поезд, идущий со скоростью 18 км/ч, останавливается при торможении в течение 10 с. Найти его ускорение ? 2. Найти центростремительное ускорение автобуса, движущегося по выпуклому мосту с радиусом кривизны 30 м со скоростью 54 км /ч. 3. Первые 40 м пути 25 м автомобиль прошел за 10 с С каким ускорением он двигался и какую скорость при этом развил? 4. Какова длина пробега при посадке самолета, если его посадочная скорость равна 144 км/ч, а время торможения равно 20 с ? 5. Мотоциклист начал движение из состояния покоя и в течение 5 с двигался с ускорением 2 м/с2, затем 5 мин он двигался равномерно и,начав торможение, остановилось через 10 с. Определите весь пройденный им путь? | Контрольная работа №1 по теме «Кинематика» Вариант 1 1. 2. Поезд движется оп закруглению радиусом 500 м со скоростью 36 км/ч. Чему равно его центростремительное ускорение ? 3. Лыжник начинает спускаться с горы и за 20 с проходит путь 50 м .Определите ускорение лыжника и его скорость в конце спуска. 4. При аварийном торможении автомобиль остановился через 2 с. Найдите тормозной путь автомобиля, если он начал торможение при скорости 54 км/ч. 5. Тело, двигаясь из состояния покоя с ускорением 6м/с2 , достигло скорости 36 м/с, а затем остановилось через 5 с. Определите путь пройденный телом за все время движения ? | Контрольная работа №1 по теме «Кинематика» Вариант 2 1. Поезд, идущий со скоростью 18 км/ч, останавливается при торможении в течение 10 с. Найти его ускорение ? 2. Найти центростремительное ускорение автобуса, движущегося по выпуклому мосту с радиусом кривизны 30 м со скоростью 54 км /ч. 3. Первые 40 м пути 25 м автомобиль прошел за 10 с С каким ускорением он двигался и какую скорость при этом развил? 4. Какова длина пробега при посадке самолета, если его посадочная скорость равна 144 км/ч, а время торможения равно 20 с ? 5. Мотоциклист начал движение из состояния покоя и в течение 5 с двигался с ускорением 2 м/с2, затем 5 мин он двигался равномерно и,начав торможение, остановилось через 10 с. Определите весь пройденный им путь? |
 Какую скорость приобретает троллейбус за 10 с, если он трогается с места с ускорением 1,2 м/с2?
Какую скорость приобретает троллейбус за 10 с, если он трогается с места с ускорением 1,2 м/с2?
 Какую скорость приобретает троллейбус за 10 с, если он трогается с места с ускорением 1,2 м/с2?
Какую скорость приобретает троллейбус за 10 с, если он трогается с места с ускорением 1,2 м/с2?
Начало работы с двухмерной обратной кинематикой 2D イ ン バ ー ス キ ネ マ テ ィ ク ス ー テ ィ ン グ ガ イ ド
Если вы читали мою предыдущую запись в блоге о новом пакете 2D-анимации в Unity, вам может быть любопытно, что новый пакет Inverse Kinematics может добавить в ваши проекты. Читайте дальше, чтобы узнать об основных идеях IK и о том, как настроить его в Unity.
Получение пакета
Как упоминалось ранее, 2D IK поставляется как отдельный пакет редактора и доступен из диспетчера пакетов, как и 2D-анимация.
Основы обратной кинематики
Чтобы понять обратную кинематику, нам сначала нужно знать, что они противоположны прямой кинематике, которая относится к типичному процессу ручного перемещения и поворота каждой кости для достижения желаемой точки в мировом пространстве. Идея обратной кинематики состоит в том, чтобы взять цепочку преобразований костей и использовать алгоритм для перемещения каждого преобразования так, чтобы последняя кость находилась как можно ближе к заданной целевой позиции.
Inverse Kinematics — удобный инструмент в нескольких сценариях анимации: например, их можно использовать для того, чтобы ноги вашего персонажа оставались на земле на неровной поверхности; или чтобы имитировать захват персонажа за объект.Вы также можете использовать их при разработке или прототипировании циклов анимации, чтобы упростить позиционирование костей.
В этой записи блога мы продолжим с того места, где остановились, с введения в 2D-анимацию, используя тот же спрайт Viking.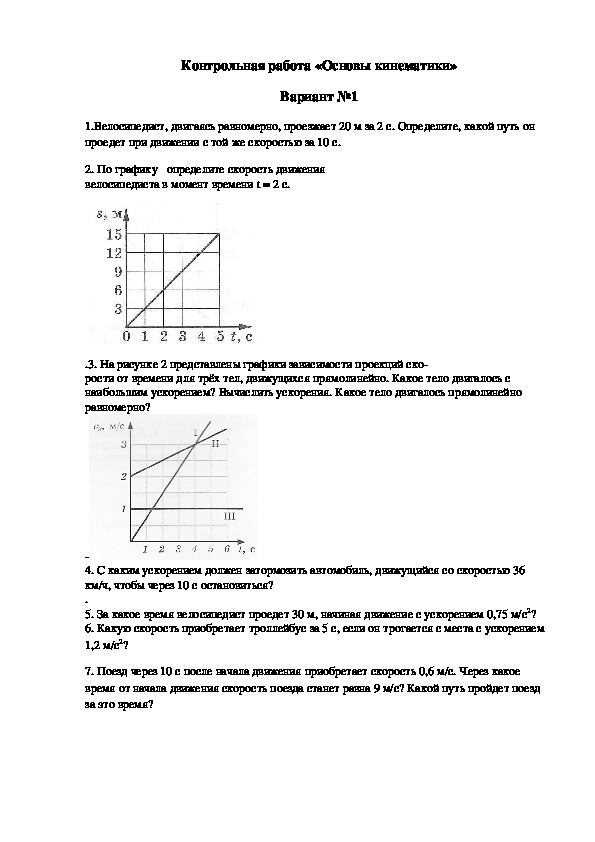 Чтобы начать использовать IK на нашем костяном ригеле, мы начинаем с добавления 2D-компонента IK Manager к самому высокому объекту в иерархии — в нашем случае, оснащенному игровому объекту спрайта, который также содержит компонент Sprite Skin. Кроме того, вы можете прикрепить его к корневой кости оснастки.Когда у нас есть менеджер IK, мы можем использовать кнопки «плюс» и «минус» внизу, чтобы начать добавлять и удалять различные типы решателей IK, применяемые к нашему объекту.
Чтобы начать использовать IK на нашем костяном ригеле, мы начинаем с добавления 2D-компонента IK Manager к самому высокому объекту в иерархии — в нашем случае, оснащенному игровому объекту спрайта, который также содержит компонент Sprite Skin. Кроме того, вы можете прикрепить его к корневой кости оснастки.Когда у нас есть менеджер IK, мы можем использовать кнопки «плюс» и «минус» внизу, чтобы начать добавлять и удалять различные типы решателей IK, применяемые к нашему объекту.
Добавление IK-решателей
Прежде чем мы продолжим, вот краткий обзор терминологии, которая будет использоваться в этом сообщении в блоге, когда речь идет об обратной кинематике, чтобы убедиться, что мы находимся на одной странице:
Цепочка IK относится к группе костей, связанных друг с другом, на которую будет воздействовать алгоритм IK.Примером цепочки костей может быть рука или нога персонажа, однако она не ограничивается только конечностями — цепочка может охватывать любое количество костей, от самой дальней кости до корня.
Эффектор — это конечная кость или последний дочерний элемент в цепи IK. Цель алгоритма IK — максимально приблизить эффектор к цели. Примером эффектора может быть кость кисти или кость пальца в более детальном скелете.
Цель или цель относится к целевой позиции в мировом пространстве, которую мы хотим, чтобы эффектор достиг в результате выполнения алгоритма. Например, если вы хотите, чтобы персонаж схватился за объект оружия, вы должны использовать его положение в качестве цели.
Теперь нам нужно принять решение о наиболее подходящем решателе IK для нашего варианта использования. Решатель IK в этом случае просто обращается к алгоритму, который мы используем для поворота костей в цепочке IK, либо до тех пор, пока эффектор не окажется в целевой позиции, либо пока у нас не закончатся итерации.Существует множество различных алгоритмов IK, и вы, конечно, можете написать свои собственные. По умолчанию пакет IK от Unity поставляется с тремя распространенными типами решателей, что упрощает настройку IK.
