
|
|
|
|
 Far Far |
| WinNavigator |
| Frigate |
| Norton
Commander |
| WinNC |
| Dos
Navigator |
| Servant
Salamander |
| Turbo
Browser |
|
|
| Winamp,
Skins, Plugins |
| Необходимые
Утилиты |
| Текстовые
редакторы |
| Юмор |
|
|

|
File managers and best utilites |
Синхронный реактивный двигатель. Реферат синхронные реактивные двигатели
Синхронный реактивный двигатель
Синхронный реактивный электродвигатель - синхронный электродвигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов [1].Статор реактивного двигателя бывает с распределенной и сосредоточенной обмоткой, и состоит из корпуса и сердечника с обмоткой.

Синхронный реактивный двигатель

Статор синхронного реактивного электродвигателя с распределенной обмоткой
Выделяют три основных типа ротора реактивного двигателя: ротор с явновыраженными полюсами, аксиально-расслоенный ротор и поперечно-расслоенный ротор.

Ротор с явновыраженными полюсами

Аксиально-расслоенный ротор

Поперечно-расслоенный ротор
Переменный ток, проходящий по обмоткам статора, создает вращающееся магнитное поле в воздушном зазоре электродвигателя. Крутящий момент создается, когда ротор пытается установить свою наиболее магнито проводящую ось (d-ось) с приложенным полем, для того чтобы минимизировать магнитное сопротивление в магнитной цепи. Амплитуда момента прямо пропорциональна разницы между продольной Ld и поперечной Lq индуктивностями. Следовательно, чем больше разница, тем больше создаваемый момент.

Линии магнитного поля синхронного реактивного электродвигателя
Главная идея может быть объяснена с помощью рисунка представленного ниже. Объект "a" состоящий из анизотропного материала имеет разную проводимость по оси d и оси q, в то время как изотропный магнитный материал объекта "b" имеет одинаковую проводимость во всех направлениях. Магнитное поле, которое прикладывается к анизотропному объекту "a", создает вращающий момент если существует угол между осью d и линиями магнитного поля. Очевидно, что если ось d объекта "a" не совпадает с линиями магнитного поля, объект будет вносить искажения в магнитное поле. При этом направление искаженных магнитных линий будут совпадать с осью q объекта.
 в магнитном поле")
Объект с анизотропной геометрией (a) и изотропной геометрией (b) в магнитном поле

Силовые линии магнитного поля вокруг объекта с анизотропной геометрией
В синхронном реактивном электродвигателе магнитное поле создается синусоидально распределенной обмоткой статора. Поле вращается с синхронной скоростью и может считаться синусоидальным.
В такой ситуации всегда будет существовать момент направленный на то, чтобы уменьшить полную потенциальную энергию системы, путем уменьшения искажения поля по оси q ( ). Если угол
). Если угол  сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
сохранять постоянным, например путем контроля магнитного поля, тогда электромагнитная энергия будет непрерывно преобразовываться в механическую.
Ток статора отвечает за намагничивание и за создание момента, который пытается уменьшить искаженность поля. Управление моментом осуществляется путем контроля фазы тока, то есть угла между вектором тока обмоток статора и d-осью ротора во вращающейся системе координат.
- Преимущества:
- Простая и надежная конструкция ротора:ротор имеет простую конструкцию, состоящую из тонколистовой электротехнической стали, без магнитов и короткозамкнутой обмотки.
- Низкий нагрев:так как в роторе отсутствуют токи, он не нагревается во время работы, увеличивая срок службы электродвигателя.
- Нет магнитов:снижается конечная цена электродвигателя, так как при производстве не используются редко земельные металлы. При отсутствии магнитных сил упрощается содержание и техническое обслуживание электродвигателя.
- Низкий момент инерции ротора:так как на роторе отсутствует обмотка и магниты, момент инерции ротора ниже, что позволяет электродвигателю быстрее набирать обороты и экономить электроэнергию.
- Возможность регулирования скорости:в виду того, что синхронный реактивный электродвигатель для своей работы требует частотный преобразователь, имеется возможность управления скоростью вращения реактивного двигателя в широком диапазоне скоростей.
- Недостатки:
- Частотное управление:для работы требуется частотный преобразователь.
- Низкий коэффициент мощности:из-за того, что магнитный поток создается только за счет реактивного тока. Решается за счет использования частотного преобразователя с коррекцией мощности.
Смотрите также
engineering-solutions.ru
5. Реактивный синхронный двигатель
В лабораторной практике, в быту и в маломощных механизмах применяют так называемые реактивные синхронные двигатели. От обычных классических машин они отличаются лишь конструкцией ротора. Ротор здесь не является магнитом или электромагнитом, хотя по форме напоминает собой полюсную систему. Принцип действия реактивного синхронного двигателя отличен от рассмотренного выше. Здесь работа двигателя основана, на свободной ориентации ротора таким образом, чтобы обеспечить магнитному потоку статора лучшую магнитную проводимость (рис. 6.4.1).
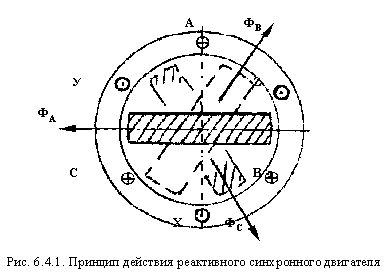
Действительно, если в какой-то момент времени максимальный магнитный поток будет в фазе А - X, то ротор займет положение вдоль потока ФА. Через 1/3 периода максимальным будет поток в фазе В - У. Тогда ротор развернется вдоль потока ФВ. Еще через 1/3 периода произойдет ориентация ротора вдоль потока. ФС. Так непрерывно и синхронно ротор будет вращаться с вращающимся магнитным полем статора. В школьной практике иногда, при отсутствии специальных синхронных двигателей, возникает необходимость в синхронной передаче. Эту проблему можно решить с помощью обычного асинхронного двигателя, если придать ротору следующую геометрическую форму (рис. 6.4.2).

