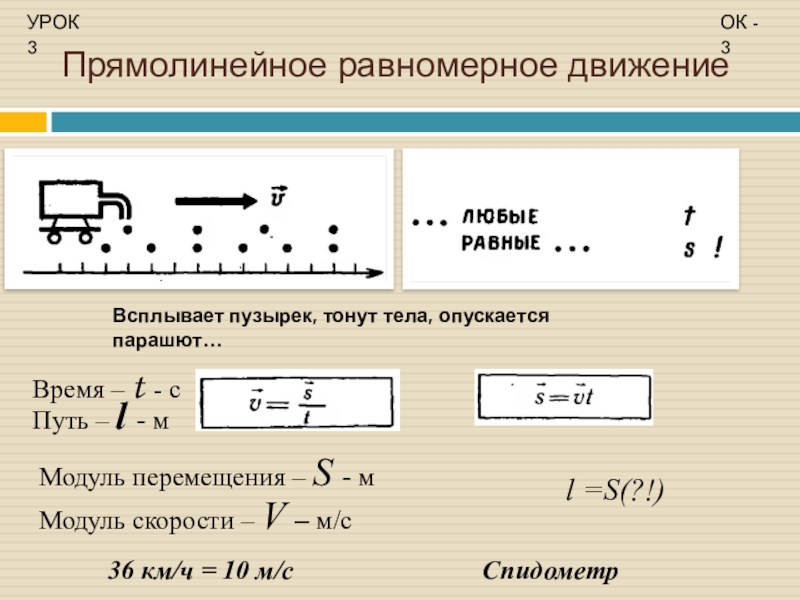
Контрольная работа по физике на тему «Прямолинейное равномерное движение и прямолинейное равноускоренное движение»
Контрольная работа №1 «Прямолинейное равномерное движение» и «Прямолинейное равноускоренное движение»
Вариант 1.
Часть1
1. В каких единицах измеряется ускорение в СИ?
А. км/ч
Б. м/с
В. км/ч2
Г. м/с2
2.Скорость тела, движущегося прямолинейно и равноускоренно, изменилась при перемещении из точки 1 в точку 2 так, как показано на рисунке. Какое направление имеет вектор ускорения на этом участке?
V1 V2
.В.а = 0
Г. Направление может быть любым.
3. По графику зависимости пройденного S,м
пути от времени, определите 15
скорость велосипедиста.
А. 0,2 м/с. Б. 5 м/с. В. 3 м/с. Г. 15 м/с.
5
0 1 2 3t,с
S,м
4.На рисунке, представлены три 1 1
графика зависимости пройденного пути 2
от времени. Какое из тел двигалось
с большей скоростью? 3
А. 2. Б. 1. В. 3.
t,с
0
3.На графике изображена зависимость проекции скорости тела, движущегося вдоль оси ОХ от времени. Какой путь прошло тело к моменту времени t = 10с?
V,м/с А.2м.
Б.26м.
4 В.12м.
2 Г.14м.
0 1 2 3 4 5 6 7 8 9 10 t,с
-2
-4
6. Вертолет равномерно поднимается вертикально вверх. Какова траектория движения точки на конце лопасти винта вертолета в системе отсчета, связанной с корпусом вертолета?
А. . Окружность. Б. Винтовая линия. В. Точка. Г. Прямая
Б. Винтовая линия. В. Точка. Г. Прямая
7.Пловец плывет по течению реки. Чему равна скорость пловца относительно берега реки, если скорость пловца относительно воды 1 м/с, а скорость течения реки 0,5 м/с?
А. 0,5 м/с. Б. 1 м/с. В. 1,5 м/с. Г. 2 м/с.
8. По графику зависимости V
модуля скорости от времени, 15
представленному на рисунке,
определите ускорение 10
прямолинейно движущегося тела
в момент времени t=2с. 5
0 1 2 3 t,с
А. 2 м/с2 В. 5 м/с2.
Б. 3 м/с2. Г. 7,5 м/с.2
9. По условию задания № 8 определите перемещение тела за две секунды.
А. 5 м. Б. 10м. В.20м. Г. 30 м.
10.
A. Sx = 3t2(м). В. Sx = 3t+ 2t2 (м).
Б. Sx =2t+ 3t2 (м). Г. Sx = 3t + t2(м).
11.Автомобиль двигаясь из состояния покоя с ускорением 2м/с2, проходит 100м. Какую скорость он при этом приобретает?
Часть 2
Физическая величинаФормула
А) Перемещения
Б) Скорость
С) Ускорение
(1)
(2)
(3)
v = v0 + at (4)
12.Установите соответствия между физическими величинами и формулами, по которым эти величины определяют
- А
Б
С
Часть 3
3. Движение двух велосипедистов заданы уравнениями х1 =2tи
Движение двух велосипедистов заданы уравнениями х1 =2tи
Найдите время и координату х места встречи велосипедистов. Велосипедисты двигаются вдоль
одной прямой.
14.На взлетной полосе длиной 900 м самолет приобретает скорость 40 м/с. Какую скорость приобретет самолет, пробежав по полосе 225 м?
1 | 2 | 3 | 4 | 5 | |
К – 1 1 вариант | 100 м | 0,4 м\с2 | 1020 м | 0,002 с | 125 м |
К – 1 2 вариант | 500 м | -1 м\с2 | 7 с | 50 с | 1,1 м\с |
К – 2 1 вариант | 1,6 м\с2 | 1,2 Н | -16600 Н | 1410 Н 1590 Н 1500 Н | 2175 Н |
К – 2 2 вариант | 40 Н | 4 м\с2 | 28 м\с | 50 Н 40 Н 60Н | 20 кН |
К – 3 1 вариант | 6см 0,25 с 4 Гц X(t)=0,06Sin8πt | 0,4 с | 1,6 кг | 0,3 Гц | 6,3 м |
К – 3 2 вариант | 15 см 4 с 0,25 Гц X(t)=0,15Cos0,5πt | 0,2 с 5 Гц | 9,8 м\с2 | 3 м\с | В 2,25 раза |
К – 4 1 вариант | 4 м | 10 А | 8·10-15Н | F к нам, Fвправо, Fвправо | 5·10-3Тл |
К – 4 2 вариант | 214 м | 1,2·10-2 Н | 1,6·10-2 Н | Северный полюс внизу, ток от нас, линии магнитной индукции к нам | 0,01 м |
К – 5 1 вариант | электронов-29 нейтронов-34 | уран(235) | 11Н | 0,0407 а. 37,91МэВ | Есв=1,2МэВ Есв=4,35МэВ |
К – 5 2 вариант | протонов-82 нейтронов-125 | Полоний(222) | 1122Na | 0,23524 а.е.м. 219,13МэВ | Есв=5,48МэВ |
 С каким ускорением двигался автомобиль?
С каким ускорением двигался автомобиль? Автомобиль, остановившись перед светофором, набирает затем скорость 54км/ч на пути 50 м. С каким ускорением он должен двигаться? Сколько времени будет длиться этот разбег?
Автомобиль, остановившись перед светофором, набирает затем скорость 54км/ч на пути 50 м. С каким ускорением он должен двигаться? Сколько времени будет длиться этот разбег? Чему равен тормозной путь автомобиля? Каково его ускорение? Чему равна сила торможения?
Чему равен тормозной путь автомобиля? Каково его ускорение? Чему равна сила торможения? Тело массой 5 кг лежит на полу лифта. Определите силу давления тела на пол лифта:
Тело массой 5 кг лежит на полу лифта. Определите силу давления тела на пол лифта: Какова частота ударов волн о корпус лодки.
Какова частота ударов волн о корпус лодки.

 В ядре атома меди 63 частицы, из них 29 протонов. Сколько нейтронов и электронов находится в этом атоме?
В ядре атома меди 63 частицы, из них 29 протонов. Сколько нейтронов и электронов находится в этом атоме? В ядре атома свинца 207 частиц. Вокруг ядра обращается 82 электрона. Сколько нейтронов и протонов в ядре этого атома?
В ядре атома свинца 207 частиц. Вокруг ядра обращается 82 электрона. Сколько нейтронов и протонов в ядре этого атома? е.м.
е.м.
Контрольная работа «Прямолинейное равномерное и равноускоренное движения»
Контрольная работа №1.
«Прямолинейное равномерное и равноускоренное движения»
Вариант 3
Задача 1.
Тело, двигаясь равномерно в начальный момент времени находилось
в точке с координатой 10 м, а через 1 мин от начала движения — в
точке с координатой 130 м. Определите скорость тела и его
перемещение.
Задача 2.
С каким ускорением должен затормозить автомобиль, движущийся
со скоростью 72 км/ч, чтобы через 10 с остановиться?
Задача 3.
За 5 с до финиша скорость велосипедиста равнялась 18 км/ч, а на
финише 36 км/ч. Определите ускорение, с которым двигался
велосипедист. Какой путь он прошел за это время?
Задача 4.
Прямолинейное движение тела описывается уравнением движения
x=10+8t+t
2
. Найдите ускорение тела. Напишите уравнение скорости
данного движения. Найдите координату и скорость через 2 с после
Найдите координату и скорость через 2 с после
начала движения.
Задача 5.
В момент падения на сетку акробат имел скорость 9 м/с. С каким
ускорением происходило торможение, если до полной остановки
акробата сетка прогнулась на 1,5 м? Каково время торможения?
Задача 6.
За седьмую секунду после начала движения автомобиль прошел 5,2
м. С каким ускорением двигался автомобиль? Определите
перемещение автомобиля за вторую секунду после начала движения.
Контрольная работа №1.
«Прямолинейное равномерное и равноускоренное движения»
Вариант 4
Задача 1.
Автомобиль, двигаясь равномерно со скоростью 90 км/ч, проехал за
15 с такой же путь, какой преодолел мотоциклист за 20 с. Чему равна
скорость мотоциклиста? Считать движение мотоциклиста так же
равномерным.
Задача 2.
Определите, какую скорость развивает мотоциклист за 15 с, двигаясь
из состояния покоя с ускорением 1,3 м/с2?
Задача 3.
Определите ускорение автомобиля, если он увеличивает скорость с
54 км/ч до 72 км/ч за 5 с. Какой путь он за это время проходит?
Задача 4.
Уравнение движения тела дано в виде x=15t+0.4t
2
. Определите
начальную скорость и ускорение движения тела, а также координату
и скорость через 5 с после начала движения. Напишите уравнение
скорости данного движения.
