Физика 9 Перышкин КР-1 В2 . Контрольная с ответами
Контрольная работа № 1 по физике с ответами в 9 классе «Кинематика» (вариант 2) для УМК Перышкин. Ответы адресованы родителям. Цитаты из пособия использованы в учебных целях. Физика 9 Перышкин КР-1 В2 + ОТВЕТЫ.
Физика 9 класс (УМК Перышкин).
Контрольная работа № 1. Вариант 2
КР-1 В2 «Кинематика» (транскрипт):
№ 1. Два тела, брошенные с поверхности земли вертикально вверх, достигли высот 10 м и 20 м и упали на землю. Пути, пройденные этими телами, отличаются на
1) 5 м 2) 20 м 3) 10 м 4) 30 м
№ 2. За 6 минут равномерного движения мотоциклист проехал 3,6 км. Скорость мотоциклиста равна
1) 0,6 м/с 2) 10 м/с 3) 15 м/с 4) 600 м/с
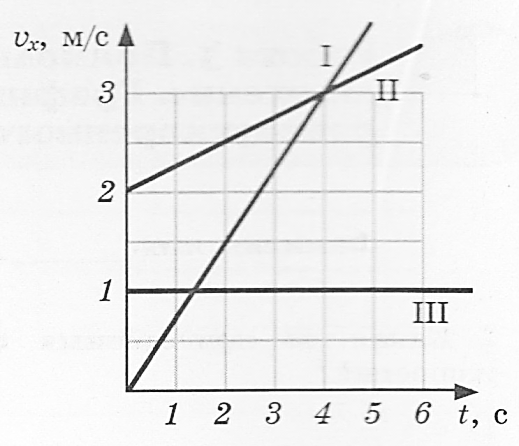
№ 3. На рисунках представлены графики зависимости проекции перемещения от времени для четырёх тел. Какое из тел движется с наибольшей по модулю скоростью?
№ 4. Во время подъёма в гору скорость велосипедиста, двигающегося прямолинейно и равноускоренно, изменилась за 8 с от 18 км/ч до 10,8 км/ч. При этом ускорение велосипедиста было равно
Во время подъёма в гору скорость велосипедиста, двигающегося прямолинейно и равноускоренно, изменилась за 8 с от 18 км/ч до 10,8 км/ч. При этом ускорение велосипедиста было равно
1) –0,25 м/с2 2) 0,25 м/с2 3) –0,9 м/с2 4) 0,9 м/с2
№ 5. Аварийное торможение автомобиля происходило в течение 4 с. Определите, каким был тормозной путь, если начальная скорость автомобиля 90 км/ч.
1) 22,5 м 2) 45 м 3) 50 м 4) 360 м
№ 6. Пловец плывёт по течению реки. Определите скорость пловца относительно берега, если скорость пловца относительно воды 0,4 м/с, а скорость течения реки 0,3 м/с.
1) 0,5 м/с 2) 0,1 м/с 3) 0,5 м/с 4) 0,7 м/с
№ 7. Установите соответствие между физическими величинами и их единицами измерения в СИ.
К каждой позиции первого столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
№ 8. Поезд начинает равноускоренное движение из состояния покоя и проходит за четвёртую секунду 7 м. Какой путь пройдёт тело за первые 10 с?
№ 9. Катер, переправляясь через реку шириной 800 м, двигался перпендикулярно течению реки со скоростью 4 м/с в системе отсчёта, связанной с водой. На сколько будет снесён катер течением, если скорость течения реки 1,5 м/с?
Физика 9 Перышкин КР-1 В2 ОТВЕТЫ:
№ 1). 2.
№ 2). 2.
№ 3). 3.
№ 4). 1.
№ 5). 3.
№ 6). 4.
№ 7). 354.
№ 8). 100 м.
№ 9). 300 м.
Другие варианты: КР-1. Вариант 1 КР-1. Вариант 3 КР-1. Вариант 4
Вернуться с Списку контрольных работ по физике в 9 классе (УМК Перышкин)
Вы смотрели: Контрольная работа № 1 по физике с ответами в 9 классе «Кинематика» (вариант 2). Цитаты из пособия для учащихся «Контрольные и самостоятельные работы по физике 9 класс к учебнику А. В. Перышкина Физика 9 класс ФГОС» (авт. О.И. Громцева, изд-во «Экзамен») использованы в учебных целях. Физика 9 Перышкин КР-1 В2 + ОТВЕТЫ.
В. Перышкина Физика 9 класс ФГОС» (авт. О.И. Громцева, изд-во «Экзамен») использованы в учебных целях. Физика 9 Перышкин КР-1 В2 + ОТВЕТЫ.
Физика 9 Перышкин КР-1 В3 . Контрольная с ответами
Контрольная работа № 1 по физике с ответами в 9 классе «Кинематика» (вариант 3) для УМК Перышкин. Ответы адресованы родителям. Цитаты из пособия использованы в учебных целях. Физика 9 Перышкин КР-1 В3 + ОТВЕТЫ.
Физика 9 класс (УМК Перышкин).
Контрольная работа № 1. Вариант 3
КР-1 В3 «Кинематика» (транскрипт):
№ 1. Решаются две задачи:
А: рассчитывается маневр стыковки двух космических кораблей;
Б: рассчитываются периоды обращения космических кораблей вокруг Земли.
В каком случае космические корабли можно рассматривать как материальные точки?
№ 1) Только А 2) Только Б 3) И А, и Б 4) Ни А, ни Б
№ 2. Средняя скорость поезда метрополитена 40 м/с. Время движения между двумя станциями 4 минуты. Определите, на каком расстоянии находятся эти станции.
Время движения между двумя станциями 4 минуты. Определите, на каком расстоянии находятся эти станции.
1) 160 м 2) 1000 м 3) 1600 м 4) 9600 м
№ 3. На рисунках представлены графики зависимости проекции скорости от времени для четырёх тел, движущихся вдоль оси ОХ. Какое из тел движется с постоянной скоростью?
№ 4. Ускорение велосипедиста на одном из спусков трассы равно 1,2 м/с2. На этом спуске его скорость увеличилась на 18 м/с. Велосипедист спускается с горки за
1) 0,07 с 2) 7,5 с 3) 15 с 4) 21,6 с
№ 5. Какое расстояние пройдёт автомобиль до полной остановки, если шофёр резко тормозит при скорости 72 км/ч, а от начала торможения до остановки проходит 6 с?
1) 36 м 2) 60 м 3) 216 м 4) 432 м
№ 6. Катер движется по течению реки со скоростью 11 м/с относительно берега, а в стоячей воде – со скоростью 8 м/с. Чему равна скорость течения реки?
1) 1 м/с 2) 1,5 м/с 3) 3 м/с 4) 13 м/с
№ 7. Установите соответствие между физическими величинами и формулами, по которым эти величины определяются.
Установите соответствие между физическими величинами и формулами, по которым эти величины определяются.
К каждой позиции первого столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
№ 8. Скорость материальной точки на пути 60 м увеличилась в 5 раз за 10 с. Определить ускорение, считая его постоянным.
№ 9. Товарный поезд едет со скоростью 36 км/ч. Спустя 30 минут с той же станции по тому же направлению выходит экспресс со скоростью 144 км/ч. На каком расстоянии от станции экспресс догонит товарный поезд?
Физика 9 Перышкин КР-1 В3 ОТВЕТЫ:
№ 1). 2.
№ 2). 4.
№ 3). 1.
№ 4). 3.
№ 5). 2.
№ 6). 3.
№ 7). 431.
№ 8). 0,8 м/с2.
№ 9). 24 км.
Другие варианты: КР-1. Вариант 1 КР-1. Вариант 2 КР-1. Вариант 4
Вернуться с Списку контрольных работ по физике в 9 классе (УМК Перышкин)
Вы смотрели: Контрольная работа № 1 по физике с ответами в 9 классе «Кинематика».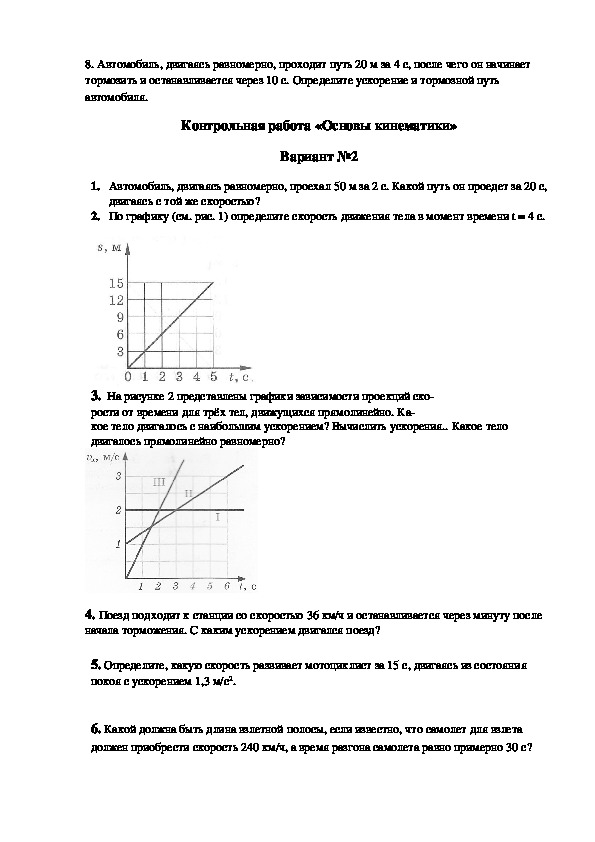 Цитаты из пособия для учащихся «Контрольные и самостоятельные работы по физике 9 класс к учебнику А.В. Перышкина Физика 9 класс ФГОС» (авт. О.И. Громцева, изд-во «Экзамен») использованы в учебных целях. Физика 9 Перышкин КР-1 В3 + ОТВЕТЫ.
Цитаты из пособия для учащихся «Контрольные и самостоятельные работы по физике 9 класс к учебнику А.В. Перышкина Физика 9 класс ФГОС» (авт. О.И. Громцева, изд-во «Экзамен») использованы в учебных целях. Физика 9 Перышкин КР-1 В3 + ОТВЕТЫ.
КОНТРОЛЬНАЯ РАБОТА для 9 класса по теме «Законы механики (кинематика)»
Физика 9 класс
КОНТРОЛЬНАЯ РАБОТА № 1 по теме
«Законы механики (кинематика)»
В – 1
1. Какие из перечисленных величин являются скалярными?
А. Путь; Б. Перемещение; В. Скорость; Г. Ускорение.
2. Какое из уравнений описывает равноускоренное движение?
А.
Б. В. Г.3. Ускорение автомобиля, начавшего движение, равно 0,5 м/с2. Какой путь пройдет автомобиль за промежуток времени 4 секунды, двигаясь с этим ускорением?
4.С какой скоростью двигался поезд на перегоне длиной 50 км, если он прошел его за 37 мин?
5. Шишка, висевшая на кедре, оторвалась от ветки и за 2 с достигла земли. На какой высоте висела шишка?
Шишка, висевшая на кедре, оторвалась от ветки и за 2 с достигла земли. На какой высоте висела шишка?
6.Определите ускорение конца минутной стрелки часов на Спасской башне Кремля, если он находится на расстоянии 4,5 м от центра вращения.
_________________________________________________________________
Физика 9 класс
КОНТРОЛЬНАЯ РАБОТА № 1 по теме
«Законы механики (кинематика)»
В – 2
1. Какое из уравнений описывает равномерное движение?
А.
Б. В. Г.2. Что называется перемещением?
А. Путь, который проходит тело;
Б. Вектор, соединяющий начальную и конечную точки траектории движения тела за данный промежуток времени;
В. Длина траектории движения;
Г. Путь, который проходит тело за единицу времени.
3. Поезд отходит от станции с ускорением 1 м/с2. Определите промежуток времени, за который поезд пройдет путь 8∙102 м.
Определите промежуток времени, за который поезд пройдет путь 8∙102 м.
4.Человек идет по дороге со скоростью 4 км/ч. За какое время он пройдет 500 м?
5. Камень падал на дно ущелья в течение 7 с. Какова глубина ущелья?
6.Частота обращения карусели 0,05 с–1. Человек, вращающийся на карусели, находится на расстоянии 4 м от оси вращения. Определите центростремительное ускорение человека.
Физика 9 класс
КОНТРОЛЬНАЯ РАБОТА № 1 по теме
«Законы механики (кинематика)»
В – 3
1.Какие из перечисленных величин являются векторными?
А. Скорость; Б. Координата; В. Пройденный путь; Г. Время.
2. В каком из следующих случаев движение тела можно рассматривать как движение материальной точки?
А. Вращение детали, обрабатываемой на токарном станке;
Б. Движение поезда по мосту;
В. Движение фигуриста на льду;
Движение фигуриста на льду;
Г. Полет самолета, совершающего рейс Минск – Москва.
3. Поезд, движущийся после начала торможения с ускорением 0,4 м/с2, через 25 секунд остановился. Найдите скорость поезда в начале торможения.
4. Листья, поднятые ветром , за 10 мин, двигаясь равномерно , переместились на расстояние 14000 м. Какова скорость урагана?
5. Мяч брошен вверх с нач. скоростью 30 м/с. Сколько времени он летел до верхней точки?
6.Чему равна линейная скорость точки обода колеса, если радиус колеса 30 см и один оборот она совершает за 2 с?