По умолчанию пакет IK от Unity поставляется с тремя распространенными типами решателей, что упрощает настройку IK.
Во-первых, у нас есть CCD или решатель циклического спуска координат. Это один из самых популярных алгоритмов ИК для игр. Он работает, перебирая все кости в цепочке одну за другой, начиная с эффекторного конца цепочки, и выполняет вращение каждой из них, чтобы быть как можно ближе к цели, пока эффектор не достигнет цели или мы достигли максимально допустимого количества итераций.
Чтобы настроить решатель CCD, нам нужно сначала добавить его в компонент IK Manager. После этого в иерархии вы увидите, что «New CCDSolver2D» связан с нашим спрайтовым объектом. Теперь мы можем настроить, как он себя ведет и на какие кости он повлияет. Давайте продемонстрируем, как можно добавить ИК к одной из рук нашего викинга. Для этого выберите последнюю кость в цепочке рук и в иерархии создайте новый пустой объект преобразования ( Щелкните правой кнопкой мыши > Создать пустой ). Новый объект должен быть автоматически привязан к кости.Теперь вы можете захватить это преобразование и переместить его на кончик кости руки. Он будет и нашей целью, и эффектором.
Новый объект должен быть автоматически привязан к кости.Теперь вы можете захватить это преобразование и переместить его на кончик кости руки. Он будет и нашей целью, и эффектором.
Теперь, если мы выберем наш недавно добавленный решатель CCD, нам нужно будет настроить несколько вещей. Во-первых, у нас есть возможность назначить наши игровые объекты Target и Effector. Вы можете взять пустой игровой объект, который вы создали ранее, и поместить его в поле Target. По сути, это будет последним преобразованием в нашей цепочке IK и будет вращать кончик кости руки нашего персонажа по направлению к нашей цели.
Следующим шагом является назначение желаемой длины цепочки для нашего решателя IK. Как только вы начнете перетаскивать ползунок, вы увидите, как желтые штуковины появляются вдоль частей скелета, которые составляют цепочку. В этом случае длина нашей цепочки будет равна 4 — у нас есть преобразование кончика руки, кости кисти, а также костей нижней и верхней части руки. Когда вы будете довольны своей цепочкой, вы можете использовать кнопку Create Effector, чтобы автоматически сгенерировать преобразование, для которого будет достигнута наша цепочка IK.
Когда вы будете довольны своей цепочкой, вы можете использовать кнопку Create Effector, чтобы автоматически сгенерировать преобразование, для которого будет достигнута наша цепочка IK.
И все — теперь вы можете использовать новую штуковину IK, появившуюся у викинга, для изменения цели, и решение IK отреагирует соответствующим образом.
Вы заметите некоторые другие настройки, доступные в решателе CCD. В их числе:
Итерации — этот параметр определяет максимальное количество итераций, которые алгоритм будет выполнять, если он не сможет достичь цели раньше. Мы должны помнить, что большинство решателей — это итерационные алгоритмы, поэтому нам нужно установить здесь ограничение для случая, когда цель никогда не может быть достигнута. Если вы используете IK во время выполнения, возможно, стоит держать итераций на довольно низком уровне; однако, если вы используете его только для позиционирования в анимации, вы можете в значительной степени увеличить количество итераций до нужного вам значения при записи анимации.
Допуск — определяет максимально допустимое расстояние, на котором эффектор может находиться от цели, чтобы алгоритм IK считался завершенным.
Скорость определяет силу вращения, выполняемого на каждой итерации алгоритма. Как правило, более высокие значения скорости означают, что цель достигается быстрее.
Наконец, значение Weight определяет общую силу применяемого решения IK, и на него дополнительно влияет глобальный параметр Weight в компоненте диспетчера IK.
Если вы не хотите, чтобы кончик руки персонажа вращался с IK, и хотите, чтобы запястье располагалось только в определенной точке, вы можете вместо этого использовать кость руки в поле Target и создать на ее основе эффектор. Затем либо снимите флажок Constrain Rotation , чтобы иметь возможность позиционировать кость вручную, либо вместо этого поверните эффектор.
Пакет 2D IK включает другой тип решателя IK, который особенно полезен при анимации персонажей-гуманоидов, называемый решателем Limb .Это модифицированная версия алгоритма CCD, ограниченная цепочкой из трех преобразований. Он идеально подходит для позиционирования конечностей, а также включает в себя возможность «перевернуть» результат IK в случае, если суставы конечностей смотрят в неправильную сторону; однако он не включает столько параметров настройки, сколько включенный алгоритм CCD.
У нас также есть решатель FABRIK , который обозначает прямую и обратную обратную кинематику . Этот алгоритм сначала выполняет обратный проход по цепочке, начиная с эффектора у цели; а затем прямой проход от самой высокой кости в иерархии, применяя правильную длину к точкам, полученным во время обратного прохода.FABRIK обычно требует меньше итераций для достижения цели, чем CCD, но медленнее на итерацию, если к цепочке применяются ограничения вращения.
Если вы хотите узнать больше об обратной кинематике и о том, как работает алгоритм CCD, вы можете посмотреть видео об этом в трехмерном контексте, представленное Джеймсом Букли на Unite Berlin 2018. Джеймс также объясняет свою идею модификации исходного алгоритма CCD.
Как упоминалось ранее, вы можете писать собственные 2D-решатели и строить их поверх существующих в пакете.Для получения дополнительных сведений об этом см. Предварительную документацию, доступную на GitHub. Это даст вам хорошее представление о том, с чего начать!
Также стоит отметить, что в случае, если у вас есть два разных решателя, влияющих на одну или несколько одинаковых костей, приоритет IK определяется порядком, в котором решатели расположены в диспетчере IK, с элементами ближе к началу список с наивысшим приоритетом.
Кроме того, важно помнить, что даже если вы удалите решатели IK, позиция по умолчанию не будет возвращена объекту, если вы не установили их ключевые кадры в анимации, так что это форма деструктивного редактирования.В случаях, когда вы хотите отменить эффекты решения IK, мы включаем опцию Restore Default Pose , чтобы восстановить кости до точки до применения IK. Как только это будет сделано, вы можете безопасно удалить решатель IK.
Использование IK в анимации
Если вы хотите использовать IK в анимационных клипах, позиции эффекторов IK также будут добавлены к анимации в качестве ключевых кадров при их изменении — при условии, что эффекторы являются дочерними элементами главного анимированного GameObject.Вы можете добавить ключевые кадры для всех ваших эффекторов IK в начале, но если вы захотите позже их удалить — вам нужно будет создать ключевые кадры для костей, измененных эффектором, и только затем удалить IK. Таким образом, вы по-прежнему сохраните преобразования ваших костей в нужном месте; но имейте в виду, что кости могут поступать в преобразования по-разному, поскольку больше не существует решения IK, применяемого для каждого кадра анимации (если вы не добавляете ключи на каждом этапе пути).
Вот и все! Теперь вы полностью готовы использовать обратную кинематику с анимацией.Стоит отметить, что этот инструмент можно использовать за пределами 2D-анимации, хотя его функции определенно хорошо сочетаются друг с другом. Как всегда, вы можете экспериментировать и находить собственные творческие способы использования IK. Вот пример того, что вы можете получить, если попытаетесь прикрепить коллайдеры к эффекторам ИК:
Дополнительные ресурсы и отзывы
Проблема прямой кинематики
— TTU Advanced Robotics
В задаче прямой кинематики преобразование, описывающее положение и ориентацию инструмента или конечного эффектора, определяется известными переменными соединения.Переменные сочленения связаны с конкретной осью или сочленением и обозначаются q i . В роботах-манипуляторах используются два распространенных типа шарниров — поворотные и призматические. Для шарнирного соединения q i — это угол поворота ($ \ Theta $ i ), а для призматического соединения q i — это смещение шарнира (d i ).
Представительство Денавита-Хартенберга
Соглашение Денавита-Хартенберга (соглашение DH) обычно используется для определения систем отсчета для серийных роботов-манипуляторов.Это соглашение основано на двух предположениях:
- Dh2 : ось Z будет проходить вдоль стыка. Согласно Спонгу, ось z i-1 проходит вдоль сустава i. Например, ось x 1 перпендикулярна оси z o .