Задача 5.
Пуля, летящая со скоростью 400 м/с, ударяется в земляной вал и
проникает в него на глубину 40 см. С каким ускорением и сколько
времени двигалась пул внутри вала?
Задача 6.
С каким ускорение движется тело, если за пятую секунду оно прошло
18 м? Определите перемещение тела за восьмую секунду после
начала движения.
Контрольная работа №1 Прямолинейное равномерное и равноускоренное движение
Кинематика
Кодификатор
элементов содержания и требований к уровню подготовки обучающихся для проведения контрольной работы по физике по теме «Прямолинейное равномерное и равноускоренное движение» в 9 классе
Предмет: «физика»9 класс
Учебник для общеобразовательных
учреждений под редакцией А.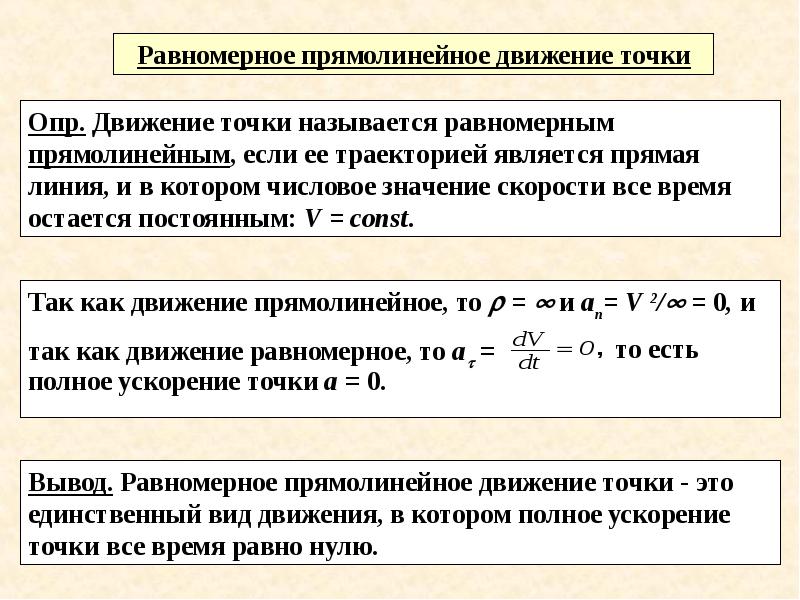 В. Пёрышкина, Е.М. Гутника Вид контроля: текущий
(тематический)
В. Пёрышкина, Е.М. Гутника Вид контроля: текущий
(тематический)
Тема: «Прямолинейное равномерное и равноускоренное движение»
1. Перечень элементов предметного содержания, проверяемых на контрольной работе
Номер задания | Описание элементов предметного содержания |
А1, А6 | Механическое движение. Траектория. Путь. Перемещение |
А2, А3, С9 | Равномерное прямолинейное движение |
А2, | Скорость |
А4, А5 | Ускорение |
А4, А5, В7, С8 | Равноускоренное прямолинейное движение |
2. Перечень
элементов метапредметного содержания, проверяемых на контрольной работе
Перечень
элементов метапредметного содержания, проверяемых на контрольной работе
Номер задания | Описание элементов метапредметного содержания |
А1 | Умение определять понятия (познавательное УУД) |
В7 | Умение классифицировать (познавательное УУД) |
А2, А3, А4, А6, С8, С9 |
Умение устанавливать причинно-следственные связи (познавательное УУД) |
А2, А3, А4, А5, А6, С8, С9 |
Умение строить логические рассуждения, умозаключения и делать выводы |
Работа | Умение оценивать правильность выполнения учебной задачи (регулятивное УУД) |
3. Перечень
требований к уровню подготовки обучающихся, освоивших тему
Перечень
требований к уровню подготовки обучающихся, освоивших тему
Номер задания | Описание требований к уровню подготовки обучающихся |
А1 | Знание и понимание смысла физических величин: путь, скорость, ускорение, перемещение |
А2, А3, А4, А5, С8, С9 | Умение описывать и объяснять физические явления: равномерное прямолинейное движение, равноускоренное прямолинейное движение |
А3 | Умение проводить анализ данных, в том числе выраженных в виде таблицы или графика |
А5 | Умение выражать результаты измерений и расчетов в единицах |
| Международной системы |
А2, А4, А5, А6, С8, С9 | Решение физических задач |
А1 | Понимание смысла использованных в заданиях физических терминов |
В7 | Умение переводить информацию из одной знаковой системы в другую |
Спецификация КИМ
для проведения контрольной работы по теме
Назначение контрольной работы:
оценить уровень освоения учащимися 9 класса содержания темы «Кинематика».
Содержание контрольных измерительных заданий определяется содержанием рабочей программы по теме «Кинематика» учебного предмета «физика», а также содержанием темы «Кинематика» учебника для общеобразовательных учреждений под редакцией А.В Пёрышкина, Е.М. Гутника.
Контрольная работа состоит из 9 заданий: 7- задания базового уровня, 1 — повышенного.
Распределение заданий по уровням сложности,
проверяемым элементам предметного, метапредметного содержания, уровню подготовки, типам заданий и времени выполнения
№ задания |
уровень |
Тип задания | Примерное время выполнения задания |
А1 | Базовый | Тест с выбором ответа | 1 мин |
А2 | Базовый | Тест с выбором ответа | 2 мин |
А3 | Базовый | Тест с выбором ответа | 1 мин |
А4 | Базовый | Тест с выбором ответа | 3 мин |
А5 | Базовый | Тест с выбором ответа | 5 мин |
А6 | Базовый | Тест с выбором ответа | 5 мин |
В7 |
Базовый | Задание на соответствие, множественный выбор |
5 мин |
С8 | Повышенный | Расчётная задача с развёрнутым решением | 10 мин |
С9 | Повышенный | Расчётная задача с развёрнутым решением | 8 мин |
На выполнение 9 заданий отводится 40 минут. Контрольная
работа составлена в 2-х вариантах.
Контрольная
работа составлена в 2-х вариантах.
Каждому учащемуся предоставляется распечатка заданий.
Задания в контрольной работе оцениваются в зависимости от сложности задания разным
количеством баллов, указанных в таблице.
Баллы | Отметка |
14-12 | 5 |
11 — 10 | 4 |
9 — 6 | 3 |
меньше 6 | 2 |
№ задания |
| Количество баллов |
1 — 6 |
| 1 балл – правильный ответ 0 баллов – неправильный ответ |
7 |
| Максимальное количество баллов -2 Правильно распределено 3 понятия — 2 балла Правильно распределено 2 понятия — 1 балл Правильно распределено 1понятие — 0 баллов |
8, 9 | Если: − − − − − − Если: − − − − | Максимальное количество баллов – 3 полностью записано условие, содержатся пояснения решения, записаны формулы, записан перевод единиц измерения в СИ, вычисления выполнены верно, записан подробный ответ – 3 балла записано условие, отсутствуют пояснения решения, записаны формулы, не записан перевод единиц измерения в СИ, |
| − | вычисления выполнены верно, |
| − | записан ответ – 2 балла |
| Если: − | записано условие, |
| − | отсутствуют пояснения решения, |
| − | записаны формулы, |
| − | не записан перевод единиц измерения в СИ, |
| − | содержится вычислительная ошибка, не искажающая грубо результат, |
| − Если х | записан ответ – 1 балл од решения не верный, но присутствует правильный ответ – 0 баллов |
Оценка правильности выполнения задания | Оценка правильности
выполнения задания (регулятивное УУД): после проверки работы учителем
попросить проверить — учащихся свои работы, сверяя их с эталоном ответов
(умение оценивать правильность выполнения учебной задачи). Данное задание оценивается, но в баллы и отметку не переводится. | |
Итого | 14 баллов | |
 Соотнести с
отметкой учителя, прокомментировать результат выполнения задания.
Соотнести с
отметкой учителя, прокомментировать результат выполнения задания.
Перевод баллов к 5-балльной отметке
1. Исследуется перемещение слона и мухи. Модель материальной точки может использоваться для описания движения
1) только слона 2) только мухи 3) и слона, и мухи в разных исследованиях 4) ни слона, ни мухи, поскольку это живые существа 2. Вертолет Ми-8 достигает скорости 250 км/ч. Какое время он затратит на перелет между двумя населенными пунктами, расположенными на расстоянии 100 км? 1) 0,25с 2) 0,4с 3) 2,5с 4) 1440с
3. На рисунках представлены
графики зависимости координаты от времени для четырех тел, движущихся вдоль оси
ОХ. Какое из тел движется с наибольшей по модулю скоростью?
Какое из тел движется с наибольшей по модулю скоростью?
4. Велосипедист съезжает с горки, двигаясь прямолинейно и равноускоренно. За время спуска скорость велосипедиста увеличилась на 10 м/с. Ускорение велосипедиста 0,5 м/с2. Сколько времени длится спуск?
1) 0,05с 2) 2 с 3) 5 с 4) 20 с
5. Лыжник съехал с горки за 6 с, двигаясь с постоянным ускорением 0,5 м/с2. Определите длину горки, если известно, что в начале спуска скорость лыжника была равна 18 км/ч.
1) 39 м 2) 108 м 3) 117 м 4) 300 м
6. Моторная лодка движется по течению реки со скоростью 5 м/с относительно берега, а в стоячей воде — со скоростью 3 м/с. Чему равна скорость течения реки?
1) 1 м/с 2) 1,5 м/с 3) 2 м/с 4) 3,5 м/с
Уровень В
7. Установите соответствие между физическими величинами и
формулами, по которым эти величины определяются. К каждой позиции первого
столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
Установите соответствие между физическими величинами и
формулами, по которым эти величины определяются. К каждой позиции первого
столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
А) Ускорение 1) + 𝑎𝑥𝑡
Б) Скорость при равномерном 2)
𝑡 прямолинейном движении 3)
В) Проекция перемещения при 4)𝑉⃗ равноускоренном прямолинейном 5) 𝑡 𝑎 𝑡 движении 𝑥
Уровень С
8. На пути 60 м скорость тела уменьшилась в 3 раза за 20 с.