6. Шаговый двигатель
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель. Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.

Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор - двухполюсный. Если подключить к источнику постоянного тока катушки полюсов 1 - 1', то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 - 2', а ка-тушки полюсов 1 - 1' обесточить, то ротор повернется и займет положение вдоль полю-сов 2 - 2'. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 - 3'. Так, шагами, ротор будет "следовать" за своей обмоткой управления. Преимуществом шаговых двигателей является то, что в них совершенно отсутствует "самоход". Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.). Управление шаговыми двигателями ведется с применением различных электронных устройств (триггеров Шмидта и др.).
Лекция 18 (4часа) Машины постоянного тока
7.1. Принцип действия и конструкция
Два неподвижных полюса N и S создают магнитный поток. В пространстве между полюсами помещается стальной сердечник в виде цилиндра (рис. 7.1.1).

На наружной поверхности цилиндра помещен виток медной проволоки abcd, изолированный от сердечника. Концы его присоединены к двум кольцам, на которые наложены щетки 1 и 2. К щеткам подключена нагрузка zн. Если вращать сердечник с частотой n в указанном на рисунке направлении, то виток abcd, вращаясь, будет пересекать магнитные силовые линии, на концах его будет наводиться ЭДС. И если к витку подключена нагрузка zн, то потечет и ток. Направление тока определится правилом "правой руки". Из рисунка видно, что направление тока будет от точек b к а и от d к с. Соответственно во внешней цепи ток течет от щетки 1 к щетке 2. Щетку 1, от которой отводится ток во внешнюю цепь, обозначим (+), а щетку 2, через которую ток возвращается в машину обозначим (-). При повороте витка на 180° проводники аb и cd меняются местами, изменяется знак потенциала на щетках 1 и 2 и изменится на обратное направление ток во внешней цепи. Таким образом, во внешней цепи течет переменный синусоидальный ток (рис. 7.1.2).

Чтобы выпрямить переменный ток, необходимо в машине применить коллектор (рис. 7.1.3).

В простейшем случае это два полукольца и к ним припаиваются концы витков abcd. Полукольца изолирования друг от друга и от вала. При вращении в витке abcd в нем попрежнему возникает переменная ЭДС, но под каждой щеткой будет ЭДС только одного знака: верхняя щетка будет иметь всегда (+), а нижняя - всегда (-). Кривая тока во внешней цепи будет иметь другую форму (рис. 7.1.4).

Из графика видно, что нижняя полуволна заменена верхней. Если применить не один виток, а два и присоединить их концы к коллекторным пластинам, которых теперь 4, то кривая выпрямленного тока будет иной. При наличии нескольких витков кривая выпрямленного напряжения будет более сглаженной (рис. 7.1.5).

Машина постоянного тока конструктивно состоит из неподвижной части - статора и вращающейся - ротора. Статор имеет станину, на внутренней поверхности которой крепятся магнитные полюсы с обмотками (рис. 7.1.6).