- Dh3 : оси x лежат вдоль общих нормалей между осями соединения. Согласно Спонгу, ось z i-1 проходит вдоль сустава i. Например, ось x 1 пересекает ось z 0 .
Таблица параметров канала DH
| Ссылка i | $ \ alpha $ i | a i | d i | $ \ Theta $ и |
|---|---|---|---|---|
| 1 | Угол между z o и z 1 измеренный примерно x 1 | Расстояние от z o до z 1 , измеренное по x 1 | Расстояние от x o до x 1 , измеренное по оси z o | Угол между x o и x 1 измерено примерно по z o |
| 2 | Угол между z 1 и z 2 измеренный примерно x 2 | Расстояние от z 1 до z 2 , измеренное по x 2 | Расстояние от x 1 до x 2 , измеренное по оси z 1 | Угол между x 1 и x 2 измерено примерно по оси z 1 |
| n | Угол между z n и z n + 1 измеряется примерно x n + 1 | Расстояние от z n до z n + 1 , измеренное по x n + 1 | Расстояние от x n до x n + 1 , измеренное по оси z n | Угол между x n и x n + 1 измерен примерно по z n |
Для манипулятора сначала должна быть установлена система отсчета.Рамки также предназначены для остальных сочленений манипулятора и концевого эффектора. Каждый кадр i перемещается со ссылкой i и прикрепляется к концу ссылки. Необходимо интерпретировать расположение начала каркаса, потому что они не всегда лежат в середине стыка. Чтобы выполнить преобразование из кадра i-1 в кадр i:
- Повернуть вокруг оси z i-1 на $ \ theta $ i
- Перевести по оси z i-1 на d i
- Перевести по оси x i на i
- Повернуть вокруг оси x i на $ \ alpha $ i
Рисунок 1: Робот-манипулятор
При выполнении преобразования порядок шагов важен для вращения, но не для перевода.{0} \\ 0 & 1 \\ \ end {array}} \ right] \ end {align}
, где R 1 o — это рамка ориентации 1 по отношению к кадру 0 (базовая рамка), а o 1 o — позиция кадра 1 относительно базовой рамки. Матрицу A можно переписать, используя соответствующие преобразования для поворотов и перемещений кадра.
(2)\ begin {align} A _ {\ rm i} = \ left [{\ begin {array} {cccc} c \ theta _ {\ rm i} & -s \ theta _ {\ rm i} & 0 & 0 \\ s \ theta _ {\ rm i} & c \ theta _ {\ rm i} & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \ end {array} } \ right] \ left [{\ begin {array} {cccc} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & d _ {\ rm i} \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ left [{\ begin {array} {cccc} 1 & 0 & 0 & a _ {\ rm i} \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ left [{\ begin {array} {cccc} 1 & 0 & 0 & 0 \ \ 0 & c \ alpha _ {\ rm i} & -s \ alpha _ {\ rm i} & 0 \\ 0 & s \ alpha _ {\ rm i} & c \ alpha _ {\ rm i} & 0 \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ end {align}
Наиболее распространенное представление задачи прямой кинематики основано на соглашении D&H и приведено ниже,
(3)\ begin {align} T _ {\ rm i} ^ {i-1} = \ left [{\ begin {array} {cccc} c \ theta _ {\ rm i} & -s \ theta _ {\ rm i} c \ alpha _ {\ rm i} & s \ theta _ {\ rm i} s \ alpha _ {\ rm i} & a _ {\ rm i} c \ theta _ {\ rm i} \\ s \ theta _ {\ rm i} & c \ theta _ {\ rm i} c \ alpha _ {\ rm i} & -c \ theta _ {\ rm i} s \ alpha _ {\ rm i} & a _ {\ rm i} s \ theta _ {\ rm i} \\ 0 & s \ alpha _ {\ rm i} & c \ alpha _ {\ rm i} & d _ {\ rm i} \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ end {align}
с параметрами D&H, присвоенными согласно Spong et.al. условное обозначение (кадр i на стыке i-1). Преобразование T i i-1 является произведением матриц вращения и переноса матрицы A i . Верхняя левая матрица преобразования 3×3 соответствует ориентации концевого эффектора по отношению к базовой раме. Три столбца этой матрицы указывают направление осей x, y и z слева направо. Матрица 3×1 в верхнем правом углу показывает расположение концевого зажима по отношению к базовой раме.
Сводная информация о создании прямой кинематики робота
Общая процедура получения кинематики поступательного движения серийного робота-манипулятора состоит из следующих шагов:
- Обозначьте все стыки от i = 1 до n.
- Назначьте оси Z для суставов от 0 до n-1 (z o вдоль сустава 1 и т. Д.).
- Назначьте x o по нормали к z o .
- Назначьте x 1 через x n-1 , которые лежат на общих нормалях между z o и z n-1 .
- Установите y 1 на y n-1 для завершения каждого кадра.
- Назначьте z n свободно (но осторожно) и определите x n .
- Создайте таблицу параметров звена DH, указав $ \ alpha $ i , a i , d i и $ \ theta $ i для каждого соединения.
- Создайте T i i-1 для i = от 1 до n.
- Решить T n o = T 1 o * T 2 1 *… * T n n-1 .
- Покажите положение как последний столбец T n o и ориентацию как первые три столбца T n o .
Пример прямой кинематики
Рисунок 2: Робот-манипулятор
Для шарнирного соединения шарнир является осью вращения. Для призматического соединения соединение находится на траектории движения соединения.
Рисунок 3: Робот-манипулятор с назначениями шарниров и рамы
DH Стол
| Ссылка i | $ \ alpha $ i | a i | d i | $ \ Theta $ и | T i i-1 |
|---|---|---|---|---|---|
| 1 | 90 | 0 | д 1 | $ \ Theta $ 1 * | T 1 o |
| 2 | 0 | 0 | д 2 * | 0 | Т 2 1 |
| 3 | 0 | 0 | д 3 | $ \ Theta $ 3 * | Т 3 2 |
Примечание: * обозначает изменяемые параметры соединения.{0} = \ left [{\ begin {array} {cccc} c _ {\ rm 1} & 0 & s _ {\ rm 1} & 0 \\ s _ {\ rm 1} & 0 & -c _ {\ rm 1} & 0 \\ 0 & 1 & 0 & d _ {\ rm 1} \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ left [{\ begin {array } {cccc} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & d _ {\ rm 2} \\ 0 & 0 & 0 & 1 \\ \ end {массив }} \ right] = \ left [{\ begin {array} {cccc} c _ {\ rm 1} & 0 & s _ {\ rm 1} & s _ {\ rm 1} d _ {\ rm 2} \\ s _ {\ rm 1} & 0 & -c _ {\ rm 1} & -c _ {\ rm 1} d _ {\ rm 2} \\ 0 & 1 & 0 & d _ {\ rm 1 } \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ end {align}
(7)\ begin {align} T _ {\ rm 3} ^ {0} = T _ {\ rm 1} ^ {0} T _ {\ rm 2} ^ {1} T _ {\ rm 3} ^ {2 } = T _ {\ rm 2} ^ {0} T _ {\ rm 3} ^ {2} \ end {align}
(8)\ begin {align} T _ {\ rm 3} ^ {0} = \ left [{\ begin {array} {cccc} c _ {\ rm 1} & 0 & s _ {\ rm 1} & s _ {\ rm 1} d _ {\ rm 2} \\ s _ {\ rm 1} & 0 & -c _ {\ rm 1} & -c _ {\ rm 1} d _ {\ rm 2} \\ 0 & 1 & 0 & d _ {\ rm 1} \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ left [{\ begin {array} {cccc} c _ {\ rm 3} & -s _ {\ rm 3} & 0 & 0 \\ s _ {\ rm 3} & c _ {\ rm 3} & 0 & 0 \\ 0 & 0 & 1 & d _ {\ rm 3 } \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ end {align}
(9)\ begin {align} T _ {\ rm 3} ^ {0} = \ left [{\ begin {array} {cccc} c _ {\ rm 1} c _ {\ rm 3} & -c _ {\ rm 1} s _ {\ rm 3} & s _ {\ rm 1} & s _ {\ rm 1} (d _ {\ rm 2} + d _ {\ rm 3}) \\ s _ {\ rm 1} c _ {\ rm 3} & -s _ {\ rm 1} s _ {\ rm 3} & -c _ {\ rm 1} & -c _ {\ rm 1} (d _ {\ rm 2 } + d _ {\ rm 3}) \\ s _ {\ rm 3} & c _ {\ rm 3} & 0 & d _ {\ rm 1} \\ 0 & 0 & 0 & 1 \\ \ end {array}} \ right] \ end {align}
Матрица вращения (первые 3 столбца T 3 o ) задается как
(10)\ begin {align} T _ {\ rm 3} ^ {0} = \ left [{\ begin {array} {ccc} c _ {\ rm 1} c _ {\ rm 3} & -c _ {\ rm 1} s _ {\ rm 3} & s _ {\ rm 1} \\ s _ {\ rm 1} c _ {\ rm 3} & -s _ {\ rm 1} s _ {\ rm 3} & -c _ {\ rm 1} \\ s _ {\ rm 3} & c _ {\ rm 3} & 0 \\ \ end {array}} \ right] \ end {align}
, а матрица перевода (столбец 4 -й ) —
(11)\ begin {align} T _ {\ rm 3} ^ {0} = \ left [{\ begin {array} {ccc} s _ {\ rm 1} (d _ {\ rm 2} + d _ {\ rm 3}) \\ -c _ {\ rm 1} (d _ {\ rm 2} + d _ {\ rm 3}) \\ d _ {\ rm 1} \\ \ end {array}} \ right ] \ end {align}
MATLAB также может использоваться для определения преобразований с помощью определяемого пользователем символьного набора инструментов.Этот символический набор инструментов содержит переменные параметры для робота-манипулятора. Код MATLAB для примера 1 доступен ниже. Код может быть изменен и расширен, чтобы определять трансформации серийных рычагов с шестью степенями свободы. (См. Анализ последовательного манипулятора манипулятора для анализа последовательного манипулятора с 6 степенями свободы.)