Определите скорость тела в конце пути, считая ускорение постоянным.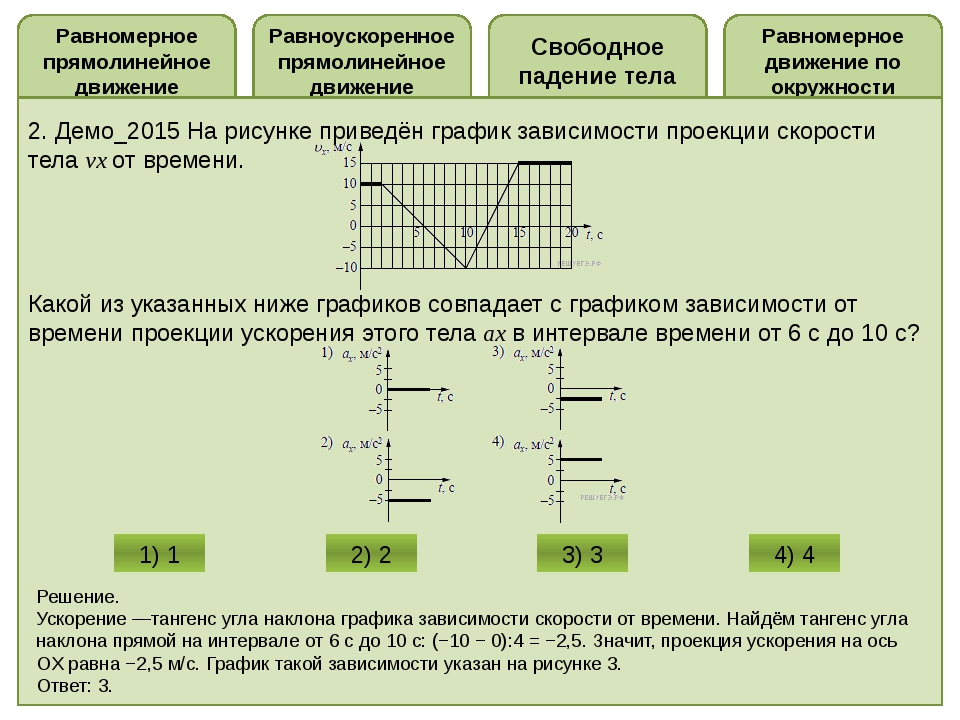
9. Из населенных пунктов А и В, расположенных вдоль шоссе на расстоянии 3 км друг от друга, в одном направлении одновременно начали движение велосипедист и пешеход. Велосипедист движется из пункта А со скоростью 15 км/ч, а пешеход со скоростью 5 км/ч. Определите, на каком расстоянии от пункта А велосипедист догонит пешехода.
Контрольная работа «Кинематика» Вариант 2.
1. Два тела, брошенные с поверхности земли вертикально вверх, достигли высот 10 м и 20 м и упали на землю. Пути, пройденные этими телами, отличаются на
1) 5 м 2) 20 м 3) 10 м 4) 4 м
2. За 6 минут равномерного движения мотоциклист проехал 3,6 км. Скорость мотоциклиста равна
1) 0,6 м/с 2) 10 м/с 3) 15 м/с 4) 600 м/с 3. На рисунках представлены графики зависимости проекции перемещения от времени для четырех тел. Какое из тел движется с наибольшей по модулю скоростью?
4. Во время подъема в гору
скорость велосипедиста, двигающегося прямолинейно и равноускоренно, изменилась
за 8 с от 18 км/ч до 10,8 км/ч. При этом
Во время подъема в гору
скорость велосипедиста, двигающегося прямолинейно и равноускоренно, изменилась
за 8 с от 18 км/ч до 10,8 км/ч. При этом
ускорение велосипедиста было равно
1) — 0,25 м/с2 2) 0,25 м/с2 3) — 0,9 м/с2 4)
0,9 м/с2
5. Аварийное торможение автомобиля происходило в течение 4 с. Определите, каким был тормозной путь, если начальная скорость автомобиля 90 км/ч.
1) 22,5 м 2) 45 м 3) 50 м 4) 360 м
6. Пловец плывет по течению реки. Определите скорость пловца относительно берега, если скорость пловца относительно воды 0,4 м/с, а скорость течения реки 0,3 м/с.
1) 0,5 м/с 2) 0,1 м/с 3) 0,5 м/с 4) 0,7 м/с
Уровень В 7. Установите соответствие между физическими величинами и их единицами
измерения в СИ. К каждой позиции первого столбца подберите соответствующую
позицию второго и запишите в таблицу выбранные цифры под
соответствующими буквами.
К каждой позиции первого столбца подберите соответствующую
позицию второго и запишите в таблицу выбранные цифры под
соответствующими буквами.
А) скорость Б) ускорение В) время | 1) мин 2) км/ч 3) м/с 4) с 5) м/с2 |
8. Поезд начинает равноускоренное движение из состояния покоя и проходит за четвертую секунду 7 м. Какой путь пройдет тело за первые 10 с?
9. Катер, переправляясь через реку шириной 800 м, двигался
перпендикулярно течению реки со скоростью 4 м/с в системе отсчета, связанной с
водой. На сколько будет снесен катер течением, если скорость течения реки 1,5
м/с?
На сколько будет снесен катер течением, если скорость течения реки 1,5
м/с?
Контрольная работа по физике Прямолинейное движение 10 класс
Контрольная работа по физике Прямолинейное движение 10 класс с ответами. Контрольная работа включает 4 варианта, в каждом варианте по 9 заданий.
1 вариант
1. Сколько времени пассажир, сидящий у окна поезда, идущего со скоростью 54 км/ч, будет видеть проходящий мимо него встречный поезд, скорость которого 36 км/ч? Длина поезда 250 м.
2. Автомобиль движется со скорость 72 км/ч. Определите ускорение автомобиля, если через 20 с он остановится.
3. За какое время автомобиль, двигаясь из состояния покоя с ускорением 0,6 м/с2, пройдет 30 м?
4. Теплоход проходит расстояние между двумя городами вверх по течению реки за 80 ч, а вниз по течению за 60 ч. Определите время, за которое расстояние между городами проплывет плот.
5. При взлете самолет за 40 с приобретает скорость 300 км/ч. Какова длина взлетной полосы?
При взлете самолет за 40 с приобретает скорость 300 км/ч. Какова длина взлетной полосы?
6. Определите начальную скорость тела, которое, двигаясь с ускорением 2 м/с2, за 5 с проходит путь, равный 125 м.
7. Эскалатор метро поднимает неподвижно стоящего на нем пассажира за 1 мин. По неподвижному эскалатору пассажир поднимается за 3 мин. Сколько времени будет подниматься идущий пассажир по движущемуся эскалатору?
8. Мяч, скатываясь с наклонной плоскости из состояния покоя, за первую секунду прошел путь 15 см. Определите путь, пройденный мячом за 2 с.
9. Тело движется равномерно со скоростью 3 м/с в течение 20 с, затем в течение 15 с движется с ускорением 0,2 м/с2 и останавливается. Найдите путь, пройденный телом за все время движения.
2 вариант
1. Одновременно из пунктов А и В, расстояние между которыми равно 250 км, навстречу друг другу выехали два автомобиля. Определите, через какое время встретятся автомобили, если их скорости соответственно равны 60 км/ч и 40 км/ч.
Определите, через какое время встретятся автомобили, если их скорости соответственно равны 60 км/ч и 40 км/ч.
2. Троллейбус трогается с места с ускорением 1,2 м/с2. Какую скорость приобретает троллейбус за 10 с?
3. Рассчитайте ускорение поезда, движущегося со скоростью 18 км/ч, если он, начав торможение, останавливается в течение 10 с.
4. Катер переправляется через реку. Скорость течения равна 3 м/с, скорость катера в стоячей воде — 6 м/с. Определите угол между векторами скорости катера относительно воды и скорости течения, если катер переплывает реку по кратчайшему пути.
5. Автомобиль, движущийся со скоростью 36 км/ч, начинает тормозить и останавливается через 2 с. Каков тормозной путь автомобиля?
6. Чему равно ускорение пули, которая, пробив стену толщиной 35 см, уменьшила свою скорость с 800 до 400 м/с?
7. Первую треть пути велосипедист ехал со скоростью 15 км/ч.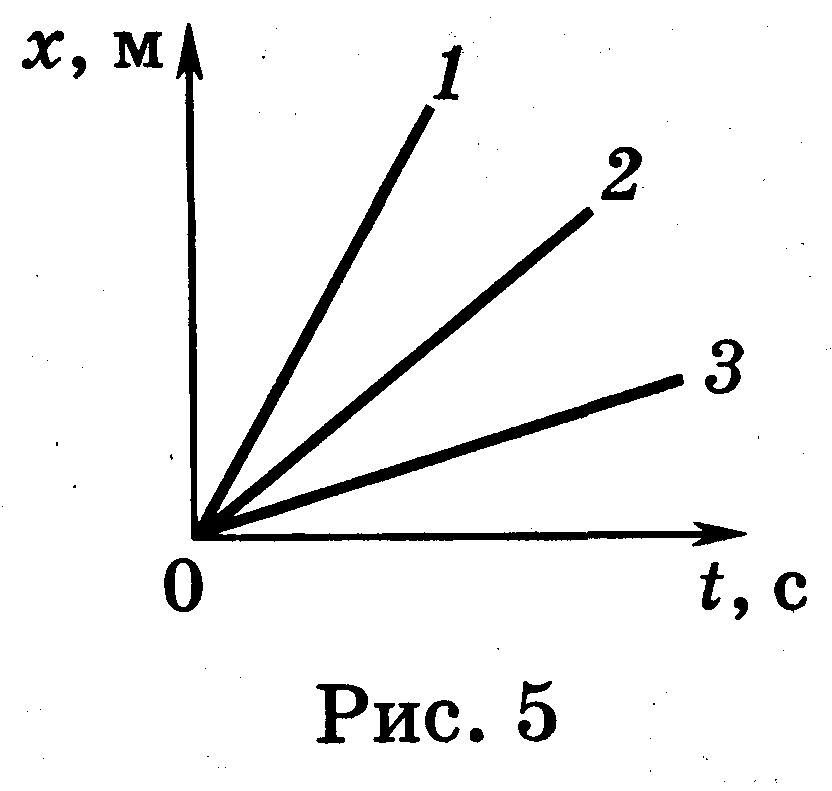 Средняя скорость велосипедиста на всем пути равна 20 км/ч. С какой скоростью он ехал оставшуюся часть пути?
Средняя скорость велосипедиста на всем пути равна 20 км/ч. С какой скоростью он ехал оставшуюся часть пути?