________________________________________________________________
Физика 9 класс
КОНТРОЛЬНАЯ РАБОТА № 1 по теме
«Законы механики (кинематика)»
В – 4
1. Основная задача кинематики …
А. … установить причины движения тел;
Б. … определить положение тел в пространстве в любой момент времени.
… определить положение тел в пространстве в любой момент времени.
В … определить скорость движения.
2. Какой из представленных графиков выражает зависимость ускорения материальной точки от времени при равноускоренном движении?
3. Поезд двигался со скоростью 72 км/ч. Найдите промежуток времени ∆t торможения, если известно, что тормозной путь равен 800 м.
4. Космический корабль « Восток-3» за 95 ч нахождения в космическом пространстве облетел вокруг Земли свыше 2600000 км. Какова средняя скорость его движения?
5. Высота классной комнаты 5 м Сколько времени будет падать шарик от потолка до пола ?
6. Точка обода колеса велосипеда совершает один оборот за 2 с. Радиус колеса 35 см. Чему равно центростремительное ускорение точки обода колеса?
Контрольная работа №1 (9 класс) «Кинематика прямолинейного движения» в 1 Какие из перечисленных величин являются скалярными?
скачать Контрольная работа № 1 (9 класс)«Кинематика прямолинейного движения»
В – 1
1. Какие из перечисленных величин являются скалярными?
Какие из перечисленных величин являются скалярными?
А. Путь; Б. Перемещение; В. Скорость; Г. Ускорение.
2. Какое из уравнений описывает равноускоренное движение?
А. Б. В. Г.
3. Ускорение автомобиля, начавшего движение, равно 0,5 м/с2. Какой путь пройдет автомобиль за промежуток времени 4 секунды, двигаясь с этим ускорением?
4. Движение тела задано уравнением (м). Какой будет его скорость через промежуток времени 5 с после начала отсчета времени?
5. По заданному графику зависимости скорости от времени напишите уравнение движения. Начальная координата тела равна нулю.
6. Вагон движется со скоростью 72 км/ч. Дождевые капли в безветренную погоду оставляют след на его окне под углом 60о к вертикали. Найдите скорость падения капель.
7. Автомобиль доставил груз из пункта А в пункт В, перемещаясь в среднем со скоростью 40 км/ч. Возвращаясь обратно, автомобиль двигался со средней скоростью 60 км/ч.
 Чему равна средняя скорость его движения на всем пути?
Чему равна средняя скорость его движения на всем пути? 8. Используя график скорости , постройте графики перемещения и ускорения и объясните характер движения тела на различных участках .
9. Тело, двигаясь равноускоренно, в течение пятой секунды от начала движения прошло 45м. С каким ускорением двигалось тело? Какова его скорость в конце пятой секунды? Какой путь прошло тело за первую секунду?
«Кинематика прямолинейного движения»
В – 2
1. Какое из уравнений описывает равномерное движение?
А. Б. В. Г.
2. Что называется перемещением?
А. Путь, который проходит тело;
Б. Вектор, соединяющий начальную и конечную точки траектории движения тела за данный промежуток времени;
В. Длина траектории движения;
Г. Путь, который проходит тело за единицу времени.
3. Поезд отходит от станции с ускорением 1 м/с2. Определите промежуток времени, за который поезд пройдет путь 8∙102 м.
4. Движение тела задано уравнением (м). Определите путь, пройденный за промежуток времени 10 с.
5. По графику зависимости модуля скорости от времени определите ускорение и запишите уравнение движения. Начальная координата тела равна 6 м.
6. Два поезда идут навстречу друг другу со скоростями 36 км/ч и 54 км/ч. Пассажир, находящийся в поезде, замечает, что второй поезд проходит мимо него в течение 6 с. Найдите длину второго поезда.
7. Используя график зависимости проекции скорости от времени, постройте графики зависимости ускорения, и пути от времени.
8. Поезд движется на подъеме со скоростью 10 м/с и затем на спуске со скоростью 25 м/с. Какова средняя скорость поезда на всем пути, если длина спуска в 2 раза больше длины подъема?
9. Реактивный самолет летит со скоростью 720 км/ч. С некоторого момента самолет движется с ускорением в течение 10 с и в последнюю секунду проходит путь 295 м.
 Определите ускорение и конечную скорость.
Определите ускорение и конечную скорость.Контрольная работа № 1 (9 класс)
«Кинематика прямолинейного движения»
1.Какие из перечисленных величин являются векторными?
А. Скорость; Б. Координата; В. Пройденный путь; Г. Время.
2. В каком из следующих случаев движение тела можно рассматривать как движение материальной точки?
А. Вращение детали, обрабатываемой на токарном станке;
Б. Движение поезда по мосту;
В. Движение фигуриста на льду;
Г. Полет самолета, совершающего рейс Минск – Москва.
3. Поезд, движущийся после начала торможения с ускорением 0,4 м/с2, через 25 секунд остановился. Найдите скорость поезда в начале торможения.
4. Движение тела задано уравнением (м). Какой будет его скорость через 2 с после начала отсчета времени?
6. По прямолинейной дороге в одном направлении едут велосипедист со скоростью 36 км/ч и мотоциклист со скоростью 72 км/ч. В начальный момент времени расстояние между ними было 250 м. Через какой промежуток времени мотоциклист догонит велосипедиста?
7. Первую половину пути велосипедист ехал со скоростью 24 км/ч, а вторую – со скоростью . Чему равна эта скорость, если средняя скорость равна 12 км/ч.
8. На рисунке представлен график зависимости проекции скорости на ось OX от времени. Начертите соответствующие этому графику зависимости ускорения и перемещения от времени.
9. Тело при равноускоренном движении проходит за первые 4 с путь, равный 24 м. Определить модуль начальной скорости тела, если за следующие 4 с тело проходит расстояние 64 м.
Контрольная работа № 1 (9 класс)
«Кинематика прямолинейного движения»
В – 4
1. Основная задача кинематики …
А. … установить причины движения тел;
Б. … изучить условия равновесия тел;
В. … определить положение тел в пространстве в любой момент времени.
… определить положение тел в пространстве в любой момент времени.
Г. … определить скорость движения.
3. Поезд двигался со скоростью 72 км/ч. Найдите промежуток времени ∆t торможения, если известно, что тормозной путь равен 800 м.
4. Движение тела задано уравнением (м). Какой будет его скорость через 2 с после начала отсчета времени?
5. По заданному графику зависимости скорости от времени напишите уравнение движения. Начальная координата тела равна 3 м.
6. Катер, переправляясь через реку, движется перпендикулярно течению реки со скоростью 4 м/с в системе отсчета, связанной с водой. На сколько метров будет снесен катер течением, если ширина реки 800 м, а скорость течения 1 м/с?
7. Африканский страус имеет максимальную скорость 80 км/ч и с этой скоростью он пробегает ¾ пути, а оставшуюся часть пути он бежит со скоростью 40 км/ч.
 Какова средняя скорость страуса?
Какова средняя скорость страуса? 8. На рисунке представлен график зависимости проекции скорости на ось OX от времени. Начертите соответствующие этому графику зависимости ускорения и перемещения от времени.
9. За пятую секунду равнозамедленного движения точка проходит 5 см и останавливается. Какой путь проходит точка за третью секунду этого движения?
Кинематические связи. 9 класс
Давайте начнем погружение в разнообразную тему “Кинематические связи” с не очень сложных задач, предложенных в этой статье. Должно последовать продолжение, где я предложу еще целую большую подборку задач на эту тему.
Задача 1. Сила сопротивления воздуха, действующая на велосипедиста, пропорциональна квадрату скорости велосипедиста . На горизонтальной дороге наибольшая скорость велосипедиста составляет примерно 20 м/с. Оцените коэффициент пропорциональности , если масса велосипедиста вместе с велосипедом 70 кг, а коэффициент трения между колесами и дорогой 0,4.
Решение.
При равномерном движении по горизонтальной поверхности на велосипедиста действуют две силы: сила трения покоя и сила сопротивления воздуха.
Так как скорость велосипедиста максимальна, то сила трения достигает своего максимального значения: . Тогда
откуда
кг/м.
Ответ: 0,7 кг/м.
Задача 2. Плывущая по реке с постоянной скоростью баржа тянет под водой на тросах два шарообразных контейнера одинакового размера, но разного веса. Угол отклонения первого троса по вертикали , а второго . Когда скорость баржи уменьшилась, угол отклонения первого троса составил . Каков стал угол отклонения от вертикали второго троса? Ответ дать в градусах. Округлить до целых.
К задаче 2
Решение.
Запишем условие равенства сил, действующих на контейнер. Так мы сможем получить выражение для величины силы сопротивления. Сила сопротивления направлена горизонтально, а сила тяжести – вертикально, поэтому они образуют прямоугольный треугольник и связаны соотношением:
.
Сила сопротивления для контейнеров одинакова, ведь форма у них одна и та же и движение их осуществляется с одной и той же скоростью. Поэтому
.
Если баржа изменит скорость, то изменятся величины углов, они станут меньше:
.
Таким образом .
Подставим условия .
Поэтому искомый угол равен
Ответ: 18.
Задача 3. Найдите ускорение груза массой кг после перерезания верхней левой нити. Нити и блок считать идеальными, кг. м/c. Ответ дать в м/c.
К задаче 3
Решение.
Выберем положительное направление оси вертикально вниз и запишем второй закон Ньютона для обоих тел:
.
Нити и блок невесомы, поэтому не вошли в уравнения пока никак.
Для нахождения кинематической связи между и применим метод виртуальных перемещений. Длина нити может быть записана , где — координата груза массой , — координата центра блока, — его радиус. Длина нити при движении грузов не изменяется – нить нерастяжима. Тогда для перемещений грузов получим соотношение , откуда , . Решая систему уравнений, находим
Тогда для перемещений грузов получим соотношение , откуда , . Решая систему уравнений, находим
Ответ: 16 м/c.
Задача 4. Четыре одинаковых брусочка, связанные нитями, движутся друг за другом поступательно с постоянным ускорением по гладкой горизонтальной поверхности под действием силы, приложенной к первому бруску. Найдите отношение сил натяжения первой и последней нити. Нити невесомы и идеальны.
К задаче 4
Решение.
Запишем 2 закон Ньютона в проекции на горизонтальную ось для трех последних брусочков (они будут у нас пока одним единым телом) , – сила натяжения первой нити; и для последнего бруска . Искомое отношение сил натяжения нитей – 3.
Ответ: 3.
Задача 5. Найдите ускорение призмы массой кг, находящейся на кубе массой кг. Угол . Трением пренебречь. м/c. Ответ дать в м/c.
К задаче 5
Решение.
Запишем второй закон Ньютона для каждого тела (в проекции на направление, совпадающее с соответствующим ускорением). Тогда для призмы получим:
Тогда для призмы получим:
,
а для куба .
По третьему закону Ньютона .
У нас есть два уравнения, и три неизвестных. Значит, необходимо еще одно уравнение. Куб и призма соприкасаются, скольжения при их движении нет, поэтому проекции ускорений на ось, перпендикулярную плоскости контакта, должны быть равны – это так называемое “правило палочки”, – откуда:
Решая систему, находим
Ответ: 5 м/c
Дидактические материалы 9 класс
Тематическое оценивание знаний, умений и навыков учащихся 9 класса осуществляется различными способами:
- письменная контрольная работа;
- устный фронтальный итоговый зачет;
- письменный тематический зачет;
- тестирование.
Шаблон в контроле знаний недопустим. Необходимо проверить не только запоминание, но и степень осмысления учебного материала.
В этом отношении тестирование имеет некоторые преимущества перед традиционными способами контроля учебных достижений учащихся:
- оценка учеников не зависит от субъективности проверяющего;
- база тестовых заданий является открытой и доступной для всех (тесты напечатаны в виде сборников), благодаря чему можно заранее подготовиться к тестированию;
- использование элементов тестовых заданий непосредственно на уроках повышает эффективность учебного процесса, обеспечивает оперативную обратную связь между учителем и учащимися;
- результаты тестирования дают возможность глубже проанализировать уровень знаний учащихся, что позволяет выработать более конкретные рекомендации по коррекции содержания учебного процесса.
Введение тестирования целесообразно начинать именно с тематического оценивания, чтобы тестирование стало обычным средством обучения и контроля. Это позволит ученикам подготовиться к будущему единому государственному экзамену (ЕГЭ), который призван объединить итоговую аттестацию учащихся в школе и отбор абитуриентов для поступления в ВУЗы.
В основу тестов могут быть положены принципы, благодаря которым они являются не только контролирующими, но и обучающими:
- ситуационность — условие теста является кратким описанием определенной ситуации, одной из ключевых для данной темы;
- комплектность — вариантами ответов является утверждение относительно данной ситуации, которые требу ют от ученика рассмотрения данной ситуации с разных сторон, поэтому правильных утверждений может быть несколько , и ученик должен внимательно продумать каждое утверждение, а не искать только одно правильное;
- дифференциация — ученик имеет возможность выбора заданий: даже для того, чтобы получить высшую оценку, ему не надо выполнять все задания.
При выполнении тестов каждый учащийся выбирает только те 6 заданий из 12-ти, уровень которых, по его мнению, отвечает уровню учебных достижений.
Задания начального уровня (.№ 1 — 3) и задания среднего уровня (.№ 4-6) оцениваются — в 1 балл каждое, задания достаточного уровня сложности (.№ 7-9) — в 2 балла каждое, задания высокого уровня сложности (№ 10-12) — в 3 балла каждое.