Код MATLAB: преобразование
% Определение символьных переменных
syms theta1 theta3 l2 d1 d2 d3
% Определите преобразования:
T1_0 = [cos (theta1), 0, sin (theta1), 0;
sin (theta1), 0, -cos (theta1), 0;
0, 1, 0, d1;
0, 0, 0, 1];
T2_1 = [1, 0, 0, 0;
0, 1, 0, 0;
0, 0, 1, d2;
0, 0, 0, 1];
T3_2 = [cos (theta3), -sin (theta3), 0, 0;
sin (theta3), cos (theta3), 0, 0;
0, 0, 1, d3;
0, 0, 0, 1];
% Определить преобразование
T2_0 = T1_0 * T2_1;
T2_0 = простой (T2_0)
T3_0 = T2_0 * T3_2;
T3_0 = простой (T3_0)
После выполнения программы вывод должен быть следующим:
T2_0 =
[cos (theta1), 0, sin (theta1), sin (theta1) * d2]
[sin (theta1), 0, -cos (theta1), -cos (theta1) * d2]
[0, 1, 0, d1]
[0, 0, 0, 1]
T3_0 =
[cos (theta1) * cos (theta3), -cos (theta1) * sin (theta3), sin (theta1), sin (theta1) * (d3 + d2)]
[sin (theta1) * cos (theta3) , -sin (theta1) * sin (theta3), -cos (theta1), -cos (theta1) * (d3 + d2)]
[sin (theta3), cos (theta3), 0, d1]
[0, 0, 0, 1]
Список литературы
Библиография
1.Губка и др. Моделирование и управление роботами.
2 ВЫЧИСЛЕНИЯ — 1
Страниц: | 1 || 3 |Периферийные устройства — это физические устройства, подключенные к компьютеру. Они включают устройства ввода / вывода, а также устройства хранения. Устройства ввода позволяют нам передавать информацию на компьютер; например, клавиатура и мышь. Устройства вывода позволяют нам извлекать результаты из компьютера; например, мы можем видеть результат на мониторе или в распечатанном виде.Вторичные запоминающие устройства, такие как гибкие, жесткие и оптические диски, используются для постоянного хранения информации. Например, мы используем компакт-диски и DVD-диски для хранения больших объемов информации.
2. Сопоставьте эти изображения устройств ввода с их названиями.
1. джойстик 4. считыватель штрих-кода 7. графический планшет 10. цифровая камера 2. трекербол 5. сканер 8. сенсорный экран 11. микрофон 3. клавиатура 6. мышь 9. световое перо 3. Каждый текст описывает одно из этих устройств: трекербол, джойстик, световое перо, сканер.
Укажите устройство, которое описывает каждый текст. Запишите свои ответы в эту таблицу. Затем сравните свои ответы с ответами других студентов.
Текстовое устройство 1) A — еще одно устройство ввода, которое можно подключить к компьютерной системе. Он может двигаться в восьми направлениях. s в основном используются в компьютерных играх для управления движением изображения на экране. Иногда к компьютеру подключены два человека, поэтому в игру могут играть два человека одновременно.
2) А работает точно так же, как мышь, за исключением того, что шарик находится сверху.Пользователь катит мяч рукой, чтобы управлять им. Если вы используете a, вам не нужно дополнительное пространство на столе, чтобы перемещать его (как при использовании мыши). s часто используются на небольших портативных компьютерах и некоторых игровых автоматах.
3) A можно использовать для рисования изображений непосредственно на экране компьютера или для считывания рисунка на штрих-коде. Устройство, которое может считывать штрих-коды, обнаруживает разницу между светом, отраженным от черной линии штрих-кода, и ее более светлым фоном.
4) С помощью a вы можете вводить распечатанные рисунки, фотографии или текст прямо в компьютер.A работает как копировальный аппарат: свет падает на материал и обнаруживает отраженный свет. Вы можете использовать программное обеспечение с оптическим распознаванием символов (OCR) для ввода отсканированного текста в текстовый редактор.
Языковая работа: Present Simple Изучите эти утверждения о ключах.
1. Эта клавиша перемещает курсор вниз.
2. Эта клавиша копирует экранное изображение.
3. У этой клавиши нет фиксированной функции.
Глаголы, выделенные курсивом, в Present Simple.Мы используем Present Simple для описания вещей, которые всегда верны.
5. Просмотрите утверждения (1-7) и исправьте те, которые неверны.
Пример Эта клавиша перемещает курсор вниз.
Не перемещает курсор вниз. Он перемещает курсор вверх.
Если вы не уверены, спросите другого ученика.
Что делает эта клавиша 1 Эта клавиша перемещает курсор вниз.
2 Эта клавиша перемещает курсор вправо.
3 Del Эта клавиша вставляет символ.
Del Print 4 Print Эта клавиша копирует изображение на экране.
Экран Экран Page 5 Эта клавиша перемещает экран вверх.
Down Home 6 У этой клавиши нет фиксированной функции.
Caps Lock 7 Выдает все буквы в нижнем регистре.
6. Опишите, что делают эти ключи.
Page 1 2 3 Вверх Удалить 7. Прочтите отрывок о компьютерной мыши. Заполните пропуски глаголами из списка.
щелкните дважды щелкните перетащить захват выбрать управление перемещением Мышь позволяет вам (1) перемещать курсор и очень быстро перемещаться по экрану.Выполнение тех же движений с помощью клавиш со стрелками на клавиатуре займет гораздо больше времени. Когда вы (2) наводите указатель мыши на столе, указатель на экране перемещается в том же направлении. Указатель обычно выглядит как I-образная полоса, стрелка или указывающая рука, в зависимости от того, что вы делаете.
Мышь имеет одну или несколько кнопок для связи с компьютером. Например, если вы хотите разместить точку вставки или выбрать параметр меню, вы просто (3) нажимаете кнопку мыши, и этот параметр выбирается.
Мышь используется для (4) текста и элементов на экране.Вы можете выделить текст, который нужно удалить, или вы можете выбрать элемент из флажка или анкеты.
Мышь широко используется в графике и дизайне. Если вы хотите переместить изображение, вы помещаете указатель на объект, который хотите переместить, нажимаете кнопку мыши и (5) изображение в новое место на экране. Точно так же мышь используется для изменения формы графического объекта. Например, если вы хотите преобразовать квадрат в прямоугольник, вы (6) один угол квадрата и растягиваете его в прямоугольник.