8. Двигаясь из состояния покоя, автомобиль за первые 5 с проходит 25 м. Рассчитайте путь, пройденный автомобилем за десятую секунду после начала движения.
9. При остановке автобус за последнюю секунду проехал половину тормозного пути. Каково полное время торможения автобуса?
3 вариант
1. Пассажир поезда, идущего со скоростью 15 м/с, видит в окне встречный поезд длиной 150 м в течение 6 с. Какова скорость встречного поезда?
2. Автомобиль при разгоне за 10 с приобретает скорость 54 км/ч. Каково при этом ускорение автомобиля?
3. Определите время, за которое ракета приобретает первую космическую скорость 7 ,9 км/с, если она движется с ускорением 50 м/с2.
4. За 1, 5 ч моторная лодка проходит против течения расстояние 18 км. За какое время она пройдет обратный путь, если скорость течения равна 3 км/ч?
За какое время она пройдет обратный путь, если скорость течения равна 3 км/ч?
5. С каким ускорением двигался поезд до остановки, если в начале торможения он имел скорость 36 км/ч, а его тормозной путь равен 100 м?
6. Пройдя от станции расстояние 1,5 км, поезд развил скорость 54 км/ч. Каково время разгона поезда?
7. Катер, плывущий вниз по реке, догоняет спасательный круг. Через 30 мин после этого катер поворачивает назад и снова встречает круг на расстоянии 5 км от места первой встречи. Найдите скорость течения реки.
8. Начав движение из состояния покоя с ускорением 6 м/с2, тело достигло скорости 36 м/с и, продолжая движение, остановилось через 5 с. Какой путь прошло тело за все время движения?
9. Найдите время, необходимое мотоциклисту для полной остановки, если за 3 с он проехал половину тормозного пути.
4 вариант
1. Из двух городов, расстояние между которыми равно 120 км, одновременно навстречу друг другу выехали два автобуса, скорости которых постоянны и равны соответственно 20 км/ч и 60 км/ч.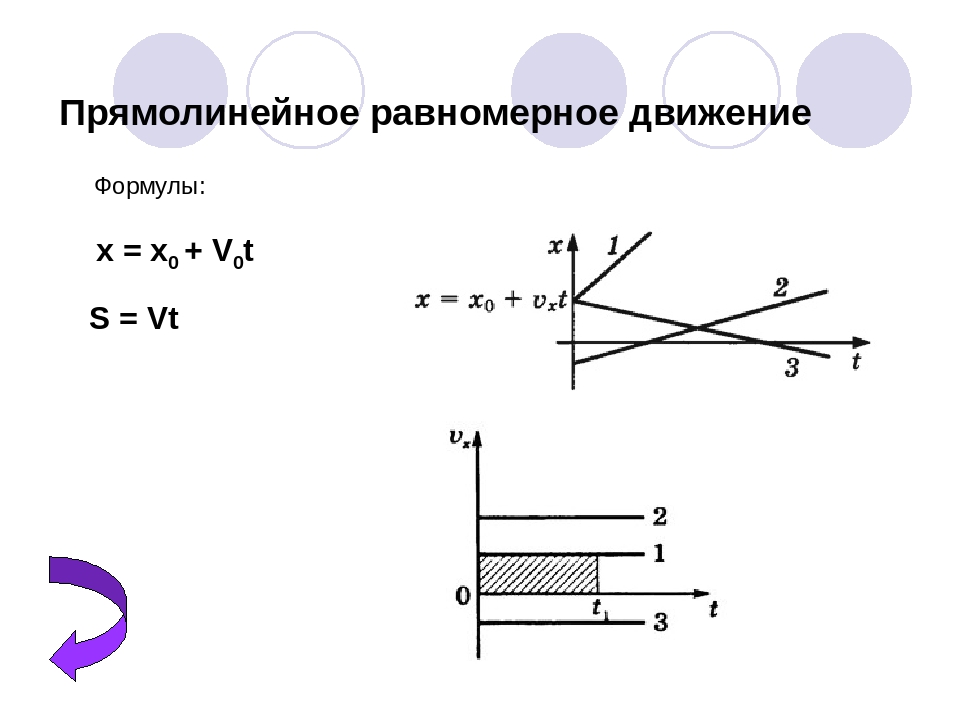 Через какое время встретятся автобусы?
Через какое время встретятся автобусы?
2. Определите время, за которое трамвай развивает скорость 36 км/ч, трогаясь с места с ускорением 0,2 м/с2.
3. Велосипедист, движущийся со скоростью 3 м/с, начинает спускаться с горы с ускорением 0,8 м/с2. Найдите длину горы, если спуск занял 6 с.
4. Моторная лодка проходит расстояние между двумя пунктами по течению реки за 3 ч, а плот — за 12 ч. Сколько времени моторная лодка затратит на обратный путь?
5. Определите время, за которое троллейбус, двигаясь из состояния покоя, на пути 500 м приобрел скорость 54 км/ч.
6. Двигаясь от остановки, тело достигло скорости 50 м/с, пройдя путь 50 м. Чему равно ускорение, с которым двигалось тело?
7. Скорость поезда на подъеме равна 30 км/ч, а на спуске — 90 км/ч. Определите среднюю скорость на всем участке пути, если спуск в 2 раза длиннее подъема.
8. За последнюю (пятую) секунду равнозамедленного движения тело проходит 5 ми останавливается. Чему равен путь, пройденный телом за третью секунду?
9. Расстояние 1,8 км между двумя станциями метро поезд проходит со средней скоростью 54 км/ч. На участке разгона он движется равноускоренно в течение 40 с, затем едет равномерно, после чего равнозамедленно в течение 20 с до полной остановки. Определите наибольшую скорость поезда.
ОТВЕТЫ — Контрольная работа по физике Прямолинейное движение 10 класс
1 вариант
1. 10 с
2. 1 м/с2
3. 10 с
4. 20 сут
5. 1667 м
6. 20 м/с
7. 45 с
8. 0,6 м
9. 82,5 м
2 вариант
1. 2,5 ч
2. 12 м/с
3. 0,5 м/с2
4. 120°
5. 10 м
6. 7 · 105м/с2
7. 24 км/ч
8. 19 м
9. 1,41 с
3 вариант
1. 10 /с
2. 1,5 м/с2
3. 158 с
158 с
4. 1ч
5. 0,5 м/с2
6. 200 с
7. 5 км/ч
8. 198 м
9. 10 с
4 вариант
1. 1,5 ч
2. 50 с
3. 32,4 м
4. 6 ч
5. 67 с
6. 25 м/с2
7. 54 км/ч
8. 25 м
9. 20 м/с
контрольная работа по физике 7 класс «Прямолинейное равномерное движение» | План-конспект урока по физике (7 класс) на тему:
Контрольная работа №1 «Прямолинейное равномерное движение»
Вариант 1.
1. Даны законы движения двух точечных тел:
а) х = 3+5t;
б) х = 7-t, где х – координата в м, t – время в с.
Определите координаты тел в моменты времени t = 1 с.
Определите моменты времени, когда координата тел х = 4 м.
2. На рисунке приведены графики движения пешехода (1), собаки (2) и велосипедиста (3).
Заполните в соответствии с рисунком таблицу.
тело | Начальная координата, м | Координата (м) в момент t=4с | Скорость м/с | Закон движения |
Пешеход | ||||
Собака | ||||
Велосипедист |
3. Автобус за 3 часа проехал в положительном направлении оси Х (на восток) 100 км. После этого он развернулся и проехал в обратном направлении 20 км за 1 час. Найдите:
Автобус за 3 часа проехал в положительном направлении оси Х (на восток) 100 км. После этого он развернулся и проехал в обратном направлении 20 км за 1 час. Найдите:
а) путь S, пройденный автобусом за все время движения;
б) модуль | ∆x| и направление вектора перемещения за все время движения. Выполните соответствующий рисунок.
Контрольная работа №1 «Прямолинейное равномерное движение»
Вариант 2.
1. Даны законы движения двух точечных тел:
а) х = 4+2t;
б) х = 10-2t, где х – координата в м, t – время в с.
Определите координаты тел в моменты времени t = 3 с.
Определите моменты времени, когда координата тел х = 5 м.
2. На рисунке приведены графики движения стрекозы (1), червяка (2) и мухи (3).
Заполните в соответствии с рисунком таблицу.
тело | Начальная координата, м | Координата (м) в момент t=4с | Скорость м/с | Закон движения |
Стрекоза | ||||
Червяк | ||||
Муха |
3. Автомобильс за 3 часа проехал в положительном направлении оси Х (на север) 90 км. После этого он развернулся и проехал в обратном направлении 30 км за 1 час. Найдите:
Автомобильс за 3 часа проехал в положительном направлении оси Х (на север) 90 км. После этого он развернулся и проехал в обратном направлении 30 км за 1 час. Найдите:
а) путь S, пройденный автомобилем за все время движения;
б) модуль | ∆x| и направление вектора перемещения за все время движения. Выполните соответствующий рисунок.
Контрольная работа по физике 9 класс «Равноускоренное движение»
Равноускоренным движением называют движение, при котором. 1) тело за равные промежутки времени проходит равные расстояния 2) скорость тела за разные промежутки времени изменяется на одинаковые значения 3) скорость тела за равные промежутки времени изменяется на одинаковые значения 4) скорость тела не изменяется. .
Просмотр содержимого документа
«Контрольная работа по физике 9 класс «Равноускоренное движение»»
Контрольная работа
«Равномерное и равноускоренное движение» 9 класс
Уравнение движения тела дано в виде x = 3 − 3t.
 Определи:
Определи:
1) начальную координату тела: x0 = _____ м
2) скорость движения: vx = _____ м/с;
3) проекцию перемещения тела за 6 секунд: Sx = _____ м.
Автомобиль едет со скоростью 20 м/с, а автобус со скоростью 60 км/ч. Сравните скорости этих тел
У автобуса скорость больше,
У автомобиля скорость больше,
Скорости автобуса и автомобиля равны
Среди предложенных ответов нет правильного
Скорость тела задана уравнением υ=4+2t. Определите начальную скорость и ускорение тела.
Ʋ0= 4 м/с; а=2 м/с2
Ʋ0= 2 м/с; а=4 м/с2
Ʋ0= 4 м/с; а=-2 м/с2
Ʋ0= 2 м/с; а=2 м/с2
На рисунке представлен график зависимости скорости от времени для тела, движущегося прямолинейно.