Для выставления оценок учитель может воспользоваться следующей таблицей:
| баллы | 1 — 2 | 3 — 4 | 5 — 8 | 9 — 12 | более 12 |
| оценка | 1 | 2 | 3 | 4 | 5 |
В зависимости от уровня класса учитель сам может откорректировать эту таблицу.
Для проведения тестирования можно воспользоваться учебным пособием «Физика-9. Тесты для тематического контроля» (Л. Э. Генденштейн, Л. А. Кирик, М: «Илекса», 2003).
В этой книге тесты приведены в 4-х одинаковых по сложности вариантах.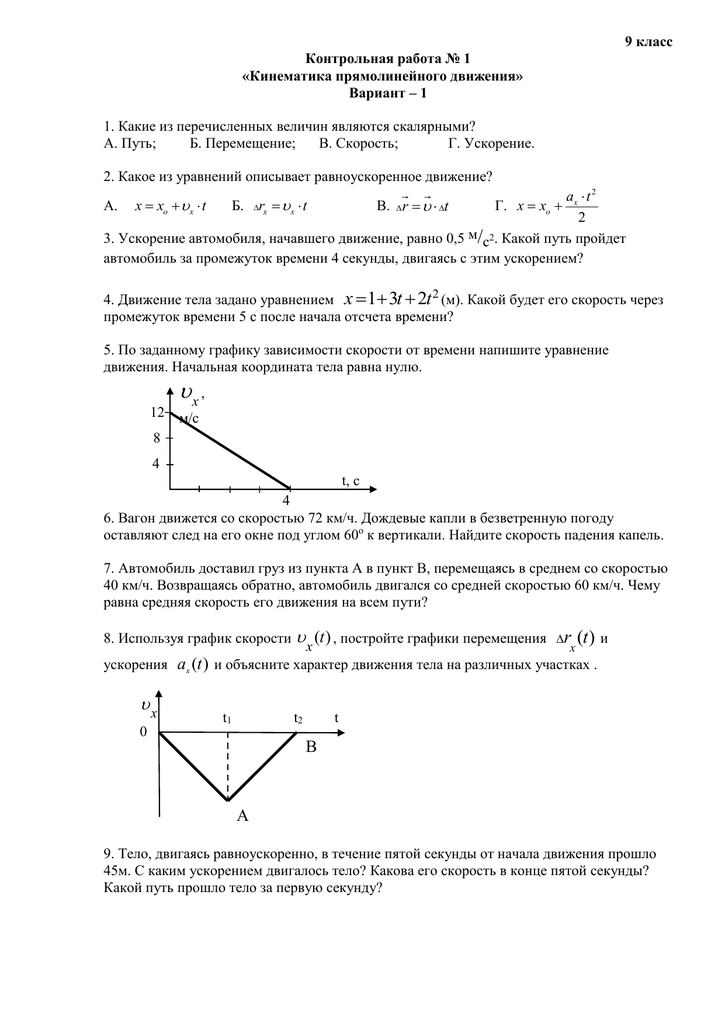 Предполагаемое время на выполнение одного варианта — один урок.Для непосредственного контроля можно воспользоваться компьютерной программой «Генератор тестов». Эта программа позволяет создавать необходимое количество новых вариантов тестовых заданий (например, по количеству учащихся в классе).
Предполагаемое время на выполнение одного варианта — один урок.Для непосредственного контроля можно воспользоваться компьютерной программой «Генератор тестов». Эта программа позволяет создавать необходимое количество новых вариантов тестовых заданий (например, по количеству учащихся в классе).
Итоговая работа по теме «Кинематика», 9 класс
Домашняя контрольная работа по теме «Законы Ньютона», 9 класс
Контрольная работа по теме «Законы взаимодействия тел», 9 класс
Контрольная работа по теме «Электромагнитное поле», 9 класс
Контрольная работа по теме «Электромагнитные волны», 9 класс
Контрольная работа по теме «Механические колебания и волны», 9 класс
Самостоятельная работа по теме «Механические колебания и волны», 9 класс
Контрольная работа по теме «Строение атома и атомного ядра», 9 класс
Самостоятельная работа по теме «Строение атома и атомного ядра», 9 класс
Тематическое оценивание по теме «Строение атома и атомного ядра», 9 класс
Тематическое оценивание по теме «Электромагнитное поле», 9 класс
9: Обратная кинематика промышленных роботов
9: Обратная кинематика промышленных роботов
Загрузить заметки
ТЕМА 1: Обратная кинематика
В предыдущем обсуждении мы подошли к моменту, когда мы могли определить, где был расположен конечный эффектор робота, если бы мы знали углы каждой оси. К сожалению, это не то, что обычно требуется промышленному роботу. Обычно нам нужно знать, какие углы приведут нас к известной точке пространства.Эта проблема называется обратной кинематикой. Этот процесс очень быстро усложняется, когда конфигурация имеет более двух соединений, поэтому мы будем придерживаться двух!
К сожалению, это не то, что обычно требуется промышленному роботу. Обычно нам нужно знать, какие углы приведут нас к известной точке пространства.Эта проблема называется обратной кинематикой. Этот процесс очень быстро усложняется, когда конфигурация имеет более двух соединений, поэтому мы будем придерживаться двух!
В отделении мы ранее делали роботов-шприцев, как показано ниже. Шприцы соединяются с соответствующими шприцами через шланги, а давление воздуха — это метод ручного управления для небольшого робота. Передняя кинематика была выполнена на основе предыдущего обсуждения и приведена ниже. d 1 и 2 варьируются от робота к роботу и являются измеренными значениями.
Для выполнения обратной кинематики и уравнения создается для каждого x, y и z, когда предполагаемая точка интереса на конечном эффекторе равна [x y z] = [0 0 0]. До этого момента процесс представлял собой процесс прямой кинематики, но следующим шагом является то, что характеризует обратную кинематику. После того, как x, y и z решены, мы должны повернуть его и решить для углов соединения, 1 и Ѳ 2.
После того, как x, y и z решены, мы должны повернуть его и решить для углов соединения, 1 и Ѳ 2.
Теперь, когда у нас есть решение обратной кинематики, мы можем решить для углов сочленения, если задана требуемая точка в пространстве относительно базовых координат.Например, если в приведенном выше примере роботу необходимо было добраться до точки в пространстве [x, y, z] = [136,151, 36,482, 151,303], и мы измерили d 1 как 100 мм и a 2 должно быть 120 мм, тогда мы могли бы решить для углов сочленения, вставив и решив для x, y и z.
Вставьте значения и убедитесь, что вы получили Ѳ 1 = 25,3 и Ѳ 2 = 19,6.
ДОМАШНЕЕ ЗАДАНИЕ: Покажите приведенную выше процедуру нахождения T и покажите процесс, необходимый для получения уравнений для обоих углов.Укажите углы, необходимые для перемещения этого робота в точку [x, y, z] = [70,42, 59,09, 177,13].
Нравится:
Нравится Загрузка . ..
..
8: Кинематика промышленных роботов
Загрузить заметки
ТЕМА 1: Робототехнические системы
Если рассматривать только механические аспекты роботизированных систем, они состоят из трех частей: звенья и шарниры составляют то, что считается манипулятором, а рабочий орган или инструмент на конце руки — это инструмент, прикрепленный к концу манипулятора, который делает работу.
Соединение — это точка соединения двух звеньев, которые могут либо вращаться вокруг оси (поворотное соединение — R), либо проходить вдоль оси (призматический — P). Сустав похож на локоть. Ссылка — это фиксированный объект, который не перемещается относительно самого себя, но может перемещаться относительно других ссылок в роботе через соединение через соединение. Ссылка — это как ваша плечевая мышца (плечо). Он не движется относительно себя, но движется относительно вашего предплечья через локоть.
Концевой эффектор — это инструмент, закрепленный на конце руки, например двухпальцевый захват или сварочный аппарат. Это объект, который робот используется для позиционирования таким образом, чтобы он мог надлежащим образом выполнить требуемую работу.
Это объект, который робот используется для позиционирования таким образом, чтобы он мог надлежащим образом выполнить требуемую работу.
Так как соединения R и P можно комбинировать разными способами, мы классифицируем их на основе этих комбинаций. Ниже приведены некоторые из распространенных конфигураций.
1. Робот Selective Compliant Articulated Robot for Assembly (SCARA) — это манипулятор RRP, состоящий из двух вращающихся шарниров и одного призматического шарнира. Иногда манипулятор этого типа имеет четвертую ось вращения или шарнир, прикрепленный к концу призматического шарнира.Они часто используются для высокоскоростных погрузочно-разгрузочных работ. Ознакомьтесь с примерами ниже.
Обратите внимание на четвертую ось, добавленную к концу призматического шарнира в следующем примере.
2. Шарнирно-сочлененная рука представляет собой конфигурацию RRR, состоящую из трех вращающихся шарниров, и является наиболее распространенным типом промышленных роботов, используемых для большого количества различных видов деятельности. Это относится к первым трем осям робота. В большинстве случаев есть еще три оси, составляющие запястье робота, всего 6 осей или суставов.Однако в некоторых случаях существует только одна или две дополнительные оси, например, в роботе-палетоукладчике KUKA KR40A. 6-осевая версия — это робот, который мы используем в лаборатории. Посмотрите на пример этой конфигурации ниже.
3. Декартов робот или портальный робот представляет собой конфигурацию PPP, а также обычный тип роботов, обычно используемых в обслуживании машин. Этот робот состоит из большой рамы, обычно расположенной над или вокруг большой машины, такой как термопластавтомат. Посмотрите пример этой конфигурации ниже.
4. Другая довольно распространенная конфигурация роботов называется Delta Robot. Это сложно описать, поэтому посмотрите видео ниже.
5. На рынке существует множество других конфигураций или комбинаций конфигураций. Распространенной комбинацией является комбинация шарнирно-сочлененной руки на одноосном портале, например, на KUKA jet.
ТЕМА 2: Системы координат
В роботизированном манипуляторе для каждого сустава может быть назначена декартова система координат, с помощью которой можно полностью описать каждое движение.Существует очень специфический метод, разработанный в 1950-х годах для присвоения этих декартовых систем координат роботу-манипулятору, который называется методом Денавита-Хартенберга или методом D-H. Метод D-H описан ниже.
Начните с оси 0 у основания робота и двигайтесь к рабочему органу. Каждая ось будет иметь оси x, y и z, обозначенные x n , y n и z n , где n — номер оси, начинающийся с 0.
1. Начните с выбора оси z в направлении оси соединения.То есть, если шарнирное соединение, ось z выходит за пределы оси вращения или если шарнир призматический, ось z проходит вдоль оси движения.
2. Ось x выбрана перпендикулярной как текущей оси z, так и оси z предыдущего соединения.
3. Ось Y выбрана так, чтобы система координат соответствовала правилу правой руки, изображенному ниже.
После определения осей набор «параметров DH» должен быть идентифицирован следующим образом.
1.d — «расстояние между суставами» и расстояние между текущей осью x и осью x предыдущего сустава по оси z предыдущего сустава.
2. — это «угол сочленения» и представляет собой угол от предыдущей оси x до текущей оси x, вращающейся вокруг предыдущей оси z. Если шарнир вращается, это значение, вероятно, является переменной.
3. a — «длина связи» и представляет собой расстояние от предыдущей оси z до текущей оси z вдоль текущей оси x.
4.представляет собой «поворот связи» и представляет собой угол от предыдущей оси z к текущей оси z, вращающейся вокруг текущей оси x.
Вот пример системы координат, применяемой к роботизированному манипулятору.
ТЕМА 3: Прямая кинематика
После того, как полный набор параметров DH получен из выбранных систем координат, необходимо разработать серию матриц преобразования. Эти матрицы служат преобразователем декартовых координат.То есть, если точка в пространстве известна в x, y и z относительно базовой системы координат, расположенной в основании робота, первая матрица преобразования может использоваться для связи этой же точки с декартовой системой координат, расположенной у первого стыка в роботе. Эти матрицы преобразования имеют форму, приведенную ниже.
В приведенном выше уравнении не путайте альфа с a. В крайнем правом столбце используется значение, а в других столбцах используется значение альфа.
Где n начинается с 1 и заканчивается общим количеством звеньев в манипуляторе.Как только все n матриц получены, их необходимо перемножить, чтобы получить полную матрицу преобразования. Для простоты функции синуса и косинуса часто представлены только их первыми буквами s и c соответственно.
Для праймера или обзора матричного умножения перейдите сюда.
Для примеров выбора системы координат DH и сбора параметров перейдите сюда.
После завершения матрицы преобразования ее можно использовать для связи точки в декартовом пространстве по отношению к базовой координате с точкой в декартовом пространстве по отношению к конечному результату.
ДОМАШНИЕ РАБОТЫ:
Разработайте полную матрицу преобразования для манипулятора, показанного ниже. Укажите значения x, y и z относительно базовой системы координат центра последнего звена, на котором будет установлен рабочий орган, если Ѳ 1 = 40 ° и Ѳ 2 = 30 °. Я начал с выбора систем координат для каждого сустава. Сдавай свою работу или брось в мой почтовый ящик. Загрузите заметки в верхней части экрана, чтобы лучше представить изображение ниже.
ПОДСКАЗКИ:
1. Считайте, что этой точкой является x, y, z = 0,0,0 в системе координат последнего звена.
2. Считайте, что соединение 0 находится под нулевым градусом на рисунке, а соединение 1 находится под углом примерно -70 градусов; то есть ноль градусов будет повернут от вас примерно на 70 градусов, так что звено 1 и звено 2 будут параллельны.