Мышь также используется для запуска программы или открытия документа: вы наводите указатель на имя файла и (7) на имя файла, то есть вы быстро нажимаете и дважды отпускаете кнопку мыши.
8. Задайте своему партнеру 5 вопросов о компьютерной мыши.
9. Прочтите текст и заполните приведенную ниже таблицу.
Есть много разных типов принтеров. К ним относятся струйные, монолазерные принтеры и принтеры для сублимации красителей. По сути, вы получаете то, за что платите. Чем больше вы платите, тем лучше принтер.
Струйные принтеры — самые дешевые, но их качество печати не так хорошо, как у двух других типов принтеров. Они дороже в эксплуатации по сравнению с монохромными лазерными принтерами, но могут печатать в цвете. Струйные принтеры — самые шумные из трех типов принтеров.
Монохромные лазерные принтеры дороже струйных принтеров, но обеспечивают лучшее качество черно-белой печати. Они не могут печатать в цвете, но являются самым быстрым типом принтера и дешевле всего в эксплуатации.
Сублимационные принтеры на красителях — самый дорогой тип принтеров, но их качество печати чрезвычайно высокое.Они тихие в работе, но относительно медленные и очень дорогие в эксплуатации.
Тип Скорость печати Рабочий шум Цена Уровень качества цвета Уровень затрат Струйный самый низкий медленнее, чем у лазера Монохромный лазер высокий тихий Краситель медленный да Сублимация 10. Прочтите текст и попытайтесь угадать значение любых новых слов в поле ниже.
При необходимости см. Словарь.
точек пикселей разрешение дисплея электронно-лучевая трубка сканирование электронного луча (глагол) частота обновления герц мерцание побитовая визуализация Монитор Символы и изображения, которые мы видим на экране, состоят из точек, также называемых элементами изображения (пикселями).Общее количество пикселей, на которое дисплей разделен по горизонтали и вертикали, называется разрешением. Если количество пикселей очень велико, мы получаем дисплей с высоким разрешением и, следовательно, четкое изображение.
Если количество пикселей мало, получается низкое разрешение.
Типичное разрешение — 640480 или 1024768 пикселей. Плотность пикселей влияет на изображение: большое количество пикселей дает гораздо более четкое изображение.
Электронно-лучевая трубка монитора очень похожа на трубку телевизора.Внутри трубки находится электронный луч, который сканирует экран и включает или выключает пиксели, составляющие изображение. Луч начинается в верхнем левом углу и сканирует экран слева направо в непрерывной последовательности, похожей на движение наших глаз при чтении, но намного быстрее. Эта последовательность повторяется 50, 70 или 85 раз в секунду, в зависимости от системы. Если частота повторения невелика, мы можем увидеть мерцающий, неустойчивый экран, что может вызвать утомление глаз. Однако быстрая частота обновления 75 Гц устраняет это раздражающее мерцание.
То, что мы видим на экране, создается и сохраняется в области ОЗУ, так что каждому пикселю выделяется ячейка памяти. Этот тип отображения называется растровым. На монохромных мониторах биты 0 отображаются как белые точки, а биты 1 как черные точки.
На цветных дисплеях сзади трубки монитора расположены три электронных пушки. Каждая пушка выпускает пучок электронов каждого из основных цветов: красного, зеленого и синего. Эти электроны ударяются о внутреннюю часть экрана, покрытого веществами, называемыми люминофором, которые светятся при ударе электронов.Три разных люминофорных материала используются для красного, зеленого и синего цветов. Чтобы создать разные цвета, меняют интенсивность каждого из трех электронных лучей.
Монитор управляется отдельной печатной платой, известной как адаптер дисплея, которая подключается к материнской плате компьютера. Разные платы управляют разными типами дисплеев. Например, карта VGA (видеографический массив) стала стандартом для цветных мониторов.
Сейчас в моде мониторы с плоским экраном.По своей сути они плоские, поэтому занимают меньше места. Кроме того, они обеспечивают четкое изображение и устраняют мерцание экрана.
В портативных компьютерах вместо кинескопа используется плоский жидкокристаллический дисплей (ЖКД). ЖК-дисплей использует сетку кристаллов и поляризационные фильтры для отображения изображения. Кристаллы в разной степени блокируют свет, создавая точки на изображении.
11. Прочтите текст еще раз и ответьте на эти вопросы.
1. По словам автора, какое значение имеет разрешение пикселей 2.Какая единица частоты используется для измерения частоты обновления монитора 3. По мнению авторов, почему низкая частота обновления может вызывать утомление глаз 4. Какое вещество поражается электронами в мониторе 5. Для чего используется стандартная система отображения много ПК 6. Что означает ЖК-дисплей Какие типы компьютеров используют ЖК-дисплеи 12. Типы приводов. Посмотрите на иллюстрации и узнайте:
1 размер дискеты 2 емкость дискеты высокой плотности 3 имя жесткого диска 4 емкость хранилища SyQyest 5 система, вмещающая ленты 10 ГБ 6 a тип привода, используемый цифровыми фотоаппаратами и музыкальными проигрывателями.
3,5-дюймовая дискета Жесткий диск Съемный жесткий диск Гибкий диск высокой плотности (HD) Большинство ПК имеют один жесткий диск, называемый популярными дисками — Zip может хранить 1,44 МБ информации. Диск C. Используется для хранения программного обеспечения и Jaz-систем. В дисководе гибких дисков используются файлы на 3,5-дюймовых дисках, организованные удобным способом. Iomega. Syquest и его называемый диск A. На жестком диске можно разместить несколько картриджей, вмещающих 1,5 ГБ.
гигабайта данных Ленточный накопитель Карманный накопитель Microdrive Ленточный накопитель хранит данные на ленте Сверхпортативные накопители используются с Microdrive — это самые маленькие картриджи.Используется для резервного копирования мобильных компьютеров. Они вмещают 40 МБ жесткого диска для цифровых фотоаппаратов. Цифровые аудиокассеты. Система Peerless может содержать ноутбуки и аудиоплееры. На нем может храниться до 10 ГБ данных. Диски объемом 20 ГБ, что позволяет вам иметь размер 340 МБ и 1 ГБ для хранения тысяч файлов MP3 и емкости. Он использует компьютерные видеоигры. Карточный адаптер.
13а. Сопоставьте инструкции с картинками.
1. Защищайте дискеты от высоких температур.
2. Перед открытием файлов, полученных из Интернета или по электронной почте, проверьте, нет ли вирусов.
3. Храните резервные копии (резервные копии) ваших данных.
4. Магнитные поля могут повредить информацию, хранящуюся на дисках. Не оставляйте их возле телефона.
5. Храните диски вдали от воды и влаги.
6. При обращении с компакт-дисками или DVD-дисками держите диски за края.
13б. В парах сообщайте друг другу, что вы должны или не должны делать для защиты своих данных.
Пример Нельзя ставить диски друг на друга.
1 диски в защитном футляре 2 аккуратно вставить в дисковод 3 рядом с магнитами; они могут повредить хранящуюся на них информацию 4 регулярно обновлять антивирусную программу, поскольку новые вирусы создаются каждый день 5 пароли и устройства безопасности для защиты конфиденциальной информации 14a.Прочтите текст и сравните термины слева с пояснениями справа.
1 резервное хранилище a) каталог, в котором хранится каждый фрагмент данных и как его найти 2 дискеты b) записывающие головки 3 дисковод c) форматирование вторичной памяти 4 d) каталог дискет 5 e) инициализация; установка дорожек и секторов на магнитных дисках 6 головок чтения / записи f) устройство, которое вращает диски и содержит головку чтения / записи. Технические детали Дискеты называются так потому, что они состоят из гибкого пластикового материала с намагничивающейся поверхностью.
Поверхность диска делится на концентрические круги или дорожки, которые затем делятся на сектора. Когда вы вставляете чистый диск в дисковод, он должен быть инициализирован или отформатирован, прежде чем на него можно будет записать информацию. Это означает, что магнитные области создаются для каждой дорожки и сектора вместе с каталогом или каталогом, в котором будет записано конкретное расположение файлов.