 Путь равномерного движения тела составляет
Путь равномерного движения тела составляет
40 м
120 м
160 м
240 м
Через 25 с после начала движения спидометр автомобиля показал скорость движения 36 км/ч. С каким ускорением двигался автомобиль?
Самолет для взлета должен приобрести скорость 240 км/ч. Какой должна быть длина взлетной полосы, если известно, что время разгона самолета равно 30 с?
На рисунке показан график зависимости скорости тела от времени.
график зависимости скорости тела от времени
На рисунке показан график зависимости скорости тела от времени.
Тело
1) движется равномерно
2) движется равнозамедленно
3) движется равноускоренно
4) покоится
8. Мотоцикл «Yamaha R1» разгоняется с места до 200 км/ч за 8,6 с. Величина ускорения мотоцикла равна
1) 55,5 м/с2
2) 6,5 м/с2
3) 13 м/с2
4) 23,3 м/с2
9. Поезд двигался из начала координат равномерно со скоростью 36 км/ч, после чего в точке с координатой 1500 м начал двигаться с ускорением 0,01 м/с2 в течении 30 минут. С начала движения поезд прошёл путь, равный
Поезд двигался из начала координат равномерно со скоростью 36 км/ч, после чего в точке с координатой 1500 м начал двигаться с ускорением 0,01 м/с2 в течении 30 минут. С начала движения поезд прошёл путь, равный
1) 18 км
2) 34,2 км
3) 35,7 км
4) 16,2 км
10. Определите, какие из величин правого столбца обозначают векторную физическую величину, а какие скалярную
А) Векторная величина
Б) Скалярная величина
1) Движение
2) Время
3) Ускорение
4) Секунда
5) Метр
4.4 Равномерное круговое движение — Университетская физика, том 1
Цели обучения
К концу этого раздела вы сможете:
- Найдите центростремительное ускорение объекта, движущегося по круговой траектории.
- Используйте уравнения кругового движения, чтобы найти положение, скорость и ускорение частицы, совершающей круговое движение.
- Объясните разницу между центростремительным ускорением и тангенциальным ускорением, возникающим в результате неравномерного кругового движения.
- Оцените центростремительное и тангенциальное ускорение при неравномерном круговом движении и найдите вектор полного ускорения.
Равномерное круговое движение — это особый тип движения, при котором объект движется по кругу с постоянной скоростью. Например, любая точка пропеллера, вращающегося с постоянной скоростью, совершает равномерное круговое движение. Другими примерами являются секундная, минутная и часовая стрелки часов. Примечательно, что точки на этих вращающихся объектах действительно ускоряются, хотя скорость вращения постоянна.Чтобы увидеть это, мы должны проанализировать движение в терминах векторов.
Центростремительное ускорение
В одномерной кинематике объекты с постоянной скоростью имеют нулевое ускорение. Однако в двух- и трехмерной кинематике, даже если скорость постоянна, частица может иметь ускорение, если она движется по криволинейной траектории, такой как окружность. В этом случае вектор скорости меняется, или
В этом случае вектор скорости меняется, или
Это показано на (Рисунок). Поскольку частица движется против часовой стрелки во времени
по круговой траектории, его вектор положения перемещается из
Спо
Вектор скорости имеет постоянную величину и касается пути, поскольку он изменяется от
. Спо
только меняет направление.Поскольку вектор скорости
перпендикулярно вектору положения
треугольников, образованных векторами положения и
и векторы скорости и
похожи. Кроме того, с
и
два равнобедренных треугольника. Из этих фактов мы можем сделать утверждение
или
Рисунок 4.18 (a) Частица движется по кругу с постоянной скоростью, временами имея векторы положения и скорости.и
(b) Векторы скорости, образующие треугольник. Два треугольника на рисунке похожи. Вектор
Два треугольника на рисунке похожи. Вектор
указывает на центр круга в пределах
Мы можем найти величину ускорения от
Направление ускорения также можно найти, отметив, что как
и, следовательно,
приближаются к нулю, вектор
приближается к направлению, перпендикулярному
В пределе
перпендикулярно
с
касается окружности, ускорение
указывает на центр круга.Таким образом, частица, движущаяся по кругу с постоянной скоростью, имеет ускорение с величиной
.Направление вектора ускорения — к центру круга ((Рисунок)). Это радиальное ускорение и называется центростремительным ускорением , поэтому мы даем ему индекс c. Слово центростремительный происходит от латинских слов centrum (что означает «центр») и petere (что означает искать ») и, таким образом, принимает значение« поиск центра ».”
Рис. 4.19. Вектор центростремительного ускорения указывает на центр круговой траектории движения и представляет собой ускорение в радиальном направлении. Также показан вектор скорости, касающийся окружности.Давайте рассмотрим несколько примеров, которые иллюстрируют относительные величины скорости, радиуса и центростремительного ускорения.
Пример
Создание ускорения 1
гСамолет летит со скоростью 134,1 м / с по прямой и делает разворот по круговой траектории на уровне земли.Каким должен быть радиус окружности, чтобы вызвать центростремительное ускорение 1 g на пилоте и самолете по направлению к центру круговой траектории?
Стратегия
Учитывая скорость струи, мы можем найти радиус окружности в выражении для центростремительного ускорения.
Решение
Установите центростремительное ускорение равным ускорению свободного падения:
Решая для радиуса, находим
Значение
Чтобы создать у пилота большее ускорение, чем g , реактивный самолет должен либо уменьшить радиус своей круговой траектории, либо увеличить скорость на существующей траектории, либо и то, и другое.
Проверьте свое понимание
Радиус маховика 20,0 см. Какова скорость точки на краю маховика, если она испытывает центростремительное ускорение
?[показывать-ответ q = ”fs-id116516
09 ″] Показать решение [/ показывать-ответ][скрытый-ответ a = ”fs-id116516
09 ″]134,0 см / с
[/ hidden-answer]
Центростремительное ускорение может иметь широкий диапазон значений в зависимости от скорости и радиуса кривизны круговой траектории.Типичные центростремительные ускорения приведены в следующей таблице.
| Объект | Центростремительное ускорение (м / с 2 или коэффициент г ) |
|---|---|
| Земля вокруг Солнца | |
| Луна вокруг Земли | |
| Спутник на геостационарной орбите | 0.233 |
| Внешний край компакт-диска при воспроизведении | |
| Струя в бочке ролика | (2–3 г ) |
| Американские горки | (5 г ) |
| Электрон, вращающийся вокруг протона в простой модели атома Бора |
Уравнения движения для равномерного кругового движения
Частица, совершающая круговое движение, может быть описана ее вектором положения
(рисунок) показывает частицу, совершающую круговое движение против часовой стрелки.Когда частица движется по окружности, ее вектор положения выметает угол
с осью x- . Вектор
образующий угол
с осью x- показан с его компонентами вдоль осей x и y . Величина вектора положения
., а также радиус круга, так что с точки зрения его составляющих
Здесь,
— это постоянная, называемая угловой частотой частицы, .Угловая частота измеряется в радианах (рад) в секунду и представляет собой просто количество радианов угловой меры, через которую проходит частица за секунду. Угол
, который имеет вектор положения в любой конкретный момент времени, равен
..
Если T — это период движения или время для завершения одного оборота (
рад), затем
Рис. 4.20. Вектор положения частицы, движущейся по кругу, с ее компонентами по осям x и y.Частица движется против часовой стрелки. Угол— угловая частота
в радианах в секунду, умноженное на t.
Скорость и ускорение можно получить из функции положения путем дифференцирования:
Из (Рисунок) видно, что вектор скорости тангенциальный к окружности в месте нахождения частицы с величиной
.Аналогично, вектор ускорения находится путем дифференцирования скорости:
Из этого уравнения мы видим, что вектор ускорения имеет величину
.и направлен против вектора положения, к началу координат, потому что
Пример
Круговое движение протона
Протон имеет скорость
и движется по окружности в плоскости xy радиуса r = 0.175 м. Каково его положение в плоскости xy в момент времени
?При t = 0 положение протона
и вращается против часовой стрелки. Набросайте траекторию.
Решение
По приведенным данным протон имеет период и угловую частоту:
Положение частицы в
с A = 0.175 м —
Из этого результата мы видим, что протон расположен немного ниже оси x . Это показано на (Рисунок).
Рис. 4.21 Вектор положения протона наПоказана траектория протона. Угол, под которым протон движется по окружности, составляет 5,712 рад, что немного меньше одного полного оборота.
Значение
Мы выбрали начальное положение частицы по оси x- .Это было совершенно произвольно. Если бы была дана другая начальная позиция, у нас была бы другая конечная позиция на t = 200 нс.
Неравномерное круговое движение
Круговое движение не обязательно должно иметь постоянную скорость. Частица может двигаться по кругу и ускоряться или замедляться, показывая ускорение в направлении движения.
При равномерном круговом движении частица, выполняющая круговое движение, имеет постоянную скорость, а круг имеет фиксированный радиус.Если скорость частицы тоже меняется, то мы вводим дополнительное ускорение в направлении, касательном к окружности. Такое ускорение происходит в точке на вершине, которая изменяет скорость вращения, или в любом ускоряющем роторе. В работе «Векторы смещения и скорости» мы показали, что центростремительное ускорение — это скорость изменения направления вектора скорости во времени. Если скорость частицы изменяется, то она имеет тангенциальное ускорение , , то есть скорость изменения величины скорости во времени:
Направление тангенциального ускорения касается окружности, тогда как направление центростремительного ускорения направлено радиально внутрь к центру окружности.Таким образом, частица, движущаяся по кругу с тангенциальным ускорением, имеет общее ускорение , которое является векторной суммой центростремительного и тангенциального ускорений:
Векторы ускорения показаны на (Рисунок). Обратите внимание, что два вектора ускорения
и
перпендикулярны друг другу, при этом
в радиальном направлении и
в тангенциальном направлении.Общее ускорение
точки под углом
и
Рис. 4.22 Центростремительное ускорение указывает на центр круга. Тангенциальное ускорение является касательным к окружности в месте расположения частицы. Общее ускорение — это векторная сумма тангенциального и центростремительного ускорений, которые перпендикулярны.Пример
Полное ускорение при круговом движении
Частица движется по окружности радиуса r = 2.0 мес. В течение интервала времени от t = 1,5 с до t = 4,0 с его скорость изменяется со временем в соответствии с
.Каково полное ускорение частицы при t = 2,0 с?