3. Выберите ось z базовой системы координат, совпадающую с осью вращения шарнира 0, и выберите ось x, параллельную звену 1.
Нравится:
Нравится Загрузка …
Кинематика и динамика — Скачать PDF бесплатно
2.5 Физическая анимация
2.5 Физическая анимация 320491: Расширенная графика — Глава 2 74 Физическая анимация Морфинг позволил нам анимировать между двумя известными состояниями. Обычно известно только одно состояние объекта.
Дополнительная информацияКомпьютеры в кинопроизводстве
Компьютеры в кинопроизводстве Белоснежка (1937) Компьютеры в кинопроизводстве Слайд 1 Белоснежка — безумие Диснея Мораль: первоначальный бюджет 250 000 долларов Стоимость производства 1 488 422 кадра 127 000 Время производства 3.5 лет
Дополнительная информацияИнтерактивная компьютерная графика
Лекция по интерактивной компьютерной графике 18 Кинематика и анимация Лекция по интерактивной графике 18: Слайд 1 Анимация 3D-моделей В первые дни физические модели изменялись кадр за кадром для создания
Дополнительная информацияОсновы компьютерной анимации
Основы компьютерной анимации Принципы традиционной анимации Как добиться максимального воздействия стр. 1 Как добиться максимального воздействия Ранние аниматоры работали с нуля, чтобы анализировать и улучшать тишину
Дополнительная информацияУСКОРЕНИЕ СИЛЫ ТЯЖЕСТИ
ЭКСПЕРИМЕНТ 1 ФИЗИКА 107 УСКОРЕНИЕ ОТ ГРАВИТАЦИИ Навыки, которые вы изучите или примените на практике: Расчет скорости и ускорения на основе экспериментальных измерений x vs t (положения искр). Найдите средние скорости
. Дополнительная информацияГеометрические ограничения
Моделирование в компьютерной графике Геометрические ограничения Маттиас Тешнер Факультет компьютерных наук Фрайбургский университет Схема введения метода штрафа Множители Лагранжа локальные ограничения Университет
Дополнительная информацияEDUH 1017 — СПОРТИВНАЯ МЕХАНИКА
4277 (a) Семестр 2, 2011 Стр. 1 из 9 СИДНЕЙСКИЙ УНИВЕРСИТЕТ EDUH 1017 — СПОРТИВНАЯ МЕХАНИКА НОЯБРЬ 2011 Отведенное время: ДВА ЧАСА Всего оценок: 90 ЗНАЧЕНИЙ ИНСТРУКЦИИ Все вопросы требуют ответов.Используйте
Дополнительная информацияАнализ крутящего момента скользящей лестницы
Анализ крутящего момента скользящей лестницы 1 Задача Кирк Т. Макдональд Лаборатории Джозефа Генри, Принстонский университет, Принстон, штат Нью-Джерси, 08544 (6 мая 2007 г.) Проблема лестницы, которая скользит без трения, пока
Дополнительная информацияЛаборатория 8: Баллистический маятник
Лаборатория 8: Баллистический маятник Оборудование: баллистический маятник, 2-метровая линейка, 30-сантиметровая линейка, чистый лист бумаги, копировальная бумага, малярная лента, шкала.Внимание! В этом эксперименте стальной шар проецируется горизонтально
Дополнительная информацияФизика 211 Лекция 4
Физика 211 Лекция 4 Современные концепции: законы Ньютона а) Ускорение вызывается силами б) Сила изменяет импульс в) Силы всегда приходят парами г) Хорошие системы отсчета Механика Лекция 4, слайд 1
Дополнительная информацияНабор задач # 8 Решения
МАССАЧУСЕТСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ Физический факультет 8.01L: Физика I 7 ноября 2015 г. Проф. Алан Гут Набор задач № 8. Решения должны быть сданы к 11:00 в пятницу, 6 ноября, в мусорных баках на перекрестке
. Дополнительная информацияАнимации в Creo 3.0
Анимации в Creo 3.0 ME170, часть I. Введение и краткое описание Анимации обеспечивают полезные демонстрации и анализ движения механизма. В этом документе будут представлены два способа создания анимации движения
Дополнительная информацияЗакон движения Ньютона
Глава 5 Закон движения Ньютона Статическая система 1.Подвешивание двух одинаковых масс Контекст в учебнике: Раздел 5.3, сочетание сил, Пример 4. Вертикальное движение без трения 2. Лифт: замедление
Дополнительная информацияPHY121 # 8 Среднесрочный период I 3.06.2013
PHY11 # 8 Midterm I 3.06.013 AP Physics — законы Ньютона Экзамен AP с несколькими вариантами ответов # 1 # 4 1. Когда система без трения, показанная выше, ускоряется приложенной силой величиной F, напряжение
Дополнительная информацияТЕОРЕТИЧЕСКАЯ МЕХАНИКА
ПРОФ.DR. ING. ВАСИЛЬ СЗОЛГА ТЕОРЕТИЧЕСКАЯ МЕХАНИКА ЗАМЕТКИ И ПРИМЕРЫ ЗАДАЧ ЧАСТЬ ПЕРВАЯ СТАТИСТИКА ЧАСТИЦЫ, ЖЕСТКОГО ТЕЛА И СИСТЕМ ТЕЛ КИНЕМАТИКА ЧАСТИЦЫ 2010 0 Содержание
Дополнительная информацияДвижение протекающей цистерны
1 Проблемное движение протекающей цистерны Кирк Т. Макдональд Лаборатории Джозефа Генри, Принстонский университет, Принстон, штат Нью-Джерси, 8544 (4 декабря 1989 г .; обновлено 1 октября 214 г.) Опишите движение цистерны первоначально
Дополнительная информацияГлава 3.8 и 6 Решения
Глава 3.8 и 6. Решения P3.37. Подготовьтесь: нас просят определить период, скорость и ускорение. Период и частота инвертированы согласно уравнению 3.26. Чтобы найти скорость, нам нужно знать пройденное расстояние
Дополнительная информацияРЕШЕНИЯ ДЛЯ КОНЦЕПЦИЙ ГЛАВА 15
РЕШЕНИЯ К КОНЦЕПЦИЯМ ГЛАВА 15 1. v = 40 см / сек Так как скорость волны постоянна, положение максимума через 5 сек = 40 5 = 00 см вдоль отрицательной оси абсцисс.[(х / а) (т / т)]. Дано y = Ae a) [A] = [M 0 L
Дополнительная информацияCS 4204 Компьютерная графика
CS 4204 Компьютерная графика Компьютерная анимация По материалам заметок Юн Цао Вирджиния Tech 1 Общие принципы анимации Анимация по ключевым кадрам Дополнительные задачи в анимации 2 Классическая анимация Luxo
Дополнительная информацияОсновные принципы микрофлюидики
Основные принципы микрофлюидики 1 Второй закон Ньютона для жидкостей 2-й закон Ньютона (F = ma): Скорость изменения количества движения системы во времени равна чистой силе, действующей на систему! F = dp dt Сумма сил
Дополнительная информацияДомашнее задание 2 Решения
Решения для домашних заданий Игорь Яновский Математика 5Б ТА Раздел 5.3, проблема b: используйте метод Тейлора второго порядка для аппроксимации решения следующей задачи с начальным значением: y = + t y, t 3, y =, с h = 0,5.
Дополнительная информацияГлава 9. Частица увеличена.
Глава 9 9. На рис. 9-36 показана система из трех частиц. Что такое (а) координата x и (б) координата y центра масс системы трех частиц. (c) Что происходит с центром масс
Дополнительная информацияФизика 41 HW Set 1 Глава 15
Physics 4 HW Set Chapter 5 Serway 8 th OC :, 4, 7 CQ: 4, 8 P: 4, 5, 8, 8, 0, 9 ,, 4, 9, 4, 5, 5 Обсуждение задач :, 57, 59, 67, 74 OC CQ P: 4, 5, 8, 8, 0, 9 ,, 4, 9, 4, 5, 5 Задачи обсуждения :, 57, 59,
Дополнительная информацияОсновы гидродинамики
Основы гидродинамики Уравнение Бернулли Очень важным уравнением гидродинамики является уравнение Бернулли.Это уравнение имеет четыре переменные: скорость (), высота (), давление () и плотность
. Дополнительная информацияДеривативы как скорость изменения
Производные как скорость изменения Одномерное движение Объект, движущийся по прямой линии Для объекта, движущегося более сложными способами, рассмотрим движение объекта только в одном из трех измерений
Дополнительная информацияВведение в обратную кинематику серийных манипуляторов
1 Введение в обратную кинематику серийных манипуляторов Sandipan Bandyopadhyay Департамент инженерного проектирования Индийский технологический институт Мадрас, Ченнаи Веб: sandipan 1 Введение Анализ положения является важным шагом в проектировании, анализе и управлении роботами.В этой статье дается базовое введение в анализ положения серийных манипуляторов. Эта тема неизменно освещается во всех учебниках по этому предмету. Поэтому вместо повторения стандартных деталей прямой кинематики, таких как обозначение опорных кадров, определение параметров Денавита-Хартенберга (DH), умножение 4 4 матриц трансформации для получения положения и ориентации конечных эффекторов и т. Д. ., больше внимания уделяется обратной задаче, которая в таких манипуляторах относительно сложнее.Подробно обсуждаются простые примеры, такие как планарный 2-R и пространственный серийный робот 3-R. Связанные понятия, в том числе количество решений обратной кинематической задачи, условие (я) совпадения ветвей решения и их эквивалентности с особенностями, границы рабочего пространства как локусы особых конфигураций и т. Д., Представлены таким образом, чтобы читатель четко следует за ними, ему / ей будет очень легко применить их к другому манипулятору. Включено несколько подходов к одной и той же проблеме, чтобы дать лишь беглый взгляд на богатство этой увлекательной темы и удовлетворить потенциально разные вкусы читателей.Поскольку ожидается, что читатель знаком с основными концепциями, остальная часть статьи будет больше сосредоточена на реальном решении двух репрезентативных примеров, одного плоского и другого пространственного. домен [1, 2, 3]. Для получения более подробной информации читатель может обратиться к стандартным текстам в этом 2-м примере 1: планарный манипулятор 2-R. Давайте рассмотрим один из простейших возможных манипуляторов в этом разделе, а именно планарный серийный робот 2-R. Робот изображен на рис.1. Обозначение 2-R происходит от рисунка 1: Схема плоского серийного робота 2-R. Тот факт, что робот имеет по одному вращающемуся исполнительному механизму (т. Е. Двигатель) на каждом из его сочленений. Задачу кинематики положения (также известную как кинематика нулевого порядка) можно разделить на две подзадачи: прямую и обратную кинематику. Они обсуждаются ниже. 2.1 Прямая кинематика плоского манипулятора 2-R Прямая кинематика относится к проблеме определения положения рабочего органа (в данном случае, представленного точкой p = (x, y) T на рис.1), учитывая длины звеньев l 1, l 2 и входы θ = (θ 1, θ 2) T. Для этого манипулятора задача прямой кинематики тривиально решается, наблюдая рис. 1: x = l 1 cos θ 1 + l 2 cos θ 12, (1) y = l 1 sin θ 1 + l 2 sin θ 12, где θ 12 = θ 1 + θ 2. (2) 2
3 Ур. (1,2) также называются прямой кинематической картой 1, поскольку они отображают совместные углы (θ 1, θ 2) T в координаты вершины (x, y) T. Поскольку эта карта является нелинейной по своей природе, инверсия, т.е.е., найти обратную кинематическую карту, как правило, сложнее. 2.2. Обратная кинематика плоского 2-R манипулятора. Как объяснялось выше, задача в этом случае состоит в том, чтобы найти θ 1, θ 2, заданные x, y. Есть несколько способов решения этой проблемы, и некоторые из них указаны ниже. Тригонометрический метод. Обратите внимание, что уравнения (1,2) нелинейны по θ 1, θ 2, но они линейны по синусам и косинусам θ 1, θ 12. Воспользовавшись этим, мы решаем для cos θ 1, sin θ 1: cos θ 1 = (xl 2 cos θ 12) / l 1 (3) sin θ 1 = (yl 2 sin θ 12) / l 1; л 1> 0.(4) Выше были взяты синус и косинус θ 1 как две разные неизвестные переменные. Очевидно, чтобы завершить решение осмысленно, нам нужно явно указать внутреннюю зависимость этих двух: cos 2 θ 1 + sin 2 θ 1 1 = 0. (5) После выполнения некоторых упрощений уравнение. (5) сводится к следующему виду: a cos θ 12 + b sin θ 12 + c = 0, где (6) a = 2l 2 x, b = 2l 2 y, c = l1 2 l2 2 x 2 y 2. (7) Указанные выше манипуляции служат одной ключевой цели: они сводят пару одновременных уравнений в θ 1, θ 12 к одному уравнению (6) в одном неизвестном θ 12.Однако это уравнение требует дальнейшей обработки, чтобы его можно было решить тригонометрическим путем. Напомним, что в тригонометрии можно напрямую решать только три класса уравнений (и их обратные): cos φ = d, (8) sin φ = e, (9) tan φ = f, где d, e [1, 1 ]; f, φ R. (10) 1 Интересно отметить, что указанное отображение не от R 2 к R 2, как может показаться на поверхности. Если предположить, что оба сустава допускают подвижность в течение полного цикла, т. Е. Нет физического ограничения на совместные движения, тогда θ 1, θ 2 S 1, и, следовательно, (θ 1, θ 2) TT 2 S 1 S 1 .3
4 Следовательно, уравнение. (6) необходимо преобразовать к одной из этих разрешимых форм. Начнем со следующего шага: a a2 + b 2 cos θ 12 + Далее, как показано на рис.2, b a2 + b 2 sin θ 12 + aa = cos ψ и b 2 + b 2 a 2 + b 2 c a2 + b 2 = 0, предполагая, что a2 + b 2> 0. (11) = sin ψ, для некоторого угла ψ, однозначно определяемого: Рисунок 2: Геометрическая интерпретация угла ψ ψ = arctan (b, a), (12) где arctan (sin (), cos ()) представляет функцию арктангенса с двумя аргументами 2.С этим, уравнение. (11) сводится к: c cos ψ cos θ 12 + sin ψ sin θ 12 = (13) a2 + b 2 c cos (θ 12 ψ) = a2 + b, предполагая, что 2 a2 + b 2> 0. (14) Чтобы указанное выше уравнение имело действительное решение в оставшейся неизвестной θ 12, мы должны обеспечить: c [0, 1] a2 + b 2 a 2 + b 2 c 2 0 (15) Если это условие выполняется, то мы получаем : () c θ 12 ψ = ± arccos a2 + b 2 (16) θ 12 = ± arccos (c a2 + b 2) + arctan (b, a). (17) 2 Необходимость такой функции в отличие от ее обычной версии с одним аргументом объясняется в Приложении A.4