Рис. 7.16
Ротор машины чаще называется якорем. Он состоит из вала, цилиндрического сердечника, обмотки и коллектора (рис. 7.1.7).
Магнитные полюсы и сердечник якоря набираются из отдельных листов электротехнической стали. Листы покрываются изолированной бумагой или лаком для уменьшения потерь на гистерезис и вихревые токи. Коллектор набирают из медных пластин, имеющих сложную форму (рис. 7.1.8). Пластины друг от друга изолированы специальной теплостойкой прокладкой. Такая же изоляция имеется между коллектором и валом двигателя. Набор коллекторных пластин образует, цилиндр-коллектор.

Рис. 7.1.8
К внешней поверхности коллектора прилегают токосъемные щетки, которые выполнены из спрессованного медного и угольного порошка. Щетка помещается в металлическую обойму и прижимается к коллектору пружинами (рис. 7.1.9).

studfiles.net
Синхронный двигатель - страница 3
Угол q в синхронном режиме зависит от момента нагрузки на валу двигателя. Угловая характеристика, соответствующая уравнению (3.1), изображена на рис. 3.1. сплошной линией.
В реальных СД с постоянными магнитами магнитная система несимметрична. Активное сопротивление обмотки статора СД небольшой мощности, обычно используемых в САУ, соизмеримо с индуктивными сопротивлениями. Поэтому существенная часть потребляемой мощности теряется на активном сопротивлении обмотки статора.
Оба указанных фактора влияют на значение электромагнитного момента Mс и его зависимость от угла q. Эта зависимость приведена на рис. 3.1. пунктиром.
У СД с постоянными магнитами применяют асинхронный метод пуска. Вращающееся магнитное поле статора во взаимодействии с токами, наведенными в короткозамкнутой обмотке ротора, создает асинхронный момент Mа. Особенность пуска таких двигателей заключается в том., что поток от постоянных магнитов ротора при вращении ротора наводит в обмотках статора э.д.с., частота которой не равна частоте напряжения питания. Под действием э.д.с. в цепи обмоток статора проходят токи, которые во взаимодействии с вызвавшим их потоком ротора создают тормозной момент Mт. Для уменьшения тормозного момента Mт необходимо снижать поток постоянных магнитов ротора.
Оптимальной является такая степень возбуждения ротора, которая обеспечивает наилучшие характеристики в синхронном режиме при заданных пусковых характеристиках.
В мощных СД может использоваться электромагнитное возбуждение ротора. На обмотку ротора через коллектор подается постоянное напряжение, создающее магнитное поле возбуждения ротора. При пуске постоянное напряжение отключается от обмотки ротора, которая на время пуска подключается к сопротивлению. Пусковой момент создается обмоткой типа «беличья клетка».
Такие СД имеют наиболее оптимальные рабочие и пусковые характеристики. Однако они практически не применяются в САУ, где энергетические характеристики не являются решающими. Основные причины этого заключаются в следующем:
1) для работы двигателя необходимы два источника питания: переменного и постоянного тока;
2) скользящий контакт кольца-щетки снижает надежность двигателя и усложняет его конструкцию;
3) требуется специальная пусковая схема, отключающая на период разгона обмотку ротора от источника постоянного тока и подключающая ее к внешнему сопротивлению.
Реактивные синхронные двигатели
Ротор реактивных СД является невозбужденным, но его магнитное сопротивление непостоянно вдоль окружности воздушного зазора.
Принцип действия реактивного СД рассмотрим на статической модели, представленной на рис. 3.2. Вращающееся магнитное поле статора Фd заменим полем постоянного магнита. Угол между продольной осью ротора d и осью магнитного потока Фd обозначим g.
В том случае, когда g =0 (рис. 3.2, а), магнитные силовые линии проходят по пути наименьшего сопротивления и не деформируются. Реактивный вращающий момент Mр=0. Ротор находится в положении устойчивого равновесия. Если принудительно повернуть на угол g по часовой стрелке (рис. 3.2, б), то магнитные силовые линии изогнутся. Деформация магнитного поля вследствие упругих свойств силовых линий вызовет реактивный вращающий момент, стремящийся повернуть ротор против часовой стрелки. Очевидно, что при наличии внешнего момента Mн, ротор установится в такое положение, когда Mр= Mн.
В реальных реактивных СД обмотки статора создают вращающееся магнитное поле, а ротор увлекается реактивным моментом вслед за полем и вращается с угловой скоростью поля.
Важной характеристикой реактивного СД является удельный реактивный момент, который определяется как