Когда вы сохраняете файл, операционная система перемещает головки чтения / записи диска в сторону пустых секторов, записывает данные и записывает запись для каталога.Позже, когда вы открываете этот файл, ОС ищет его запись в каталоге, перемещает головки чтения / записи в правильные сектора и считывает файл в область ОЗУ.
Жесткие диски работают так же, как и дискеты. Но у них есть важные преимущества: они могут хранить гораздо больше данных и вращаться с более высокой скоростью, поэтому вы можете хранить и извлекать информацию намного быстрее, чем с дискет. Скорость, с которой жесткий диск находит данные, называется временем доступа или временем поиска. Среднее время доступа измеряется в миллисекундах (мс).Большинство жестких дисков имеют время доступа от 8 до 14 мс.
Необходимо различать время доступа (например, 9 мс) и скорость передачи данных (средняя скорость, необходимая для передачи данных с дисковой системы в ОЗУ, например, 10 мегабит в секунду). Помните, что скорость передачи зависит также от мощности вашего ПК.
Если вы используете только текстовые редакторы, вам потребуется меньше места для хранения, чем при использовании программ САПР, звука и анимации. Если вам нужен дополнительный жесткий диск, вам следует подумать о типе механизма.Существуют внутренние и внешние накопители, которые представляют собой жесткие диски, запечатанные в приводном блоке, внутри или прикрепленные к компьютеру.
Другой тип жесткого диска, известный как съемный, позволяет записывать данные на картриджи, которые можно извлекать и хранить в автономном режиме в целях безопасности.
Некоторые системы позволяют создавать резервные копии всего ПК на одном диске.
В ноутбуках используются накопители карманного размера. Цифровые фотоаппараты и музыкальные плееры используют микроприводы со специальными картами.
14б.Теперь прочтите эти предложения и решите, истинны они (T) или ложны (F).
1. Жесткие диски быстрее гибких дисков.
2. Время доступа — это среднее время, необходимое записывающим головкам для перемещения и доступа к данным.
3. Время доступа и скорость передачи данных у мужчин одинаковые.
4. В жестких дисках используются жесткие вращающиеся диски.
5. Жесткий диск примерно в 20 раз быстрее дисковода гибких дисков.
6. Если вы используете мультимедийные приложения, вам потребуется такая же емкость памяти, как и для текстовых процессоров.
7. Съемные картриджи не подлежат транспортировке.
15. Посмотрите на группы слов и решите, к какому классу принадлежит каждое слово: существительное, глагол, прилагательное или наречие. Закончите предложения.
магнит магнитный магнитный магнетизм намагниченный 1. это наука о магнитных явлениях и свойствах.
2. Дискеты и жесткие диски считаются запоминающими устройствами.
3. Данные записываются на диск в виде точек, называемых битами.
рекордер запись записана 4.Все диски должны быть инициализированы, прежде чем на них будет записана информация.
5. Головки следуют по дорожкам и намагничивают покрытие вдоль каждой дорожки.
6. Дисковод работает очень похоже на магнитную ленту, которую можно воспроизводить и записывать.
фрагмент фрагментации дефрагментатор фрагментирован 7. После создания, удаления и изменения большого количества файлов жесткий диск становится _ с фрагментами, разбросанными по всему диску.
8. снижает скорость доступа к данным, потому что дисководу приходится работать тяжелее, чтобы найти части файла, хранящиеся в разных местах.
9. Чтобы распознать жесткий диск, вы можете использовать оптимизатор диска или _; это запишет ваши файлы в непрерывные кластеры.
16. Перед чтением текста постарайтесь ответить на эти вопросы.
1. Что означает CD-ROM 2. В чем разница между CD-R и CD-RW 3. Как вы произносите эти выражения на вашем языке компакт-диск CD-ROM дисковод лазерная технология стираемый оптический диск 17. Каковы преимущества и недостатки оптических дисков Прочтите текст, чтобы проверить свой ответ.
Оптические диски и приводы Оптические диски могут хранить информацию с гораздо большей плотностью, чем магнитные диски. Таким образом, они идеальны для мультимедийных приложений, где изображения, анимация и звук занимают много места на диске. Кроме того, на них не действуют магнитные поля.
Страниц: | 1 || 3 |Глава 2 — Кинематика — Скачать PDF бесплатно
1 Глава 2 — Кинематика 2.1 Системы отсчета 2.2 Преобразования между BODY и NED 2.3 Преобразования между ECEF и NED 2.4 Преобразования между BODY и FLOW BODY Исследование динамики можно разделить на две части: кинематика, которая рассматривает только геометрические аспекты движения, и кинетика, которая представляет собой анализ сил, вызывающих движение 1
2 Общая цель глав 2–8. Представить динамику 6-степеней свободы в компактной матрично-векторной форме в соответствии с: J M C D g g 0 ветровая волна Обозначения и представление взяты из: Fossen, T.I. (1991). Нелинейное моделирование и управление подводными аппаратами, кандидатская диссертация, кафедра инженерной кибернетики, NTNU, Джун Фоссен, Т. И. (1994). Управление и контроль над морскими транспортными средствами, John Wiley and Sons Ltd. ISBN:
3 2.1 Базовые рамки z e zi, z e N e NED D E BODY e t ECEF / ECI l ECEF / ECI y e ye xi yi x e xe ECI {i}: инерциальная система координат, центрированная вокруг Земли; неускоряющаяся система координат (фиксированная в пространстве), в которой действуют законы движения Ньютона.ECEF {e}: неподвижная рама с привязкой к Земле; origin фиксируется в центре Земли, но оси вращаются относительно инерциальной системы отсчета ECI. NED {n}: рамка «Северо-восток-вниз»; определяются относительно земного эллипсоида (WGS-84). BODY {b}: корпус; подвижная система координат, закрепленная на судне. x b — продольная ось (направленная от кормы к носу) y b — поперечная ось (направленная к правому борту) z b — нормальная ось (направленная сверху вниз) 3
4 2.1 Опорные рамы Фиксированные опорные точки на корпусе CG — Центр тяжести CB — Центр плавучести CF — Центр плавучести CF расположен на расстоянии LCF от CO в направлении x Центром плавучести является центроид площади водной плоскости A wp в спокойной воде. Судно будет катиться и качаться около этой точки. Бескординатный вектор u u 1 n n 1 u 2 n n 2 u 3 n n 3 n i i 1,2,3 — единичные векторы, которые определяют n Координатная форма u в n u n u 1 n, u 2 n, u 3 n 4
5 2.1 Системы отсчета и движения с 6 степенями свободы, силы и линейные, а также положения и моменты глубины резкости угловые скорости Углы Эйлера 1 движения в направлении x (выброс) X ux 2 движения в направлении y (качание) Y vy 3 движения в направлении z- направление (качка) Z wz 4 вращение вокруг оси x (крен, крен) K p 5 вращение вокруг оси y (тангаж, дифферент) M q 6 вращение вокруг оси z (рыскание) N r Обозначения приняты от: ybv (качание) q (шаг) SNAME (1950). Номенклатура для описания движения погруженного тела в жидкости.Общество военно-морских архитекторов и инженеров, Технический и исследовательский бюллетень № 1-5, апрель 1950 г., pp p u (всплеск) x b (крен) r (рыскание) w (качка) 5 z b
6 2.1 Базовые рамки — Обозначение Положение ECEF: pe b / exyz 3 Долгота и широта en l S 2 Положение NED: pn b / n NED 3 Отношение (углы Эйлера) nb S 3 Фиксированное на теле u Фиксированное на теле p линейное bvb / nv 3 угловая bb / nq 3 скорость w скорость r Сила, фиксируемая телом: fbb XYZ 3 Фиксированный момент тела mbb KMN 3 Обобщенное положение, скорость и сила pn b / n или pe b / n), nb bvb / nbb / n, fbbmbb 6
7 2.2 Преобразования между BODY и NED Ортогональные матрицы порядка 3: O3 RR 33, RR RRI Специальная ортогональная группа порядка 3: SO3 RR 33, R ортогональна, а detr 1 Матрица вращения: Пример: RR RRI, detr 1 Поскольку R ортогонален, 1 R до R от 7
8 2.2 Преобразования между BODY и NED Оператор перекрестного произведения как умножение матрицы на вектор: a: Sa S S 3 0 1, где S S — кососимметричная матрица 8
9 2.2 Преобразования между BODY и NED теоремой Эйлера о вращении: R, I 33 sin S 1 cos S 2 1, 2, 3, 1 nvb / n R nbvbb / n, R nb: R, где R 11 1 cos 2 1 cos R 22 1 cos 2 2 cos R 33 1 cos 2 3 cos R 12 1 cos sin R 21 1 cos sin R 23 1 cos sin R 32 1 cos sin R 31 1 cos sin R 13 1 cos sin 9
10 2.2.1 Преобразование угла Эйлера Три основных поворота: 0, 0, 1 0, 1, 0 1, 0, 0 x 3 x 2 u 2 u 3 U v 3 y 3 (1) Вращение относительно угла рыскания относительно z3.Обратите внимание, что w = w. 3 2 v 2 y 2 R z, c s 0 s c (2) Вращение по углу тангажа вокруг y2. Обратите внимание, что v = v. 2 1 x 1 x 2 u 2 U u 1 w 2 c 0 sw 1 R y, s 0 cz 1 z 2 10 R x, cs 0 scw = w 0 z 0 = zb z 1 w 1 v 1 v = v 2 U y 1 y = y 0 b (3) Вращение по углу крена около x1. Отметим, что u 1 = u2.