5 Таким образом, есть два решения для θ 12 для заданных x, y, при вышеуказанных предположениях. Для каждого из этих решений соответствующие значения θ 1 могут быть вычислены из уравнений. (3,4) как: θ 1 = arctan (y l 2 sin θ 12, x l 2 cos θ 12) (18) Эти две различные пары решений также известны как ветви обратной кинематики. Это в общем случае завершает решение обратной кинематической задачи. Рассмотрим теперь частные случаи, в частности, когда a 2 + b 2 c 2 = 0.После подстановки выражений для a, b, c из уравнения. (7) в уравнение. (15) и выполняя некоторые упрощения, это условие сводится к: (x 2 + y 2 (l 1 l 2) 2) (x 2 + y 2 (l 1 + l 2) 2) = 0 (19) Это может быть видно, что условие (19) выполняется на двух сплошных кругах, показанных на рис. 3. Эти рис. 3: Особенности и рабочее пространство плоских кругов 2-R манипулятора ограничивают набор точек в плоскости, до которых может добраться манипулятор. Другими словами, эти круги определяют границы рабочего пространства (или, точнее, достижимого рабочего пространства) манипулятора.Читатель может легко проверить из уравнения. (16) коллапс двух ветвей решений обратной кинематики в одну в этом случае явление также называется сингулярностью. Подробнее об этом можно прочитать в стандартных учебниках [1, 2, 3]. Наконец, должно быть очевидно, что происходит при нарушении условия (15). В противном случае читатель может узнать об этом подробнее ниже. 5
6 2.2.2 Алгебраический метод Методы алгебраической геометрии очень популярны при изучении кинематики положения роботов-манипуляторов.Разумное введение в тему можно найти в [2] и ссылки в ней. Хотя эти методы могут быть очень мощными, они обычно требуют символических манипуляций, т. Е. Использования систем компьютерной алгебры (CAS), таких как Maple, Mathematica, Singular и т. Д. Поскольку объем обсуждения в этой статье очень ограничен, только обработка одного уравнения будет показано здесь. Читатель может обратиться к [4], чтобы получить теоретические основы решения систем многомерных уравнений, и найти некоторые их приложения в робототехнике в [2].Давайте вернемся к анализу снова в формуле. (6), т.е. после того, как переменная θ 1 была исключена, оставив после себя одномерное уравнение в θ 12. Хорошо известно, что такое уравнение может быть преобразовано в полиномиальное уравнение от одной алгебраической переменной. Это достигается за счет использования двух тригонометрических тождеств: cos θ 12 = 1 t2 1 + t 2, sin θ 12 = 2t 1 + t 2, где t = tan (θ 12/2). (20) Подставляя их в уравнение. (6), мы получаем после некоторой рационализации и сбора подобных терминов: (c a) t 2 + 2bt + (c + a) = 0 (21) Некоторые из наблюдений, сделанных в разделе, очевидны из уравнения.(21). Например, очевидно, что в общем случае есть два решения проблемы. Чтобы исследовать частные случаи, давайте теперь изучим дискриминант квадратного уравнения: = 4 (a 2 + b 2 c 2). (22) Условием наличия двух различных действительных корней является то, что> 0. Неудивительно, что это идентично условию для общего случая, описанного в разделе. Аналогичным образом, = 0 означает повторяющийся действительный корень, а <0 приводит к пара комплексно сопряженных корней, указывающая на то, что заданная позиция для конечного эффектора p (x, y) находится вне досягаемости манипулятора, т.е.е., за пределами его рабочего пространства. Таким образом, физически значимые решения получаются только в случаях 0. Из решений уравнения. (21) неизвестное θ 12 может быть решено как: θ 12 = 2 arctan (t). (23) Почему в этом случае работает версия арктангенсной функции с одним аргументом, а не версия с двумя аргументами, объясняется в Приложении B. 6
7 2.2.3 Геометрический метод Рассмотрим постановку обратной кинематической задачи в другой способ, который не использует прямые кинематические уравнения в качестве отправной точки.На рис. 1 показаны две известные точки: p ‘1 p O C 1 p 1 L C 2 Рис. 4: Геометрическая интерпретация двух ветвей обратной кинематики последовательного манипулятора 2-R: начало координат O и острие p. Точка p 1, являющаяся вершиной звена 1, вынуждена лежать на окружности C 1. Точно так же точка p 1 также лежит на окружности C 2, будучи конечной точкой звена 2. Следовательно, геометрическое место точки p 1 (x 1, y 1) ограничен пересечениями окружностей C 1, C 2. Это изображено на рис. 4, где две ветви обратной кинематики показаны как O-p 1 -p и Op 1- p соответственно.Поскольку 2-R по архитектуре похож на человеческую руку, эти конфигурации обычно называют локтем вниз и локтем вверх соответственно, причем точка p 1 (эквивалентно p 1) является локтем. Далее следуют математические шаги для нахождения двух конфигураций. Уравнения окружностей C 1, C 2 даются соответственно: x y1 2 l1 2 = 0 (24) x y1 2 + x 2 + y 2 2xx 1 2yy 1 l2 2 = 0 (25) Уравнение вычитания. (25) из уравнения. (24) получаем линейное уравнение относительно x, y, которое описывает общую хорду L двух окружностей, проходящих через точки p 1, p 1: 2xx 1 + 2yy 1 x 2 y 2 + l2 2 l1 2 = 0 .(26) 7
8 Решение уравнения. (26) для y 1 получаем: y 1 = l2 1 l2 2 + x 2 + y 2 2xx 1, принимая y 0. (27) 2y Подставляя выражение для y в уравнение одной из окружностей, скажем, C 1, мы получаем квадратное уравнение относительно x 1: a 1 xb 1 x 1 + c 1 = 0, где (28) a 1 = 4 (x 2 + y 2), b 1 = 4x (l 2 1 lx 2 + y 2), c 1 = (x 2 + y 2) 2 + l 4 1 2l 2 1l ll 2 1x 2 2l 2 2x 2 2l 2 1y 2 2l 2 2y 2. Все результаты, полученные другими методами, т.е. , количество решений, условия сингулярности и т. д., также могут быть получены этим методом. Кроме того, из этого анализа вытекает еще одно геометрическое условие сингулярности. В особенности окружности C 1, C 2 касаются друг друга, причем точка касания равна p 1 (что совпадает с p 1 в этой конфигурации). Точно так же общий аккорд становится общей касательной. Читателю предлагается нарисовать особые конфигурации, чтобы подтвердить вышеприведенные предположения. 3 Пример 2: пространственный манипулятор 3-R Рис. 5: Схема пространственного манипулятора 3-R Давайте теперь рассмотрим простой пространственный манипулятор, а именно пространственный 3-R.Робот схематично показан на рис. 5. Несмотря на простоту, архитектура этого манипулятора 8
9 важна по одной причине: он отражает общую конструкцию первых трех суставов и звеньев многих запястий, развязанных 6- промышленные манипуляторы со степенями свободы (6-DoF), такие как PUMA, Kuka, Fanuc и т. д. 3. Другими словами, такие манипуляторы с 6 степенями свободы могут быть сконструированы путем добавления запястья с 3 степенями свободы в точке p из 3 -R пространственный. 3.1 Прямая кинематика пространственного манипулятора 3-R Как и в случае плоского манипулятора 2-R, прямая кинематика довольно тривиальна.Читатель может узнать параметры DH робота и систематически выполнить прямую кинематику, чтобы проверить окончательные результаты, приведенные ниже: x = cos θ 1 (l 2 cos θ 2 + l 3 cos θ 23) (29) y = sin θ 1 (l 2 cos θ 2 + l 3 cos θ 23) (30) z = l 1 + l 2 sin θ 2 + l 3 sin θ 23, где θ 23 = θ 2 + θ 3. (31 ) 3.2 Обратная кинематика пространственного манипулятора 3-R В этом случае есть три неизвестных входа: θ = (θ 1, θ 2, θ 3) T. Вектор положения конечного эффектора, p = (x, y , z) T, известно.В уравнениях. (29,30,31), легко заметить, что переменная θ 1 появляется только в первых двух, и что эти уравнения, опять же, линейны по синусу и косинусу угла θ 1. Следовательно, то же самое принята процедура для определения переменной θ 1 (в терминах других переменных) и исключения ее из системы уравнений, в результате чего получаются следующие уравнения: θ 1 = arctan (y / r, x / r), где r = ± x 2 + y 2 предполагается ненулевым; (32) l 2 cos θ 2 + l 3 cos θ 23 r = 0. (33) Два уравнения (31, 33) представляют собой одновременные линейные уравнения для синусов и косинусов углов θ 2, θ 23.Таким образом, мы обрабатываем эти уравнения так же, как указано выше, чтобы решить и исключить одну из двух переменных, чтобы наконец прийти к одномерному уравнению, которое является нашей конечной целью. 3 Читатели, интересующиеся обратной кинематикой этих манипуляторов с 6 степенями свободы, могут обратиться к стандартному учебнику, например, [2]. 9
10 Выбирая сначала решение для θ 2, мы получаем: θ 2 = arctan (zl 1 l 3 sin θ 23), rl 3 cos θ 23) и (34) 2l 3 r cos θ l 3 (zl 1 ) sin θ 23 r 2 + l2 2 l3 2 (zl 1) 2 = 0 (35) Мы уже видели, как решать уравнения, такие как (35), в разделе. Решая его, мы получаем действительные и различные решения, когда точка p внутри рабочего пространства — повторяющийся реальный корень, когда точка находится на границе рабочего пространства (т.е.е., когда манипулятор является сингулярным), и пара комплексно сопряженных, когда p находится за пределами рабочего пространства. Следуя примеру 2-R, читатель может легко вывести условия для особенностей и границ рабочего пространства. Очевидно, что одно из этих условий уже известно, так как звенья 2, 3 образуют в вертикальной плоскости плоский 2-R. Естественно, это условие не зависит от угла θ 1. Читатель может легко убедиться, что другое условие также не зависит от θ 1. Понимание того, почему это так, остается для читателя в качестве упражнения.Читателю также предлагается нарисовать границы рабочего пространства, а также особые конфигурации манипулятора для лучшего понимания этих концепций. 4 Резюме В этой краткой статье акцент делается на реальном вычислении прямой и, что более важно, обратной кинематики серийных роботов. Подробное теоретическое рассмотрение этих тем доступно во многих учебниках, некоторые из которых упоминаются в справочной литературе. Мы надеемся, что иллюстративные примеры и акцент на лежащих в основе тригонометрических, алгебраических и геометрических концепциях будут хорошо дополнять основные теории, предлагаемые в этих книгах.Рассмотрение более сложных манипуляторов, например, роботов с 6 степенями свободы, таких как PUMA 560, выходит за рамки настоящего обсуждения. Однако понимание концепций, описанных в этой статье, должно помочь читателю следить за анализом таких манипуляторов. Ссылки [1] Дж. Дж. Крейг, Введение в робототехнику: механика и управление. Калифорния: Аддисон Уэсли, второе издание, [2] А. Гхосал, Робототехника: фундаментальные концепции и анализ. Нью-Дели: Oxford University Press,
11 [3] S.К. Саха, Введение в робототехнику. Нью-Дели: Тата МакГроу-Хилл, [4] Д. Кокс, Дж. Литтл и Д. О Ши, Идеалы, разновидности и алгоритмы: введение в вычислительную алгебраическую геометрию и коммутативную алгебру. Нью-Йорк: Springer-Verlag, A Функция арктангенса с двумя аргументами Рис. 6: Полезность функции arctan (sin (), cos ()) На рис. 6 показано, почему arcsin (), arccos () или даже arctan () не использовались в этой статье вместо arctan (sin (), cos ()). Ясно, что arcsin не может различать точки p 1, p 2, arccos между p 1, p 4 и arctan между p 1, p 3, в то время как arctan (sin (), cos ()) отдельно идентифицирует каждую точку отдельно.B Биективность функции тангенса-полуугла Как видно на рис. 7, функция tan (α / 2) биективна в диапазоне α [π, π]. Таким образом, если t α = tan (α / 2), то α = 2 arctan (t α) всегда возвращает однозначный результат. 11
12 tan Α в радианах Рис. 7: График tan (α / 2) в зависимости от α [π, π] 12
Пример кинематических задач с решениями: Блок 1: Кинематика
Ниже приводится множество задач, связанных с равномерно ускоренным движением вдоль линии.В решении будет указан список известных количеств, за которым следует список требуемых количеств. Уравнения, которые будут использоваться, будут обозначены номерами из списка ниже, но алгебраическая работа по решению уравнений будет оставлена на усмотрение учащегося. В большинстве проблем будут обсуждаться альтернативные методы решения или предложения и подсказки относительно того, как бороться с этим конкретным типом проблемы. Не пытайтесь просто прочитать этот раздел. Вы должны использовать карандаш, бумагу и калькулятор, чтобы получить максимальную отдачу от изучения этих задач.Уравнение 4: v f = v i + aΔt
Уравнение 5: Δx = v i Δt + a (Δt) 2Уравнение 6: v f 2 = v i 2 + 2aΔd
Пример задачи № 1
Автомобиль трогается с места и разгоняется с равномерным ускорением 10. Подсчитайте, сколько времени потребуется автомобилю, чтобы разогнаться до скорости 90 (чуть более 60 миль в час), и рассчитайте расстояние, которое автомобиль пройдет за это время.Пример решения № 1
Эта проблема может быть решена прямым применением уравнения 4 для нахождения Δt и уравнения 5 для нахождения ΔX. Учащийся должен продемонстрировать, что правильные ответы: Δt = 9 с и ΔX = 405 футов. По возможности рекомендуется попытаться найти ответы, используя несколько иные процедуры. Например, в этой задаче можно выполнить быструю проверку, используя вычисленное вами значение Δt из уравнения 4, чтобы найти среднюю скорость, а затем установите X = V avg Δt, чтобы получить 405 футов другим способом.Второй другой метод заключается в использовании уравнения 6 и значения Δt, полученного из уравнения 4, для расчета ΔX. Однако, хотя оба альтернативных метода являются хорошими проверками достоверности ваших расчетов, лучше по возможности избегать использования ответа на одну часть в качестве основы для второго расчета.