Стратегия
Нам даны скорость частицы и радиус круга, поэтому мы можем легко вычислить центростремительное ускорение. Направление центростремительного ускорения — к центру круга. Мы находим величину тангенциального ускорения, взяв производную по времени
., используя (Рисунок) и оценив его как t = 2.0 с. Мы используем это и величину центростремительного ускорения, чтобы найти полное ускорение.
Решение
Центростремительное ускорение
направлен к центру круга. Касательное ускорение
Суммарное ускорение
и
от касательной к окружности. См. (Рисунок).
Рис. 4.23 Векторы тангенциального и центростремительного ускорения.Чистое ускорение— это векторная сумма двух ускорений.
Значение
Направления центростремительного и тангенциального ускорений можно описать более удобно в терминах полярной системы координат с единичными векторами в радиальном и тангенциальном направлениях. Эта система координат, которая используется для движения по криволинейным траекториям, подробно обсуждается позже в книге.
Сводка
- Равномерное круговое движение — это движение по окружности с постоянной скоростью.
- Центростремительное ускорение
— это ускорение, которое должно иметь частица, чтобы двигаться по круговой траектории. Центростремительное ускорение всегда направлено к центру вращения и имеет величину
. - Неравномерное круговое движение возникает, когда существует тангенциальное ускорение объекта, выполняющего круговое движение, так что скорость объекта изменяется. Это ускорение называется тангенциальным ускорением.
Величина тангенциального ускорения — это скорость изменения величины скорости во времени.Вектор тангенциального ускорения касается окружности, тогда как вектор центростремительного ускорения направлен радиально внутрь к центру окружности. Общее ускорение — это векторная сумма тангенциального и центростремительного ускорений.
- Объект, выполняющий равномерное круговое движение, можно описать уравнениями движения. Вектор положения объекта
, где A — величина
., который также является радиусом круга, и
— угловая частота.
Концептуальные вопросы
Может ли центростремительное ускорение изменить скорость частицы, совершающей круговое движение?
Может ли тангенциальное ускорение изменить скорость частицы, совершающей круговое движение?
[show-answer q = ”fs-id116516
[скрытый-ответ a = ”fs-id116516
да
[/ hidden-answer]
Проблемы
Маховик вращается со скоростью 30 об / с.Каков полный угол в радианах, на который точка маховика поворачивается за 40 с?
Частица движется по кругу радиусом 10 м с постоянной скоростью 20 м / с. Какая величина ускорения?
[показывать-ответ q = ”fs-id1165168
[скрытый-ответ a = ”fs-id1165168
[/ hidden-answer]
Кэм Ньютон из Carolina Panthers бросает идеальную футбольную спираль на 8.0 об / с. Радиус профессионального футбола составляет 8,5 см по середине короткой стороны. Что такое центростремительное ускорение шнурков на футбольном мяче?
Аттракцион ярмарки вращает своих пассажиров внутри контейнера в форме летающей тарелки. Если горизонтальный круговой путь, по которому следуют гонщики, имеет радиус 8,00 м, при скольких оборотах в минуту гонщики подвергаются центростремительному ускорению, равному ускорению силы тяжести?
[показывать-ответ q = ”fs-id116516
61 ″] Показать решение [/ показывать-ответ]
[скрытый-ответ a = ”fs-id116516
61 ″]
, что равно
[/ hidden-answer]
Бегун, участвующий в забеге на 200 м, должен обойти конец трассы, имеющей дугу окружности с радиусом кривизны 30.0 мес. Бегун начинает забег с постоянной скоростью. Если она преодолевает 200-метровый рывок за 23,2 с и бежит с постоянной скоростью на протяжении всего забега, каково ее центростремительное ускорение при прохождении криволинейной части трассы?
Каково ускорение Венеры по направлению к Солнцу, если принять круговую орбиту?
[показывать-ответ q = ”fs-id11651611 ″] Показать решение [/ показывать-ответ]
[скрытый-ответ a = ”fs-id11651611 ″]
Венера находится на расстоянии 108,2 миллиона км от Солнца и имеет период обращения 0.6152 г.
[/ hidden-answer]
Экспериментальная реактивная ракета движется вокруг Земли вдоль экватора прямо над ее поверхностью. С какой скоростью должен двигаться реактивный двигатель, если величина его ускорения составляет g ?
Вентилятор вращается с постоянной скоростью 360,0 об / мин. Какова величина ускорения точки на одной из лопастей на расстоянии 10,0 см от оси вращения?
[показывать-ответ q = ”fs-id1165168934870 ″] Показать решение [/ показывать-ответ]
[скрытый-ответ a = ”fs-id1165168934870 ″]
[/ hidden-answer]
Точка, расположенная на секундной стрелке больших часов, имеет радиальное ускорение
.Как далеко находится точка от оси вращения секундной стрелки?
Глоссарий
- угловая частота
скорость изменения угла, под которым объект движется по круговой траектории
- центростремительное ускорение
- Компонент ускорения объекта, движущегося по кругу, радиально направленного внутрь к центру круга
- тангенциальное ускорение
- величина которой является временной скоростью изменения скорости.Его направление касается окружности.
- общее ускорение
- векторная сумма центростремительного и тангенциального ускорений
Смартфоны и первый закон Ньютона в эскалаторах и американских горках
Подъем на подъемник на американских горках может быть захватывающим опытом с видами с все более высоких точек и ожиданием ускорений в падениях, петлях, поворотах и поворотах. В этой статье, однако, мы сосредоточены на равномерном прямолинейном движении, где применяется первый закон Ньютона, и сумма сил от езды на теле должна точно компенсировать силу тяжести.
Смартфоны предлагают несколько способов проиллюстрировать движение. Различные датчики предлагают дополнительные представления, а данные с телефона легко доступны через приложения, такие как Physics Toolbox [1, 2] и Phyphox [3]. Например, использование датчика давления в лифте — это способ измерить изменение высоты, которое, в свою очередь, можно использовать для получения графика изменения скорости со временем [4]. Staacks и др. [3] показали, как графики высоты и скорости могут быть объединены с данными акселерометра в самом приложении Phyphox, дополняя опыт тела.Эти примеры показывают, как смартфоны можно использовать для демонстрации реальных примеров движения в классе.
Раздел 2 посвящен движению по наклонной плоскости с подъемом на американских горках (рис. 1) в качестве особого случая, обсуждаемого в разделе 2.1 и проиллюстрированного в разделе 2.2 с данными со смартфона, едущего на поручне эскалатора. . В анализе используется комбинация данных от акселерометра, гироскопа и датчиков давления, а также наблюдений и измерений длины на эскалаторе.
Увеличить Уменьшить Сбросить размер изображения
Рис. 1. Пример подъема на американских горках и силы на гонщика в сопутствующей системе координат, где ось x расположена вдоль рельсового пути, а ось z перпендикулярна рельсовому пути. (Таким образом, ось y указывает влево в правой системе координат.)
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияРаздел 2.3 представлено движение в пуске LSM (линейный синхронный двигатель) с небольшим уклоном в гору как частный случай наклонной плоскости. Приложение Tracker [5] используется для подтверждения контринтуитивного результата, что ускорение очень мало в течение большей части запуска.
Наконец, в разделе 3 анализируется по существу равномерное прямолинейное движение с вращением вокруг линии сердца.
1.1. Акселерометры, силы и второй закон Ньютона
Ускорение как вторая производная положения может показаться абстрактным, но когда оно связано с силой через второй закон Ньютона, опыт тела может быть добавлен к более формальным представлениям.Согласно второму закону Ньютона, силы и масса входят в описание движения. Поскольку сила тяжести действует всегда, общую силу, действующую на объект, можно записать в виде суммы, где — сумма внешних сил, способствующих ускорению. Для свободного падения, где ускорение определяется как. Для покоя или неускоренного движения сумма внешних сил должна быть равна.
Вне зависимости от того, используется ли он в более традиционном учебном оборудовании [6, 7] или в смартфонах, акселерометр, несмотря на свое название, измеряет не ускорение, а вместо этого, или g, силу тяжести.Этот «G-фактор» не зависит от массы — следствие эквивалентности инертной и гравитационной масс [8–10]. Данные трехмерного акселерометра выражаются относительно осей датчика — точно так же, как ощущения от человеческого тела зависят от его ориентации. Вычисление G-фактора, действующего на ваше тело во время поездки, может показаться более важным, чем проверка того, согласуется ли результат, например, 16,7 кН для силы, действующей на автомобиль с американскими горками, с ответом в конце книги.
Традиционно оси координат для биомеханических воздействий на человеческое тело определяются осью x , направленной вперед, и осью z вверх вдоль позвоночника, как на рисунке 1.Для правой системы координат ось y должна указывать влево. Многие телефоны теперь имеют доступ к гироскопам, измеряющим угловые скорости вокруг осей x , y и z , называемых креном, тангажем и рысканием. Их можно представить как выполнение колеса телеги, сальто и пируэт в спортивном классе. Примеры крена эскалатора и сердечной линии в этой статье связаны с вращением по тангажу и крену соответственно. (См. Также [11, 12] и проверьте оси на своем телефоне.)
Сила и движение в наклонных плоскостях являются обязательной частью любого вводного курса физики, и обучение обычно включает стрелки силы в учебнике, возможно также блоки, динамометры и демонстрации, чтобы проиллюстрировать, что нормальная сила должна быть, а касательная сила для компенсации направленной вниз силы тяжести, мг, чтобы удерживать массу в состоянии покоя или с постоянной скоростью (рисунок 2). Однако силы на наклонной плоскости также можно проиллюстрировать с помощью трехмерного акселерометра, например.грамм. в смартфоне.
Увеличить Уменьшить Сбросить размер изображения
Рис. 2. Силы, действующие на точку поезда американских горок Helix во время второго пуска. Нормальная сила ( Н z ) должна быть на линейной части пути. Пока поезд ускоряется, поступательная сила ( Н, , , x , ) должна быть больше, чем нисходящая составляющая силы тяжести вдоль рельсового пути.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения2.1. Горки для американских горок
Горки для американских горок, например как показано на рисунке 1, это частный случай наклонной плоскости и пример равномерного прямолинейного движения. Таким образом, сумма силы тяжести, направленной вниз, и сил поезда, действующего на водителя, должна быть равна нулю, поскольку поезд движется в гору с постоянной скоростью. На рис. 1 показано, как сила от сиденья, перпендикулярная рельсу, и сила от спинки, параллельная рельсу, объединяются, чтобы компенсировать силу тяжести в подъемном холме.