при g =0.
Величина удельного момента зависит от формы ротора и величины потока возбуждения в квадрате.
Реактивный СД не имеет собственного пускового момента, поэтому у таких двигателей применяется асинхронный метод пуска. В качестве пусковой обмотки на роторе служит либо обмотка типа «беличья клетка», либо алюминиевые части ротора. Когда скорость wд достигает величины, близкой к синхронной (0,95wс), явнополюсный ротор взаимодействует с полем и втягивается в синхронизм. Ток коротко замкнутой обмотки падает до 0.
Характерной особенностью реактивных СД является нестабильность вращения ротора при постоянстве средней скорости вращения. Мгновенная угловая скорость ротора может колебаться в пределах одного оборота относительно средней скорости (рис. 3.3). Это явление присуще и другим СД и называется качанием ротора. Оно нежелательно, т. к. дает ошибку в положении ротора относительно расчетного, что недопустимо при использовании СД в точных системах передачи угловых перемещений.
Причиной этого явления является нестабильность реактивного момента и момента нагрузки. Существуют внешние и внутренние (конструктивные) причины, приводящие к нестабильности моментов: эллиптичность вращающегося магнитного поля; неравномерность магнитной проводимости по различным осям двигателя; неточная балансировка ротора; тормозные моменты в подшипниках; колебания и несинусоидальность напряжения питания; неравномерность нагрузки на валу двигателя.
К уменьшению амплитуды качаний ротора приводят следующие факторы: увеличение удельного реактивного момента; улучшение технологии изготовления двигателей; использование электрического демпфирования. Так коротко замкнутая пусковая обмотка является одновременно и демпфирующей, т. к. при качаниях ротора относительно поля в ней наводятся токи, создающие момент, препятствующий качаниям ротора.
На рис. 3.4 показаны механическая (а) и регулировочная (б) характеристики реактивного СД. Механическая характеристика горизонтальна вплоть до величины максимального момента Mмакс, при котором двигатель выпадает из синхронизма и останавливается. На рис. 3.4 также показана механическая характеристика для пусковой обмотки (кривая 2).
Регулировочная характеристика линейна и идет из начала координат. Начальный участок показан пунктиром из-за трудности реализации низких угловых скоростей.
Реактивные СД имеют много разновидностей, которые можно разделить на три основные группы: 1) реактивные СД с распределенными обмотками статора; 2) редукторные реактивные СД; 3) реактивные СД с сосредоточенными обмотками статора (будут рассмотрены в разделе «шаговые двигатели»).
Реактивные синхронные двигатели с распределенными обмотками статора. Статор таких двигателей принципиально ничем не отличается от статора обычных синхронных и асинхронных машин. Его задача – создать вращающееся магнитное поле.
Ротор – явнополюсный. На рис. 3.5 изображены конструкции явнополюсных роторов. На рис. 3.5, а, б ротор выполнен из электротехнической стали. В нем находится «беличья клетка» для асинхронного пуска двигателя. Различная магнитная проводимость достигается за счет внешних (рис. 3.5, а) или внутренних пазов (рис. 3.5, б) в магнитном материале. В конструкции на рис. 3.5, в различная магнитная проводимость ротора достигается за счет выполнения его из двух разнородных по магнитным свойствам материалов.
Реактивные СД имеют невысокие энергетические показатели. Для рассматриваемой конструкции к.п.д. лежит в диапазоне от 5% до 40%.
Реактивный редукторный двигатель. Редукторные СД позволяют получить пониженную синхронную скорость вращения при питании от стандартной сети без механического редуктора.
Статор и ротор такого двигателя имеют зубцы, как показано на рис. 3.6. Числа зубцов статора zс и ротора zр различны, причем обычно zр>zс. На статоре уложена обмотка, создающая вращающееся магнитное поле Фс.
Если в данный момент времени поток Фс занимает положение А, то реактивный вращающий момент заставит ротор повернуться в положение наибольшей магнитной проводимости, т.е. напротив статорных зубцов 1 и 4 будут находиться роторные зубцы 1¢ и 5¢. При перемещении потока Фс в положение Б, т.е. на угол 3600/zс, ротор под действием реактивного момента встанет в положение, когда напротив зубцов статора 2 и 5 встанут зубцы ротора 2¢ и 6¢, т.е. ротор повернется на угол 3600/zс-3600/zр.
www.coolreferat.com

|
|
..:::Счетчики:::.. |
|
|
|
|
|
|
|
|