Пример задачи № 2
Автомобиль движется на 30 остановках с постоянным ускорением на расстояние 100 м. Рассчитайте ускорение и время до остановки.Пример решения № 2
Для решения проблемы примените уравнение 5, чтобы найти ускорение (a = -4.5). Используйте рассчитанное значение ускорения, чтобы найти время (Δt = 6,67 с), используя уравнение 4 или 6 (4 проще).Пример задачи № 3
Объясните значение знака минус в задаче 2.
Пример решения № 3
Ускорение в отрицательном направлении. Поскольку V было произвольно задано положительное направление, ускорение должно быть в противоположном направлении.
Пример задачи № 4
Предположим, что автомобиль в задаче 2 сохраняет такое же ускорение еще 5 секунд.Найдите его скорость и положение в конце этого времени.
Пример решения № 4
Обратите внимание, что здесь нас спрашивают не о ΔX, а о X, позиции в конце 5-й секунды. Мы должны быть уверены, что указали позицию недвусмысленно, либо относительно позиции автомобиля в начале задачи 2, либо относительно ее положения в конце задачи 2 и в начале этой задачи. Мы поместим начало системы отсчета в положение автомобиля в начале задачи 2.Таким образом, в конце задачи 2 он имеет позицию X = 100 м. Используя уравнение 6 с данными, перечисленными выше, мы видим, что ΔX = -56,25 м. Таким образом, конечное положение автомобиля составляет 100 — 56,25 или 43,75 м. Чтобы найти скорость, используйте уравнение 4 и получите скорость — 22,5. Полный ответ на проблему можно сформулировать следующим образом: «Автомобиль находится на расстоянии 43,75 м от начальной точки в том направлении, в котором он первоначально двигался. Он движется обратно к начальной точке со скоростью 22,5 м и ускоряется к начальной точке. с ускорением 4.5. «Это утверждение гораздо более значимо, чем просто записать X = 43,75 м и V = -22,5.Пример задачи № 5
По бейсболу бьют вертикально с начальной скоростью 45. Вычислить:(а) время до того, как он вернется на уровень, на котором он был запущен.
(b) максимальная высота, которую достигает мяч.
(c) положение, скорость и ускорение через 6 секунд после удара.
(d) положение и скорость через 12 секунд после удара.
Пример решения № 5
Внимательно прочтите эту задачу и определитесь с порядком ее выполнения.Имейте в виду факты, упомянутые в подсказках, такие как: время, необходимое для достижения вершины, равно половине общего времени нахождения в воздухе; скорость наверху равна нулю; и скорость, когда она достигает того же уровня, совпадает с начальной скоростью. В задачах, состоящих из нескольких частей, таких как эта, необходимо будет перечислить заданные количества для каждой части. Решая проблему, убедитесь, что ответы в различных разделах соответствуют друг другу. Перед тем, как приступить к проблеме, определитесь, какое направление назвать положительным.В этой задаче мы будем называть восходящее направление положительным, а нисходящее — отрицательным.
(а)Это просто. Вы можете использовать уравнение 4 или 6. Если используется уравнение 6, вы получите два корня, Δt = 0 или 9,2 секунды. Первый корень, 0, соответствует тому моменту, когда мяч впервые попадает на начальный уровень. Второй корень — это желаемый ответ, время, когда мяч возвращается на начальный уровень.
(б)V f
0 (скорость наверху равна нулю)
Используйте уравнение 4, чтобы найти Δt = 4.6 с. Обратите внимание, что это половина общего времени, найденного в части a, поэтому эти два вычисления согласуются друг с другом. Используйте уравнение 5, чтобы показать, что X = 103,3 м. Для проверки вашей работы включите полученное значение Δt в уравнение 6 и посмотрите, получено ли такое же значение для ΔX, оно должно быть.
(c) Здесь нет проблем. Используя уравнение 4, найдите, что мяч имеет скорость -13,8. Отрицательный знак показывает, что мяч движется вниз. Это согласуется с тем, что мы обнаружили в части b, что время достижения вершины траектории равно 4.6 секунд. Через 6 секунд мяч достигнет вершины и начнет двигаться вниз, поэтому его скорость должна быть отрицательной. С помощью уравнения 6 найдите, что ΔX составляет 93,6 м. Если мы возьмем начальную точку движения в точке X = 0, тогда позиция будет равна ΔX, так что мяч будет на 93,6 м выше начальной точки. Опять же, это согласуется, поскольку смещение меньше максимальной высоты 103,3, найденной в части b. Наконец, обратите внимание, что уравнение 6 дает изменение положения, а не пройденное расстояние. На самом деле мяч пролетел дальше 93.6 мес. Он достиг вершины своего полета, 103,3 м, и вернулся к точке на высоте 93,6 м над землей, на расстоянии 9,7 м. Таким образом, общая дистанция составляет 113 м. Задача также требует ускорения при t = 6 секунд, но пока мяч остается в свободном падении, ускорение остается постоянным и составляет -9,8. (г) Не попадитесь здесь. Вас попросили определить скорость и положение на 12 секундах. У вас может возникнуть соблазн повторить процедуру, описанную в части c, но если вы это сделаете, полученные ответы не будут разумными.Величина скорости будет больше 45, а положение будет отрицательным. Это может произойти, только если в земле есть яма, и мяч упал в нее и теперь находится ниже уровня земли. Вы должны сразу заметить, что 12 с больше времени, которое требуется мячу, чтобы вернуться в исходное положение. Правильный ответ заключается в том, что скорость и положение мяча нельзя определить из предоставленной информации, поскольку мяч больше не находится в свободном падении.Пример задачи № 6
Мяч, упавший с крыши высокого здания, со скоростью 96 пролетел через подоконник и упал на землю 1.0 секунд спустя.а) Какова высота окна?
б) Какова высота здания?
Пример решения № 6
(а)Обратите внимание, что, поскольку все движение идет вниз, мы решили назвать нисходящее направление положительным. Мы назвали скорость в начале последней секунды: V и . ΔX можно легко найти, применив уравнение 6. (ans: ΔX = 112 футов). Поскольку это расстояние, на которое мяч упал за последнюю секунду, это должна быть высота окна.
(б) Есть несколько способов решить эту часть проблемы. Можно рассчитать время падения в окно, используя уравнение 4, добавить 1 секунду, чтобы получить общее время, и использовать общее время, чтобы найти расстояние, используя уравнение 6. Можно использовать информацию, известную о последней секунде падения, чтобы найдите конечную скорость (используйте уравнение 5) и используйте это, чтобы найти общее расстояние, на которое упало (снова используйте уравнение 5). Другой метод — использовать скорость в начале движения (0), скорость у окна и ускорение силы тяжести, чтобы найти расстояние от вершины здания до окна.Добавьте 112 футов, чтобы получить общую высоту. Мы должны решить, как мы собираемся решить проблему, прежде чем составлять нашу таблицу известных величин. Мы сделаем это в последнюю очередь.Используйте уравнение 5, чтобы найти ΔX = 144 фута. Поскольку это только высота от верха здания до окна, мы должны добавить расстояние до земли, 112 футов, чтобы получить высоту здания: 256 футов.
Кинематика 11 класс Физика Численное | Решения
1.
Солнечная,
Смещение y = $ — \ frac {2} {3} $ t 2 + 16t + 2
Скорость v = $ \ frac {{{\ rm {dy}}}} {{{\ rm {dt}}}} $ = $ — \ frac {2} {3} $ * 2t + 16 = $ — \ гидроразрыв {4} {3} $ t + 16
Когда тело приходит в состояние покоя v = 0.
Или, $ — \ frac {4} {3} $ t + 16 = 0
Или t = 16 * $ \ frac {3} {4} $ = 12 с
Время, необходимое для отдыха тела, составляет 12 секунд.
2.
Солнечная,
Смещение тела в заданном интервале может быть получено по площади, ограниченной графиком скорость — время.
Пусть d 1 , d 2 , d 3 , d 4 будет смещением в первой секунде, второй секунде, третьей секунде и четвертой секунде.
Или, d = d 1 + d 2 + d 3 + d 4
= (10 + 20 + 15 + 10) м
= 55 м
3.
Солнечная,
Пусть t 1 и t 2 — это время, необходимое автобусу для перемещения из парка Ратна в Калимати и из Калимати в Ратнапарк соответственно.
Расстояние, которое проехал микроавтобус от парка Ратна до Калимати, составляет:
x 1 = 40 т 1
Точно так же расстояние, которое проезжает микроавтобус, чтобы добраться от Калимати до парка Ратна, составляет:
x 2 = 60 т 2
Так как, x 1 = x 2
Или, 40 т 1 = 60 т 2
Или: $ \ frac {{{{\ rm {t}} _ 1}}} {{{{\ rm {t}} _ 2}}} $ = $ \ frac {{40}} {{60}} $ = $ \ frac {2} {3}
долларов СШАСредняя скорость = $ \ frac {{{\ rm {total \: distance \: traveled}}}} {{{\ rm {total \: time \: take}}}} $
= $ \ frac {{{{\ rm {x}} _ 1} + {{\ rm {x}} _ 2}}} {{{{\ rm {t}} _ 1} + {{\ rm {t}) } _2}}}
долларов= $ \ frac {{40 {{\ rm {t}} _ 1} + 60 {{\ rm {t}} _ 2}}} {{{{\ rm {t}} _ 1} + {{\ rm { t}} _ 2}}}
долларов= $ \ frac {{{{\ rm {t}} _ 2} \ left ({40 \ frac {{{{\ rm {t}} _ 1}}} {{{{{\ rm {t}}} _ 2}) }} + 60} \ right)}} {{{{\ rm {t}} _ 2} \ left ({\ frac {{{{\ rm {t}} _ 1}}} {{{{{\ rm {t }} _ 2}}} + 1} \ right)}}
долларов= $ \ frac {{\ left ({40 {\ rm {*}} \ frac {2} {3} + 60} \ right)}} {{\ frac {2} {3} + 1}} $
Итак, В ср. = 48км / час.
Т.к., полное перемещение микроавтобуса составляет 0,
.Итак, средняя скорость = $ \ frac {{{\ rm {total \: displacement \: traveled}}}} {{{\ rm {total \: time \: take}}}} $
= $ \ frac {0} {{{{\ rm {t}} _ 1} + {{\ rm {t}} _ 2}}}
долларов СШАИтак, В ср. = 0.
4.
Солнечная,
Пусть A будет положением вершины башни, а B — положением земли. Предположим, они встречаются в точке C.
Для сброшенного объекта, пройденное расстояние,
S = ut + $ \ frac {1} {2} $ gt 2
Или, x = 0 * t + $ \ frac {1} {2} $ gt 2
Или, x = $ \ frac {1} {2} $ gt 2 … (i)
для объекта «Снаряд»,
Или, s = ut — $ \ frac {1} {2} $ gt 2
Или, h — x = 78.4t — $ \ frac {1} {2} $ gt 2 .
Или 156,8 = 78,4 т
Итак, t = 2с.
Подставляя t = 2 с в уравнение (i), получаем,
Или, x = $ \ frac {1} {2} $ * 9,8 * 2 2 = 19,6 м
Следовательно, они встречаются ниже 19,6 м от вершины башни через 2 секунды. 2}} $ = $ \ sqrt {100 + 25} $ = $ 5 \ sqrt 5 $ м / с.