11 2.2.1 Преобразование угла Эйлера Преобразование линейной скорости (соглашение zyx): npb / n R nbb nb vb / n, где R bn nb: R z, R y, R x, R nb nb 1 R bn nb R x, R y, R z, R bn nb cc sc css ss ccs sc cc sss cs ssc s cs cc Аппроксимация малых углов: R bn nb I 33 S nb
12 2.2.1 Преобразование угла Эйлера Позиции NED (непрерывное время и дискретное время): npb / n R nbb nb vb / npnb / nk 1 pnb / nk hr nb nb kv bb / nk Интегрирование Эйлера Форма компонента: N u coscos vcossinsin sincos wsinsin coscossin Ė u sincos vcoscos sinsinsin wsinsincos cossin D u sin vcossin wcoscos 12
13 2.2.1 Преобразование угла Эйлера Преобразование угловой скорости (соглашение zyx): b nb T nb b / nbb / n 0 R x, 0 R x, R y, 0 0: T 1 nb nb 0 0, где 1 0 s 1 st ct T 1 nb 0 c cs T nb 0 cs 0 s cc 0 s / cc / c Аппроксимация малого угла: Обратите внимание, что: T nb Особая точка при 90 o T 1 nb T nb 13
14 2.2.1 Преобразование угла Эйлера Представления ориентации углов Эйлера: ODE для углов Эйлера: ODE для матрицы вращения b nb T nb b / n R nb R nb S bb / n Форма компонента: pq sin tan rcos tan q cos rsin q sin cos r cos cos , 90o где S bb / n 0 rqr 0 pqp 0 + алгоритм вычисления углов Эйлера по матрице вращения nb ,, R bn nb 14
15 2.2.1 Преобразование угла Эйлера Резюме: кинематические уравнения с 6 степенями свободы: J 3-параметрическое представление npb / n nb R nb nb T nb bvb / nbb / n nb ,, с сингулярностью при 90 o Форма компонента: N u coscos vcossinsin sincos wsinsin coscossin Ė u sincos vcoscos sinsinsin wsinsincos cossin pq sintan rcostan q cos rsin q sin cos r cos cos, 90o D u sin vcossin wcoscos 15
16 2.2.2. 4-параметрическое представление единичных кватернионов: — устраняет сингулярность представления углов Эйлера — числовой эффективный (без тригонометрических функций) Q qqq 1, q ,, 3 и 1, 2, 3 Матрица вращения единичного кватерниона (параметр Эйлера) (Chou 1992 ): R, I 33 sin S 1 cos S 2 cos 2 q 1 2 cos 2 sin 2 Q 1, 2, 3 sin 2 3 R bnq: R, I 33 2S 2S 2 16
17 2.2.2 Устройство Quaternions Преобразование линейной скорости n p b / n R n b b qv b / n NB! должны быть интегрированы при ограничении q q 1 или где R b n q R b n q 1 R b n q Форма компонента (позиции NED): N u v w Ė 2u v w D 2u v w
18 2.2.2 Кватернионы единиц Преобразование угловой скорости Альтернативное представление (Кейн, 1983) b q T q q b / n q 1 2 I 33 S b b / n где T q q, T q qt q q 1 4 I 33 NB! не зависит от цены еще одного параметра Форма компонента: 1 2 1p 2 q 3 r p 3q 2 r p q 1 r p 1 q r Уравнения выводятся с использованием R n b R n b S b b / n
19 2.2.2 Кватернионы модуля Резюме: кинематические уравнения с 6 степенями свободы (7 ОДУ): J 4-параметрическое представление npb / nq R nbq T qqbvb / nbb / nq, 1, 2, 3 Неособое, но требуется еще одно ОДУ Форма компонента : N uvwp 2 q 3 r Ė 2u vw D 2u vwp 3q 2 rpq 1 rp 1 qr 19
20 2.2.2 Единичные кватернионы Алгоритм с дискретным временем для нормализации единичных кватернионов q q Алгоритм (дискретная — временная нормализация единичных кватернионов) 1. k 0. Вычислить начальные значения q k Для простоты, интегрирование Эйлера подразумевает, что 3. Нормализация, где h — время выборки. qk 1 bqk 1 qkh T qqkb / nkqk 1 qqk 1 q 4. Пусть kk 1 и вернемся к шагу 2. Алгоритм непрерывного времени для нормализации единичных кватернионов может быть реализован, если отметить, что d dt qq 2 qb T qqb / n 0 qk 1 кв 1 кв 1 20
21 2.2.2 Единичные кватернионы Алгоритм непрерывного времени для нормализации единичных кватернионов: d dt q q 2q b T q q b / n 0 Если q инициализируется как единичный вектор, то он останется единичным вектором. Однако интегрирование кватернионного вектора q из дифференциального уравнения приведет к числовым ошибкам, которые приведут к отклонению длины q от единицы. В Simulink этого можно избежать, вводя обратную связь: q T qqb nb 2 1 q qq 0 (обычно 100 d dt qq 2q T qq nb 0, если q инициализируется как единичный вектор b 1 q qq q 1 q qq q Изменение координат x 1 qq (x = 0 дает qq 1) 21 x x1 x линеаризация относительно x = 0 дает xx
22 2.2.3 Кватернионы из углов Эйлера См. Шепперд (1978) Алгоритм (кватернионы из углов Эйлера) n 1. При заданных углах Эйлера ,, и. Пусть матрица преобразования R b в соответствии с записью: n R b: R 1 1 R 1 2 R 1 3 R 2 1 R 2 2 R 2 3 R 3 1 R 3 2 R 3 3 e 2. След R bn вычисляется как: R 44 tr R b R 11 R 22 R Пусть 1 i 4 будет индексом, соответствующим: R ii max R 1 1, R 2 2, R 3 3, R Вычислить pi, соответствующий индексу i шага 3 согласно to: pi 1 2 R ii R 4 4 где знак, приписываемый pi, может быть положительным или отрицательным.5. Вычислите остальные три числа пи: p 4 p 1 R 3 2 R 2 3 p 2 p 3 R 3 2 R 2 3 p 4 p 2 R 1 3 R 3 1 p 3 p 1 R 1 3 R 3. 1 p 4 p 3 R 2 1 R 1 2 p 1 p 2 R 2 1 R 1 2, разделив 3 уравнения, содержащие компонент pi с известным значением pi (из шага 4) с обеих сторон. Вычислите параметры Эйлера q, 1, 2, 3 согласно: p 4/2 и jpj / 2 j 1, 2, 3
23 2.2.4 Углы Эйлера из кватернионов Требовать, чтобы матрицы вращения двух кинематических представлений были равны: R bn nb: R bnq nb ,, q, 1, 2, 3 cc sc css ss ccs sc cc sss cs ssc s cs cc R 11 R 12 R 13 R 21 R 22 R 23 R 31 R 32 R 33 Алгоритм: Одно решение: atan2r 32 , R 33 sin 1 R 31 tan 1 RR 31 atan2r 21, R 11; 90 o, где atan2 (y, x) — 4-квадрантный арктангенс действительных частей элементов x и y, удовлетворяющий: atan2y, x 23
24 2.3 Преобразование между ECEF и NED Точка на поверхности Земли или над ней однозначно определяется: Долготой: l (градус) Широтой: (градус) Эллипсоидальной высотой: h (м) NED {n} -кадр h ECEF {e} — Определения осей NED кадра: N — северная ось указывает север E — восточная ось указывает восток D Вниз ось направлена вниз в нормальном направлении к поверхности Земли 24
25 2.3.1 Преобразования долготы и широты Преобразование между ECEF и векторы скорости NED: npb / n R nbb nb vb / n en l, S 2 Два основных вращения: epb / e 1.вращение l вокруг оси z 2. вращение (/ 2) вокруг оси y. R enn en pb / e R en en R nbb nb vb / e cos l sinl 0 cos 2 0 sin 2 R ne en R z, l R y, 2 sinl cos l sin 2 0 cos 2 R ne en coslsin sinl coslcos sinl sin cosl sinlcos cos 0 sin 25