Эскалаторы более легкодоступны, чем подъемники для американских горок, и предлагают хорошую практику в понимании данных датчиков. Графики акселерометра (рис. 3) для смартфона, едущего на поручне эскалатора (рис. 4), очень похожи на график акселерометра, показывающий подъем и подъем на традиционных американских горках. Фактически, большинство эскалаторов имеют тот же уклон, что и подъемный холм Лисебергбанан (рис. 1). Опыт райдера, конечно, совсем другой: на эскалаторе вы встаете, как если бы вы были на земле, тогда как на подъемнике Lisebergbanan ваше тело отклоняется назад.Точно так же смартфон, лежащий на поручне эскалатора, поворачивается, когда эскалатор движется вверх.
Увеличить Уменьшить Сбросить размер изображения
Рис. 3. Данные акселерометра, гироскопа и давления, поднимаются по эскалатору на рис. 4 и затем снова опускаются. Эскалатор разделен на две части с переходом между ними. Нижний эскалатор насчитывает около 87 ступенек. (Шумные данные о движении по переходу между двумя частями эскалаторов удаляются.)
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияУвеличить Уменьшить Сбросить размер изображения
Рис. 4. Эскалатор в Лисеберге, вид изнутри и снаружи, а также деталь ступеньки эскалатора. Измерение на месте показывает см и см.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения2.2. Эскалаторы
Эскалаторы соединяют разные уровни в магазинах, на вокзалах и в парках развлечений, как показано на рисунке 4.На рисунке 3 показаны данные с акселерометра, гироскопа и датчиков давления смартфона. (Как различные графики на рисунке 3 могут определить, идет ли движение вверх или вниз?)
Когда эскалатор движется вверх (или вниз) после первых шагов перехода, движение является примером первого закона Ньютона, в котором сила от эскалатор на человеке, едущем на нем, должен компенсировать силу тяжести. Это также относится к смартфону, помещенному на поручень. Однако, в то время как сила, действующая на человека, направлена прямо от ступеньки, оси смартфона совпадают с наклоном.Данные на рисунке 3 хорошо согласуются с углом, полученным также при измерении длины и высоты ступеньки эскалатора (рисунок 4). Для этого угла ожидается нормальная сила, действующая на телефон (определяемая как ось z на графиках), в то время как сила в прямом направлении движения (определяемая как ось x на графиках) определяется как .
Третий способ оценки угла — использовать соотношение и выполнить численное интегрирование данных для угловой скорости,.Приближение получается путем подсчета прямоугольников на графике на рисунке 5, напоминая учащимся, что интеграция может применяться к другим отношениям и переменным, чем те, которые обычно используются в классе математики.
Увеличить Уменьшить Сбросить размер изображения
Рис. 5. Детали данных угловой скорости на одном из графиков на рис. 3. Интегрирование угловой скорости дает изменение угла от горизонтали к наклону эскалатора.Каждый прямоугольник соответствует угловому изменению 0,01 радиана.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияВ реальной жизни проверка вашего ответа вряд ли будет осуществляться в форме проверки обратной стороны книги, а скорее путем проверки согласованности между различными способами получения результата. Данные эскалатора предлагают множество дополнительных проверок согласованности: перепад давления на самом длинном эскалаторе, показанном на рисунке 3, составляет p гПа. Для плотности воздуха это дает m.Ручной подсчет в неподвижном эскалаторе обнаружил 87 ступеней высотой 20 см, но меньше для нескольких ступенек с обоих концов. Примерно 80 шагов по 20 см / шаг также дает m. График показывает, что подъем в гору в самом длинном лифте занимает около 64 с, что соответствует вертикальной составляющей скорости 0,25 м с -1 . Размеры, показанные на рисунке 4, дают уклон. Для длинных лифтов это международный стандартный уклон, а 0,5 м с -1 — обычная скорость, которая, как установлено, обеспечивает оптимальную пропускную способность для непрерывного потока людей.Это соответствует вертикальной составляющей скорости 0,25 м с −1 , что согласуется с измерениями, представленными здесь.
2.3. Запуск американских горок
Традиционные подъемные горки с цепями заменены технологиями запуска во многих новых американских горках. Гидравлические подстаканники обычно дают поездам ускорение в 1 g или более за пару секунд (как исследовано, например, в [13]) вдоль почти горизонтального пути. Энергия для запуска также может быть обеспечена технологией LSM (линейный синхронизированный двигатель), где электромагнитные взаимодействия используются для движения поезда.На рисунке 6 показана линейная часть трассы, которая образует второй запуск LSM американских горок Helix. Подъем в гору менее крутой, чем у традиционных подъемников, но позволяет добавить механической энергии к поезду на меньшем расстоянии, чем если бы спуск был горизонтальным. Ближе к концу запуска поезд движется в гору с почти постоянной скоростью.
Увеличить Уменьшить Сбросить размер изображения
Рисунок 6. Второй запуск, ведущий к перевернутому цилиндру американских горок Helix в Лисеберге. Линейная часть трассы длиной 69,5 м имеет подъем в гору.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешения2.3.1. Данные акселерометра.
На рисунке 7 показан «вертикальный» компонент (т.е. компонент « z », ортогональный треку) данных акселерометра для американских горок Helix, собранных с помощью беспроводной динамической сенсорной системы (WDSS) [6].Затенены участки с практически равномерным прямолинейным движением. На линейных участках пути эта сила, перпендикулярная дорожке, должна составлять mg независимо от ускорения, как показано на рисунке 2. График на рисунке 7 действительно показывает вертикальную силу, очень близкую к mg для обоих запусков, так как ожидается для малых углов.
Увеличить Уменьшить Сбросить размер изображения
Рис. 7. График акселерометра для американских горок Helix вместе с данными о высоте, показывающий компонент вертикально по отношению к сиденью.Заштрихованные области отмечают части с практически равномерным прямолинейным движением во время двух запусков LSM, а также вращение сердечной линии, описанное в разделе 3.
Загрузить рисунок:
Стандартное изображение Изображение высокого разрешенияДля постоянной скорости поступательная сила (составляющая x ) со стороны спинки сиденья будет равна мг для подъема на уклоне второго запуска. Это значение было отмечено сплошной зеленой линией на рисунке 8. Данные акселерометра больше, начиная с 0.От 50 мг до 0,31 мг за 2,32 с. Таким образом, данные указывают на ускорение, которое снижается с 0,33 g до 0,14 g (с «рывком» [11] -0,08 g с -1 ).
Увеличить Уменьшить Сбросить размер изображения
Рисунок 8. Детали данных акселерометра для второго запуска в Helix, показанные на рисунке 6. Красный график показывает силу, перпендикулярную траектории, а зеленый график показывает компонент в направлении движения, в единицах. мг.На синем графике показан боковой компонент, который будет равен нулю для правильно выровненного датчика. Сплошная красная линия соответствует величине нормальной силы для. Сплошная зеленая линия обозначает величину силы, необходимой для компенсации тангенциальной составляющей силы тяжести, для поддержания постоянной скорости. Пунктирная зеленая линия соответствует измеренным данным методом наименьших квадратов. Пунктирная черная линия показывает аппроксимацию методом наименьших квадратов для общего G-фактора, который без ускорения равен 1.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияОднако для извлечения тангенциальной силы из измеренных данных требуется точная ориентация осей координат, поскольку в данных акселерометра преобладает сила, ортогональная дорожке. Устройства, которые носят на теле, обычно недостаточно точно ориентированы, чтобы надежно измерить любые отклонения от значения. Ориентация устройства относительно тела также может немного измениться во время езды, вызывая небольшие отклонения даже после попытки переориентации осей координат в собранных данных.
Величина общей силы, прилагаемой поездом к гонщику для ускорения вперед a на подъеме (см. Рисунок 2), определяется выражением. Измеренные значения общей силы не должны зависеть от ориентации устройства. Рисунок 8 включает аппроксимацию методом наименьших квадратов значений общей силы (падающей с 1,12 мг до 1,09 мг), соответствующих ускорениям вверх по склону в диапазоне от 0,36 г до 0,30 г.
Однако из-за больших сокращений, связанных с вычитанием чисел, близких к 1, можно ожидать, что эти значения будут еще более неопределенными, чем значения, основанные на ускорении вперед ( x ), обсужденном выше.
2.3.2. Видеоанализ движения.
Еще один способ обнаружить изменения скорости по мере того, как поезд движется вверх по стартовой части пути, — это использовать фрагмент ролика. На рисунке 9 показан фрагмент запуска, проанализированный с помощью программного обеспечения Tracker [5], после движения передней и задней части поезда, кадр за кадром. Длина поезда, как видно на видео, оценивается в 13,5 м
Увеличить Уменьшить Сбросить размер изображения
Рисунок 9. Скриншоты фильма (30 кадров в секунду) второго запуска американских горок Helix, проанализированные с помощью программы Tracker [5]. Расстояние между осями колес составляет 2,50 м, что дает общую длину 12,50 м между первой и последней осями и расчетное расстояние m между передней и задней частью поезда, как показано на видео. Три ряда снимков экрана были выровнены по неподвижным объектам, что указывает на небольшие движения камеры.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияВ начале видимой части пути задняя часть поезда проезжает определенную точку примерно 20 кадров (0.На 67 с) позже передней, что соответствует скорости 20,2 м с −1 . Передняя часть поезда достигает верхней части пути примерно через 1,7 с после выхода слева на видео. Ближе к концу линейной части задняя часть отстает от передней примерно на 18 кадров = 0,6 с, что соответствует скорости примерно 22,5 м с -1 . Тогда ускорение для этой части пути можно оценить как 0,14 g. Общая дальность пуска составляет 69,5 м, что составляет примерно 3 с. Таким образом, первый файл 1.3 секунды запуска, когда измеренное ускорение было больше, не были частью видеоанализа.
С учетом неопределенностей, возникающих из оценки длины поезда и временного разрешения, обеспечиваемого частотой кадров, окончательная скорость видео может быть записана как мс -1 . Заданная скорость после пуска 23,5 м с −1 . Оценка среднего ускорения основана на изменении от 20 до 18 кадров для прохождения поезда. Таким образом, неопределенность в половину кадра соответствует 25% неопределенности в ускорении, что дает g.Данные видеоанализа согласуются с постоянной скоростью к концу запуска.