Пусть θ — угол между $ {\ rm {\ vec V}} $ dw с $ {\ rm {\ vec V}} $ d .
Итак, tanθ = $ \ frac {{{{\ rm {V}} _ {\ rm {m}}}}} {{{{\ rm {V}} _ {\ rm {d}}}}} $.
Или tanθ = $ \ frac {5} {{10}} $.
Итак, θ = tan -15 $ \ left ({\ frac {5} {{10}}} \ right) $ = tan -1 $ \ left ({\ frac {1} {2}} \ right) $.
6.
Солнечная,
Максимальная дальность R = 16 км = 1600 м.
Или, g = 10 мс -1 .2}}} {{\ rm {g}}} $.
Или, u 2 = Rg.
= 16000 * 10
= 160000
Итак, u = 400 мс -1 .
7.
Солнечная,
Скорость полицейского фургона V p = 30 км / ч -1 .
= $ \ frac {{30 {\ rm {*}} 1000}} {{60 {\ rm {*}} 60}} $ = 8,3 мс -1 .
Скорость воровской машины V т = 192 км / ч -1 .
= $ \ frac {{192 {\ rm {*}} 1000}} {{60 {\ rm {*}} 60}} $ = 53.3 мс -1 .
Скорость полета пули к полицейскому фургону V bp = 150 мс -1 .
Итак, скорость пули относительно окружающего V b = (150 + 8,3) мс -1 .
= 158,3 мс -1 .
Итак, скорость пули, которая попадает в вора
Автомобиль = 158,3 — 53,3
= 105 мс -1 .
8.
Солнечная,
Начальная скорость u = 12 м / с в направлении вверх.2}}} {{2 {\ rm {*}} 10}} $ = $ \ frac {{144}} {{20}} $ = 7,2 м
Пусть v 1 будет скоростью пакета, с которым он ударяется о землю.
В 1 2 = u 1 2 + 2g (h + x)
Или, v 1 2 = 0 + 2 * 10 * (65 + 7.2)
= 1444,
Итак, v 1 = 38 м / с.
Время, необходимое пакету, чтобы добраться до C от B, чтобы сказать t 1 = $ \ frac {{{\ rm {Final \: velocity}} — {\ rm {initital \: velocity}}}} {{{ \ rm {ускорение \: due \: to \: gravity}}}} $
= $ \ frac {{0 — \ left ({- 12} \ right)}} {{10}}
долларов США= 1.2 сек.
Время, необходимое пакету, чтобы достичь земли от B, чтобы сказать t 2 = $ \ frac {{38 — 0}} {{10}} $ = 3,8 сек.
Итак, общее время, занятое пакетом, скажем, t = t 1 + t 2
= 1,2 + 3,8
= 5 сек.
9.
Солнечная,
Здесь точки A, B и C представляют положение самолета, положение парашютиста, где он открывает парашют и указывает на землю соответственно, Пусть V 1 , V 2 и V 3 будет скоростью парашютиста в точках A, B и C соответственно,
В 2 2 = В 1 2 + 2gS 1
В 2 2 = 0 + 2 * 9.2}}} {{2 {\ rm {*}} 2}} $ = 195 млн. Долл. США.
Итак, общее расстояние, пройденное парашютистом, равно = (195 + 40) м = 235м.
Т.е. высота выхода парашютиста от земли 235м.
Период времени для преодоления расстояния S 1 , скажем, t 1 = $ \ frac {{{{{\ rm {V}} _ 2} — {{\ rm {V}} _ 1}}} {{\ rm {g}}} $ = $ \ frac {{28 — 0}} {{9.8}} $ = 2,9.
Период времени для прохождения расстояния S 2 sat t 2 = $ \ frac {{{{\ rm {V}} _ 2} — {{\ rm {V}} _ 1}}} {{\ rm {a }}} $ = $ \ frac {{28 — 0}} {2} $ = 13.
Итак, период нахождения в воздухе = (13 + 2,9) с = 15,9 с.
10.
Солнечная,
Здесь данный случай можно принять таким образом, что бомба выбрасывается горизонтально со скоростью 500 км / ч -1 на высоте 1500 м от земли.
Итак, горизонтальный диапазон (R) = $ \ sqrt {\ frac {{2 {\ rm {h}}}} {{\ rm {g}}}} $ u o
= $ \ sqrt {2 {\ rm {*}} \ frac {{1500}} {{9.8}}} $ * $ \ frac {{500 {\ rm {*}} 1000}} {{36000}} $
= $ \ sqrt {306.2} \ theta}} {{2 {\ rm {g}}}}
долларов СШАИли, sin 2 θ = 2 * 2sinθ.cosθ
Или $ \ frac {{{\ rm {sin}} \ theta}} {{{\ rm {cos}} \ theta}} $ = 4
Или, tanθ = 4
Или, θ = tan -1 (4) = 75,96 °
Следовательно, угол, при котором R и h max составляет 75,96 °.
12.
Солнечная,
Дано,
u = 10 мс -1
v = 15 мс -1
а = 1 мс -1
(i) затраченное время t = $ \ frac {{{\ rm {v}} — {\ rm {u}}}} {{\ rm {a}}} $ = $ \ frac {{15 — 10} } {1} $ = 5 сек.2} + 2 {\ rm {*}} 1 {\ rm {*}} 100}
долларов США= $ \ sqrt {100 + 200}
долларов= $ \ sqrt {300}
долларов США= 17,3 м / с.
13.
Солнечная,
Начальная скорость, u = 20 м / с
Конечная скорость, v = 0.
Пусть t — время, необходимое для достижения максимальной высоты.
(i) Время, затраченное на возвращение к метателю, 2t =?
(ii) Достигнутая максимальная высота, h =?
Теперь у нас есть
(i) Мы знаем,
v = u + gt
или, 0 = 20 — 10 т
или, 10т = 20
Итак, t = 2сек,
Итак, 2t = 4сек,
(ii) Опять же,
s = ut + $ \ frac {1} {2} $ gt 2
= 20 * 2 + $ \ frac {1} {2} $ (- 10) * 2 2 = 40 — 20 = 20 м
Так, h = 20м
14.
Солн:
Начальная скорость, u = 0
Высота h = 20м.
Для движения вниз имеем,
Или, v 2 = u 2 + 2gh
= 0 2 + 2 * 10 * 20 = 400
Итак, V = 20м / с.
Для движения вверх, пусть u ’будет начальной скоростью, тогда начальная скорость u’ = $ \ frac {3} {4} $ * v
= $ \ frac {3} {4} $ * 20 = 15 м / с.
И конечная скорость, v ’= 0.
Время, необходимое для достижения максимальной высоты, определяется как v ’= u’ — gt ’
Или, 0 = 15–10 т ’
Итак, t ’= 1.5сек.
Следовательно, временной интервал между первым и вторым скачками 2t ’= 3сек.
15.
Солнечная,
(i) для вертикального движения вниз, имеем
Или, h = ut + $ \ frac {1} {2} $ gt 2
Или 45 = 0 * t + $ \ frac {1} {2} $ * 10t 2
Или, 10т 2 = 90
Итак, t = 3 сек.
(ii) для горизонтального движения,
В x = $ \ frac {{\ rm {x}}} {{\ rm {t}}}
долларов СШАИли, x = v * t = 10 * 3
Итак, x = 30m
(iii) Для вертикального движения вниз,
В y = u + gt
= 0 + 10 * 3 = 30 м / с
Из рисунка имеем,
Tanθ = $ \ frac {{{{\ rm {V}} _ {\ rm {y}}}}} {{{{\ rm {V}} _ {\ rm {x}}}}} $ = $ \ frac {{30}} {{10}}
долларов СШАИтак, θ = tan -1 (3)
Итак, θ = 71.6 °.
Скорость составляет с горизонтом угол 71,6 °.
16.
Солнечная,
Дано,
Скорость снаряда, u = 320 м / с
Угол по горизонтали, θ = 30 °.
(i) Пора достичь максимальной высоты, $ \ frac {{\ rm {T}}} {2} $ =?
(ii) Горизонтальный диапазон, R =?
(iii) Максимальный горизонтальный диапазон, R max =?
Теперь у нас есть
(i) T = $ \ frac {{2 {\ rm {u}}.2}}} {2} $.
Или, т 2 = 2
Итак, t = 1.41 сек
(iii) Когда объект подбрасывается по плоскости,
Начальная скорость, u = 15 м / с
Конечная скорость, v = 0
Ускорение, a = -5м / с 2
Время, необходимое для отдыха, t =?
Мы знаем,
Или, v = u + при
Или, 0 = 15 — 5 * t
Или t = $ \ frac {{15}} {5} $ = 3 сек.
(iv) Здесь, пройденное расстояние,
h = ut + $ \ frac {1} {2} $ при 2
= 15 * 3 + $ \ frac {1} {2} $ (-5) (3) 2
= 45 — $ \ frac {{45}} {2} $ = $ \ frac {{90 — 45}} {2} $ = 22.2}} $ = $ \ sqrt {64 + 36} $ = 10 км / ч -1 .
(ii) Опять же, из $ \ Delta $ ABC,
Tanθ = $ \ frac {{{{\ rm {V}} _ {\ rm {B}}}}}} {{{{\ rm {V}} _ {\ rm {A}}}}} $ = $ \ frac {6} {8} $.
Или θ = tan -1 $ \ left ({\ frac {6} {8}} \ right) $ = 36,87 °.
А из $ \ Delta $ ABO,
Sinθ = $ \ frac {{{\ rm {BO}}}} {{{\ rm {AB}}}}
долл. СШАИли, BO = ABsinθ = 4 * sin36,87 ° = 2,4 км
Итак, БО = 2.4км.
20.
Солнечная,
Дано:
Скорость снаряда, u = 500 мс -1 .2} {\ rm {sin}} 2 \ theta}} {{\ rm {g}}}
долларов СШАИли u 2 = $ \ frac {{{\ rm {Rg}}}} {{{\ rm {sin}} 2 \ theta}} $
Или u = $ \ sqrt {\ frac {{{\ rm {Rg}}}} {{{\ rm {sin}} 2 \ theta}}} $
Здесь u будет наименьшим, когда sin2θ будет максимальным.
Максимальное значение sin2θ = 1, а наименьшая скорость для получения того же диапазона равна u минимум = $ \ sqrt {\ frac {{{\ rm {Rg}}}} {1}} $ = $ \ sqrt {{\ rm {Rg}}} $ = $ \ sqrt {21651 {\ rm {*}} 10}
долларовИтак, u минимум = 46 м / с.
21.
Солнечная,
Ускорение (а) = 4 м / с.
При t = 0, x o = 5 м к востоку от указателя,
Начальная скорость u = 15 мс -1 .
(i) Время t = 2 с,
Позиция (X) =?
скорость (V) =?
Мы знаем,
X = X 0 + ut + $ \ frac {1} {2} $ в точке 2
= 5 + 15 * 2 + $ \ frac {1} {2} $ * 4 * 2 2
= 5 + 30 + 8 = 43м
Опять же, v = u + при
= 15 + 4 * 2 = 23 м / с
(ii) Конечная скорость v = 25 мс -1 .
Время t = $ \ frac {{{\ rm {v}} — {\ rm {u}}}} {{\ rm {a}}} $
= $ \ frac {{25-15}} {4} $ = $ \ frac {5} {2} $ = 2,5 сек.
А, расстояние X = X 0 + ut + $ \ frac {1} {2} $ в точке 2
= 5 + 15 * 2,5 + $ \ frac {1} {2} $ * 4 * 2,5 2
= 5 + 37,5 + 12,5 = 55м.
Итак, x = 55 м восточнее фонарного столба.
22.
Солнечная,
Предположим, что автомобилист и полицейский участок находятся в точке 0 и оба движутся вместе.Время t, необходимое обоим для встречи в точке P, одинаково.
(i) Для автомобилиста расстояние перенесено от 0 до p
X м = u м + $ \ frac {1} {2} $ в точке 2 = $ \ frac {1} {2} $ в точке 2
Так, X м = X p
Итак, u mt = $ \ frac {1} {2} $ at 2
= 15 т = $ \ frac {1} {2} $ * 3 т 2
Итак, t (t — 10) = 0
Либо t = 0, либо t = 10 сек. Офицер ловит автомобилиста через 1 сек.
(ii) Скорость офицера в момент времени t.
В p = u + at = 0 + 3 * 10 = 30 м / с
23.
Солн:
Начальная скорость, u = 15 м / с
Ускорение свободного падения g = 10 м / с.
(i) Положение и скорость в момент времени t после того, как мяч покидает руку, даются соответственно как:
y = ut + $ \ frac {1} {2} $ при 2
= 15 * t + $ \ frac {1} {2} $ (- 9,8) t 2
А v = u + at = 15 — 9.8т
Когда t = 1 с.
Или, y = 15 * 1 — $ \ frac {{9.8}} {2} $ = 10,1 м
Мяч находится на 10,1 м над исходным положением и движется вверх со скоростью 5,2 м / с.
Когда t = 4 с, пройденное расстояние y = 18,4 м и скорость v = -24,2 м / с
Мяч находится на 18,4 м ниже исходного положения и движется вниз со скоростью 24,2 м / с.
(ii) Когда мяч находится на высоте 5 м над перилами, скорость задается как:
Или, v 2 = u 2 + 2as
Или, v 2 = 15 2 + 2 * (-9.8) * 5
= 11,3 м / с
(iii) В самой высокой точке v = 0.
Время достижения максимальной высоты, определяемое как v = u + при
.Или, 0 = 15 — 9,8 * t
Или, t = 1,53 сек.