26 2.3.1 Навигация по плоской Земле Для навигации по плоской Земле можно предположить, что касательная плоскость NED зафиксирована на поверхности Земли, то есть l и являются постоянными, если предположить, что рабочий радиус сосуда ограничен: epb / e R enn en pb / e R en en R nbb nb vb / e en l, S 2 en constant R ne en R o constant R ne en coslsin sinl coslcos sinl sin cosl sinlcos cos 0 грех 26
27 2.3.2 Долгота / широта из координат ECEF Измерения спутниковой навигационной системы приведены в рамке ECEF: Бесполезно для оператора. pe b / e x, y, z Представление данных о положении на суше pe b / e x, y, z, таким образом, производится в терминах эллипсоидальных параметров долготы l, широты и высоты h. Преобразование: pe b / ex, y, z en l и высота h 27
28 2.3.2 Долгота / широта из координат ECEF Параметры Комментарии rem Экваториальный радиус эллипсоида (большая полуось) об / мин Радиус полярной оси эллипсоида (малая полуось) e рад / с Угловая скорость Земли e Эксцентриситет эллипсоида pe b / ex, y, z N re 2 re 2 cos 2 rp 2 sin 2 e 1 rpre 2 l atan yexe, в то время как широта и высота h неявно вычисляются с помощью: tan zep 1 e 2 NN hph cos N 1 28
29 2.3.2 Долгота / широта из алгоритма координат ECEF (преобразование x e, y e, z e в l ,, h) Вычислить p x e y e. 2. Вычислить приблизительное значение 0 из: tan 0 zep 1 e Вычислить приблизительное значение N из: N 2 rer 2 e cos 2 0 r 2 p sin Вычислить эллипсоидальную высоту с помощью: hp cos 0 N Вычислить улучшенное значение для широты by: tan zep 1 e 2 N 0 N 0 h 1 6. Проверьте следующий шаг итерации: если 0 30 2.3.3 Координаты ECEF по долготе / широте Справ. Heiskanen (1967) Преобразование en l для заданных высот h в pe b / ex, y, z дается выражением xyz N hcosl N hcossinl rp 2 re 2 N h sin 30 31 2.4 Преобразование между осями BODY и Flow FLOW часто используются для выражения гидродинамических данных. Оси ПОТОКА находятся путем вращения системы осей BODY таким образом, чтобы результирующая ось x была параллельна набегающему потоку.В осях FLOW ось x направлена прямо в относительный поток, в то время как ось z остается в базовой плоскости, но вращается так, чтобы оставаться перпендикулярной оси x. Ось Y завершает правостороннюю систему. ybxb U x flow — x stab zb 31 32 2.4.1 Определения курса, курса и углов бокового скольжения Взаимосвязь между угловыми переменными курсом, курсом и боковым скольжением важна для маневрирования транспортного средства в горизонтальной плоскости (3 степени свободы) .Термины курс и курс используются как синонимы в большей части литературы по наведению, навигации и управлению морскими судами, и это приводит к путанице. Определение (Курсовый угол χ): угол от оси x рамы NED к вектору скорости транспортного средства, положительное вращение вокруг оси z рамы NED согласно соглашению о правых винтах. Определение: направление (рыскание) Угол: угол от оси x NED к оси x BODY, положительное вращение вокруг оси z рамки NED согласно соглашению с правым винтом.Определение: угол бокового скольжения (дрейфа) β: угол от оси x BODY к вектору скорости транспортного средства, положительное вращение вокруг рамы оси z BODY в соответствии с соглашением о правом винте 32 33 2.4.1 Определения Курс, курс и углы бокового скольжения Угол скольжения: Угол бокового скольжения: arcsin v U small v UU u 2 v 2 Примечание: В SNAME (1950) и Lewis (1989) угол бокового скольжения для морских судов определяется в соответствии с: β SNAME = -β Определение бокового скольжения следует соглашению о знаках, используемому авиационным сообществом, например, как у Нельсона (1998) и Стивенса (1992).Это определение более интуитивно понятно с точки зрения руководства, чем SNAME (1950). 33 Обратите внимание, что угол курса равен курсовому углу (= χ), когда скорость качания v = 0, то есть когда нет скольжения. 34 2.4.2 Боковое скольжение и угол атаки ybv stab R y, vbv flow R z, v stab xb U x flow — x stab zbuvw R y, R z, U 0 0 или u U cos cos v U sin w U sin cos U u 2 v 2 cos 0 sin cos sin 0 R y, 0 1 0, R z, R z, sin cos 0 sin 0 cos 35 2.4.2. Боковое скольжение и распространение угла атаки на океанские течения. Для морских судов, подверженных воздействию океанских течений, вводится понятие относительных скоростей. Относительные скорости: uruucvrvvcwrwwc Следовательно, U ru r2 v r2 wr 2 ur U r cos r cos rvr U r sin rwr U r sin r cos rr tan 1 r sin 1 wrurvr U r 35 36 2.4.2 Боковое скольжение и угол Затем можно рассчитать подъемную силу атаки и силы сопротивления как функцию скорости движения и преобразовать обратно в координаты BODY.ybu U cos cos v U sin w U sin cos xb U x flow — Линейное приближение: u U, v U, w U x stab zb BODY to FLOW Оси: u, v, w, p, q, r расход TU TU diag1 , 1 / u, 1 / u, 1,1,1 поток U ,,, p, q, r TUMTU 1 поток TUNTU 1 поток TU 36 IE8 / IE9 / IE10 больше не поддерживается. Пожалуйста, используйте более современный браузер для просмотра нашего сайта. {{{title}}} {{{description}}} Ничего не найдено: «» Logitech Options — это мощное и простое в использовании приложение, которое расширяет возможности ваших мышей, клавиатур и сенсорных панелей Logitech.Настройте свое устройство с помощью параметров и сделайте больше, чем вы думали. Logitech Options чрезвычайно прост в использовании, но при этом обладает удивительными функциями. Ваши устройства отображаются в виде изображений на экране, поэтому их легко найти, переключить и настроить за секунды. В нем сочетаются годы совершенства Logitech в области аппаратного обеспечения и программного обеспечения. Переназначьте любую кнопку мыши для выполнения практически любой задачи.Для продвинутых устройств вы можете настроить колесо прокрутки, скорость курсора и многое другое. 3 . Расширенные функции клавиш позволяют настроить клавиатуру Logitech так, чтобы она велась так, как вам нравится. Загрузить параметры Logitech для повышения производительности работы
Загрузить параметры Logitech для повышения производительности труда Результатов не найдено
Повторите попытку СТАНОВИТЕСЬ БОЛЬШЕ ПРОИЗВОДИТЕЛЬНОСТИ
Настройка кнопок и действий
Оптимизированные жесты для Windows ® и mac
Кинематика и ключ 2-го закона Ньютона
- Ресурс исследования
- Исследовать
- Искусство и гуманитарные науки
- Бизнес
- Инженерная технология
- Иностранный язык
- История
- Математика
- Наука
- Социальная наука
Лучшие подкатегории
- Продвинутая математика
- Алгебра
- Основы математики
- Исчисление
- Геометрия
- Линейная алгебра
- Предалгебра
- Предварительный камень