Если S — расстояние максимальной высоты от крыши здания,
V 2 = u 2 + 2as.
Или, 0 = 15 2 + 2 * (-9,8) * 5
Или, S = 11,5 м
Время прохождения расстояния (11,5 + 5) м определяется выражением S = ut + $ \ frac {1} {2} $ в точке 2
Или, $ \ frac {1} {2} $ на 2 = 16.5
Или, t 2 = $ \ frac {{33}} {{9.8}}
долларов СШАИли, t = 1,83 сек.
Следовательно, общее время, затрачиваемое мячом, составляет (1,53 + 1,83) сек = 3,36 сек. После он уйдет из вашей руки.
24.
Солнечная,
У нас,
Или, X (t) = bt 2 — ct 3 , поэтому,
Для t = 0, x (0) = 2,4 * 0 2 — 0,12 * 0 3 = 0
(i) мгновенная скорость, v =?
Мы знаем,
V = $ \ frac {{{\ rm {dx}}}} {{{\ rm {dt}}}} $ = $ \ frac {{{\ rm {d}} \ left ({{\ rm { b}} {{\ rm {t}} ^ 2} — {\ rm {c}} {{\ rm {t}} ^ 3}} \ right)}} {{{\ rm {dt}}}} $ = 2bt — 3ct 2
(а) Для t = 0, v = 0
(b) Для t = 5 с V = 2 * (2.4) (5) — 3 (0,12) (5) 2 = 15 м / с
(c) Для t = 10 с, v = 2. (2,4) (10) — 3 (0,12) (10) 2 = 12 м / с
(ii) Для V = 0, t = 0.
У нас,
Или, v = 2bt — 3ct 2
Или, 0 = 2bt — 3ct 2
Или, 0 = 2bt — 3ct 2
Или, 3ct 2 = 2bt
Или, 3ct = 2b
Или, t = $ \ frac {{2 {\ rm {b}}}} {{3 {\ rm {c}}}} $ = $ \ frac {{2 \ left ({2.4} \ right)} } {{3 \ left ({0.12} \ right)}} $ = 13,3 сек.
Итак, t = 13,3 сек.
25.
Солнечная,
Или, x (t) = 50 + 2t — 0,0625t 2
(i) исходное положение X (0) =?
Начальная скорость V (0) =?
Начальное ускорение a (0) =?
Мы знаем, что V (t) = $ \ frac {{{\ rm {d *}} \ left ({\ rm {t}} \ right)}} {{{\ rm {dt}}}} $ = 2 — 0,0625 * 2т
Или, V (t) = 2 — 0,125 т
И ускорение a (t) = $ \ frac {{{\ rm {dv}} \ left ({\ rm {t}} \ right)}} {{{\ rm {dt}}}} $ = $ \ гидроразрыв {{{{\ rm {d}} ^ 2} \ left ({\ rm {t}} \ right)}} {{{\ rm {d}} {{\ rm {t}} ^ 2}} } $
= -0.125
Итак, x (0) = 50 + 2 * 0 — 0,0625 * 0 2
= 50 см
Или, V (0) = 2 — 0,125 * 0
= 2 см / с
Или, a (0) = -0,125 см / с 2
(ii) Здесь V (t) = 0
Или, 2 — 0,125t = 0
Или, t = $ \ frac {2} {{0,125}} $ = 16 сек.
Следовательно, скорость ползания черепахи становится равной нулю через 16 секунд.
26.
Солн:
Расстояние между двумя точками, s = 70 м
Затраченное время, t = 7 с.
Скорость во второй точке, v = 15 м / с
(i) Скорость в первой точке, u =?
Мы знаем, $ \ frac {{\ rm {s}}} {{\ rm {t}}} $ = $ \ frac {{{\ rm {u}} + {\ rm {v}}}} { 2}
долларов СШАИли u + v = $ \ frac {{2 {\ rm {s}}}} {{\ rm {t}}}
долларовИли u = $ \ frac {{2 {\ rm {s}}}} {{\ rm {t}}} $ — v = $ \ frac {{2 {\ rm {*}} 70}} { 7} $ — 15
Или, u = 20-15 = 5 м / с
(ii) Ускорение антилопы, a =?
Мы знаем, a = $ \ frac {{{\ rm {v}} — {\ rm {u}}}} {{\ rm {t}}} $ = $ \ frac {{15 — 5}} { 7} $ = 1.2}}} $ = 8,75 м / с 2 .
Опять же, v = u + при
Или, v = 0 + 8,75 * 8
Итак, v = 70м / с
Следовательно, скорость света самолета при взлете составляет 70 м / с.
28.
Солн:
Для первого случая
Начальная скорость u = 0,
Ускорение a = 1,6 м / с 2 .
Период времени t = 14 сек.
Итак, пройденное расстояние S 1 = ut + $ \ frac {1} {2} $ at 2
= 0 + $ \ frac {1} {2} $ * 1.6 * (14) 2
= 156,8 м
Итак, Конечная скорость v = u + at = 0 + 1,6 * 14 = 22,4 м / с
Для второго случая
Начальная скорость u = 22,4 м / с
Период времени t = 70 сек.
Так как скорость остается постоянной. Итак, расстояние, пройденное поездом метро, составляет
.S 2 = 22,4 * 70
= 1568 м
Для третьего корпуса
Начальная скорость u = 22,4 м / с
замедление = 3,5 м / с 2
Конечная скорость v = 0.
Затраченное время t = $ \ frac {{{\ rm {u}} — {\ rm {v}}}} {{\ rm {a}}} $ = $ \ frac {{22.4}} {{3.5} } $ = 6,4 сек.
Пройденное расстояние S 3 = ut — $ \ frac {1} {2} $ at 2
= 22,4 * 6,4 — $ \ frac {1} {2} $ * 3,5 * (6,4) 2
= 143,36 — 71,68
= 71,68 м
Итак, общее расстояние, пройденное поездом, составляет:
S = S 1 + S 2 + S 3
= 156,8 + 1568 + 71,68
= 1796.48м
29.
Солн:
h = 0,44 м
Конечная скорость v = 0,
Начальная скорость u = 0,
Если t — период времени для достижения высоты h
Общее время в воздухе, 2t =?
У нас,
Или, v 2 = u 2 — 2gh
Или, 0 = u 2 — 2gh
Или, u 2 = 2gh
Или u = $ \ sqrt {2 {\ rm {gh}}} $ = $ \ sqrt {2 {\ rm {*}} 9.8 {\ rm {*}} 0.44} $ = 2,94 м / с.
Итак, начальная скорость u = 2,94 м / с.
снова,
v = u — gt
или, 0 = u — gt
или, t = $ \ frac {{\ rm {u}}} {{\ rm {g}}} $.
Итак, общее время нахождения в воздухе, 2t = $ \ frac {{2 {\ rm {u}}}} {{\ rm {g}}} $ = $ \ frac {{2 {\ rm {*}} 2,94 }} {{9.8}} $ = 0,6 сек.
Итак, Общее время, оставшееся в эфире = 0,6 сек
30.
Солнце: Здесь,
u = 6 м / с
(i) Скорость через 2 секунды, v =?
и.2} + 2 {\ rm {*}} 9,8 {\ rm {*}} 10} $ = 15,2 м / с
Итак, V = 15,2м / с
32.
Солн:
Для g = 9,8 м / с 2 .
Пусть u будет начальной скоростью, с которой вы можете прыгать вперед.
Или, v = u — gt.
Или, t = $ \ frac {{\ rm {u}}} {{\ rm {g}}} $ = $ \ frac {{\ rm {u}}} {{9.8}} $
Или, u = 9,8 т
А, h = ut — $ \ frac {1} {2} $ gt 2
For, g ’= 0,98 м / с 2 .
Или, t ‘= $ \ frac {{\ rm {u}}} {{{\ rm {g’}}}} $ = $ \ frac {{9.8 {\ rm {t}}}} {{\ rm {g}}} $ = 10т.
И h ’= ut’ — $ \ frac {1} {2} $ g’t ’ 2
= u * 10t — $ \ frac {1} {2} $ * 0,98 * (10t) 2
= 10ut — $ \ frac {1} {2} 98t $ 2
= 10 (ut — $ \ frac {1} {2} 9,8 т. Долл. США 2 )
= 10 (ut — $ \ frac {1} {2} $ gt 2 )
= 10 ч
= 10 * 0,75
Итак, h ’= 7,5 м
Следовательно, человек может прыгать 7.5 м, когда ускорение свободного падения составляло всего 0,98 м / с 2 вместо 9,8 м / с 2 .
34.
Солн:
Пусть A, B, C обозначают позицию человека, позицию таракана и позицию счетчика.
For, таракан,
с = 1,2 м
v = 1,5 м / с, a = 0
Итак, период времени (t) = $ \ frac {{\ rm {s}}} {{\ rm {v}}} $ = $ \ frac {{1.2}} {{1.5}} $ = 0,6 секунды.
на человека,
Или, s = 1.2 + 0,9 = 2,1 м = пройденное расстояние,
Или, v = 0,8 м / с
Итак, период времени такой же, как у таракана
Итак, t = 0,6 сек.
Разгон a =?
Теперь у нас есть
S = ut + $ \ frac {1} {2} $ при 2
Или 2,1 = 0,8 * 0,8 + $ \ frac {1} {2} $ * a * (0,8) 2
Или 2,1 = 0,64 + 0,32a
Или, a = $ \ frac {{2.1 — 0.64}} {{0.32}} $ = 4.56 м / с 2
Следовательно, ускорение, которое вам нужно, чтобы догнать таракана, равно 4.56 м / с 2 .
35.
Пусть A, B и C представляют положение земли, положение окна и положение наивысшей точки соответственно,
Пусть u представляет начальную скорость футбола. V 1 и V 2 — скорости мяча в точках B и C соответственно,
Или, v 1 2 = u 2 — 2gx.
Или, u 2 = v 1 2 + 2gx
= 5 2 + 2 * 9.2}}} {{2 {\ rm {*}} 9,8}}
долл. США= 13,3 м
(ii) Время, необходимое для достижения максимальной высоты (t) =?
Или, V 2 = u — gt.
Итак, t = $ \ frac {{{\ rm {u}} — {{\ rm {v}} _ 2}}} {{\ rm {g}}}
долларовИтак, t = $ \ frac {{13.3 — 0}} {{9.8}} $ = 1.65 сек.
36.
Мяч, вероятно, застрял в метре или около того над уровнем земли, но мы пренебрегаем этим расстоянием и предполагаем, что он начинается на уровне земли (y o = 0). Начальная скорость мяча имеет составляющую.
В x = В o cosα o = 37cos 53,1 ° = 22,2 м / с
V y = V o sinα o = 37sin 53,1 ° = 29,6 м / с
Мы хотим найти x, y, V x1 и V y1 в момент времени t = 2 секунды, из уравнения.
X = V x t = (22,2) * 2 = 44,4 м
Y = V y t — $ \ frac {1} {2} $ a y t 2 = 29,6 — 9,8 * 2 = 10 м / с
Y — компонента скорости положительна, что означает, что мяч все еще движется вверх в это время.2}} $ = 24,3 м / с
Итак, α = tan -1 $ \ left ({\ frac {{10}} {{22.2}}} \ right) $ = 24,2 °.
37.
Здесь u = 10 м / с
θ = 20 ° горизонтальный удар, h = 8м.
Мы знаем, u x = ucosθ = ucos20 ° = 9,39 м / с
u y = usinθ = 10sin20 ° = 3,42 м / с
Вертикальная скорость мяча, с которым он ударяется о землю, определяется выражением:
V y = U y 2 + 2gh
= (3.42) 2 + 2 * 9,8 * 8
= 11,69 + 56,8
= 168,49
Итак, V y = 12.98м / с
Время, необходимое мячу для достижения земли: t = $ \ frac {{{{\ rm {V}} _ {\ rm {y}}} — {{\ rm {U}} _ {\ rm {y }}}}} {{\ rm {g}}} $ = $ \ frac {{12.98 — 3.42}} {{9.8}} $ = 0.98
Итак, Горизонтальный диапазон R = U x * t
= 9,39 * 0,98
= 9,2 м
Следовательно, мяч ударяется о землю на расстоянии 9,2 м по горизонтали от окна. 2}} $ = 260 км / час.
Угол b V PE с V P определяется по формуле:
Tanθ = $ \ frac {{{{\ rm {V}} _ {\ rm {w}}}}} {{{{\ rm {V}} _ {\ rm {p}}}}} $
Итак, θ = tan -1 $ \ left ({\ frac {{{{{\ rm {V}} _ {\ rm {w}}}}}} {{{{{\ rm {V}} _ { \ rm {p}}}}}} \ right) $
= загар -1 $ \ left ({\ frac {{100}} {{240}}} \ right) $
Итак, θ = 23 ° восточнее севера.
39.
Скорость по оси x, V x = 1,10 м / с.
Время полета t = 0.35 сек.
(i) Пройденная высота h =?
Для вертикального перемещения,
Или, h = ut + $ \ frac {1} {2} $ gt 2
Или, h = 0 + $ \ frac {1} {2} $ gt 2
= $ \ frac {1} {2} $ * 9,8 * (0,35) 2
= 0,6 м
(ii) Горизонтальный диапазон (R) =?
Для горизонтального перемещения
Или, U x = $ \ frac {{\ rm {R}}} {{\ rm {T}}} $
Или, R = U x * T
= 1,10 * 0.