2.3.3. Сравнение с техническими характеристиками.
24 статора, образующие второй пуск, могут обеспечить достаточно энергии, чтобы поезд перевалил через вершину, даже если по какой-то причине он достигает старта с очень низкой (или нулевой) скоростью. Максимально возможное ускорение составляет 0,9 г. Однако при нормальных пробегах требуется гораздо меньшее ускорение, а когда поезд достигает заданной стартовой скорости 23.5 м с −1 , остальная часть запуска только добавляет энергии для поддержания этой скорости. Данные акселерометра, собранные в мае 2014 года, примерно через неделю после открытия, показали снижение ускорения с 0,33 g до 0,14 g во время запуска, хотя следует отметить, что эти данные были довольно зашумленными. Видео, записанное в конце сезона несколькими годами позже, показало, что скорость была постоянной к концу.
В третьей заштрихованной области графиков на рисунке 7 вертикальная составляющая изменяется значительно сильнее.Это «вращение по линии сердца», при котором тело движется почти по прямой линии, вращаясь по оси, близкой к сердцу. Рельсы и поезд движутся по линии сердца, что приводит к менее очевидной форме пути, показанной на рисунках 10 и 11. Во время движения поезд оказывает восходящее усилие, чтобы компенсировать силу тяжести. Опыт всадника, конечно, сильно различается в зависимости от ориентации тела. Когда тело поворачивается на угол вокруг линии сердца (ось x ), сила езды направлена чисто вбок (обычно это называется направлением y или «боковой» силой.) Когда угол больше чем, вы испытываете «отрицательные G» с силой, прежде всего, между ограничителем и вашим телом, которое может отделиться от сиденья.
Увеличить Уменьшить Сбросить размер изображения
Рис. 10. Ролик сердечной линии Helix в Лисеберге.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияУвеличить Уменьшить Сбросить размер изображения
Рисунок 11. Усиливает всадников в броске по линии сердца. Система координат следует за всадником, который слегка перевернут в обоих отмеченных положениях.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияНа рис. 12 показаны данные трехмерного акселерометра, движущегося вместе с гонщиком по сердечной линии Helix, вместе с теоретическими значениями и наложенными друг на друга. Другой пример приведен в [13].
Увеличить Уменьшить Сбросить размер изображения
Рисунок 12. Данные акселерометра для крена по линии сердца на рисунках 10 и 11, с теоретическими кривыми и наложенными пунктирными линиями для отрицательного крена (т. Е. Вращение против часовой стрелки вокруг оси x , если смотреть со стороны всадника) крен с рад с -1 . Кролики вверху иллюстрируют вращение тела вокруг линии сердца, а цветные стрелки внизу показывают силы, действующие на тело для различных ориентаций (при этом зеленая стрелка обозначает силу тяжести, а черный кружок в конце пунктирная линия, символизирующая голову всадника).
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияВ случае чисто линейного движения без вращения, двукратное интегрирование данных акселерометра — это способ получить высоту или расстояние, как используется, например, в [4, 13–15]. Графики акселерометра для равномерного прямолинейного движения при вращении по линии сердца показывают, почему одни только данные акселерометра не могут использоваться для определения изменения положения. Силы поезда на всадника изменяются примерно в направлении z и y , как показано на рисунке 12.Подобные графики также можно получить, вращая смартфон вокруг одной оси, как показано на рисунке 13. Эти данные акселерометра также могут быть получены для совершенно другого движения без вращения.
Увеличить Уменьшить Сбросить размер изображения
Рис. 13. Данные акселерометра, собранные с помощью приложений Physics Toolbox [1] и Phyphox [3] при вращении практически неподвижного смартфона.Разрешения на использование снимков экрана, полученные от владельцев Physics Toolbox и Phyphox.
Загрузить рисунок:
Стандартный образ Изображение высокого разрешенияВсе примеры, представленные в этой работе, предоставляют ряд различных представлений движения, а также примеры различных способов получения результатов, которые можно сравнивать друг с другом. Эти примеры также можно использовать, чтобы напомнить студентам, что термин «нормальный» в «нормальной силе» относится к , а не к , чему студенты могли поверить из-за недостаточного разнообразия вводных примеров [16].Примеры показывают, как теоретические идеализации могут дать содержательные сравнения с достоверными данными, и что конец книги — не единственный источник проверки вашей работы.
Примеры крена эскалатора и сердечной линии отражают, что люди не являются точечными частицами, и что опыт зависит от ориентации тела, которая может быть зафиксирована данными смартфона и их зависимости от ориентации устройства. Оба примера также можно использовать для демонстрации того, что данные о вращении необходимы для полного описания движения в пространстве.
Данные датчиков могут обеспечивать связь между математическими определениями, графическими представлениями и опытом тела в реальных ситуациях. Предлагая более широкий спектр приложений, вы можете поддержать концептуальное обучение студентов [17]. Эта статья призвана вдохновить учителей расширить свой репертуар примеров первого закона Ньютона и равномерного прямолинейного движения.
Я хотел бы выразить свою признательность компании Liseberg за многолетнее сотрудничество и поддержку, включая возможности сбора данных и технические данные.В частности, я хотел бы поблагодарить Кеннета Берндтссона за предоставление технических характеристик американских горок Helix.
Прямолинейное движение
Прямолинейное движение — это другое название прямолинейного движения. Этот тип движения описывает движение частицы или тела.Говорят, что тело испытывает прямолинейное движение, если любые две частицы тела проходят одинаковое расстояние по двум параллельным прямым линиям. На рисунках ниже показано прямолинейное движение частицы и тела.
Прямолинейное движение частицы:
Прямолинейное движение тела:
На приведенных выше рисунках x (t) представляет положение частиц вдоль направления движения как функцию времени t .
Зная положение частиц, x (t) , мы можем вычислить смещение, скорость и ускорение. Это важные величины, которые следует учитывать при оценке кинематики проблемы.
Распространенное предположение, которое применяется к многочисленным задачам, связанным с прямолинейным движением, состоит в том, что ускорение является постоянным. С постоянным ускорением мы можем вывести уравнения для положения, смещения и скорости частицы или тела, испытывающего прямолинейное движение.
Самый простой способ вывести эти уравнения — использовать исчисление.
Ускорение определяется по формуле
, где a — ускорение, которое мы определяем как постоянное.
Проинтегрируйте приведенное выше уравнение относительно времени, чтобы получить скорость. Это дает нам
, где v (t) — скорость, а C 1 — постоянная.
Проинтегрируйте приведенное выше уравнение относительно времени, чтобы получить положение. Это дает нам
, где x (t) — позиция, а C 2 — постоянная.
Константы C 1 и C 2 определяются начальными условиями в момент времени t = 0.Начальные условия:
В момент времени t = 0 позиция равна x 1 .
В момент времени t = 0 скорость равна v 1 .
Подставляя эти два начальных условия в два приведенных выше уравнения, мы получаем
Следовательно, C 1 = v 1 и C 2 = x 1 .
Это дает нам
Для удобства установите x (t) = x 2 и v (t) = v 2 .Как результат
Смещение определяется как Δ d = x 2 — x 1 . Следовательно, уравнение (1) принимает вид
Если мы хотим найти уравнение, которое не включает время t , мы можем объединить уравнения (2) и (3), чтобы исключить время как переменную. Это дает нам
Уравнения (1), (2), (3) и (4) полностью описывают движение частиц или тел, испытывающих прямолинейное (прямолинейное) движение, где ускорение a является постоянным.
Для случаев, когда ускорение непостоянно, необходимо получить новые выражения для положения, смещения и скорости частицы. Если ускорение известно как функция времени, мы можем использовать исчисление, чтобы найти положение, смещение и скорость так же, как и раньше.
В качестве альтернативы, если нам дана позиция x (t) как функция времени, мы определяем скорость, дифференцируя x (t) один раз, и мы определяем ускорение, дифференцируя x (t) дважды .
Например, положение x (t) частицы задается следующим образом:
Таким образом, скорость v (t) определяется выражением
Ускорение a (t) определяется выражением
Вернуться на страницу Кинематика
Вернуться на главную страницу Real World Physics Problems
Математика профилей управления движением
Инженеры по управлению движением часами оптимизируют параметры настройки своих контроллеров движения на основе сервоприводов.Но что, если они используют шаговые двигатели? А что, если, сколько бы времени они ни тратили на настройку, они не могут добиться желаемой производительности?
Для многих двигателей и систем управления ответ состоит в том, чтобы вместо этого сосредоточиться на профиле движения. Расширенные функции профилирования, такие как асимметричное ускорение и замедление, 7-сегментное профилирование S-образной кривой, изменение на лету и электронный кулачок, теперь широко доступны, предоставляя инженерам новые инструменты, которые заставляют машины работать быстрее и эффективнее.В этой статье вы познакомитесь с математикой профилей движения и обсудите, какие профили лучше всего подходят для каких приложений. Это также даст представление о том, как «настроить» профиль движения для максимальной производительности.
Профили управления S-образной кривой и трапециевидным движением
Хотя сегодня используется множество различных профилей движения, хорошей отправной точкой является перемещение от точки к точке. Для большого количества приложений, включая медицинскую автоматизацию, научные приборы, системы наведения и многие типы общей автоматизации, перемещение от точки к точке используется чаще, чем любой другой профиль управления движением.Из-за этого оптимизация этого профиля будет иметь наибольшее общее влияние на производительность системы. Двухточечный означает, что после остановки груз ускоряется до постоянной скорости, а затем замедляется так, что конечное ускорение и скорость равны нулю в момент прибытия груза в запрограммированный пункт назначения.
Два профиля, обычно используемые для двухточечного профилирования, — это S-образный профиль и его более простой родственник — трапециевидный профиль. Они показаны на рисунке 1.
Рисунок 1: S-образный профиль и трапециевидный профиль
В контексте перемещения от точки к точке полный профиль движения S-образной кривой состоит из 7 различных фаз движения. Фаза I начинает перемещать груз из состояния покоя с линейно возрастающим ускорением, пока не достигнет максимального ускорения. В Фазе II профиль ускоряется с максимальной скоростью до тех пор, пока он не должен начать уменьшаться по мере приближения к максимальной скорости. Это происходит в Фазе III, когда ускорение линейно уменьшается, пока не достигнет нуля.В Фазе IV управляющая скорость остается постоянной до тех пор, пока не начнется замедление, после чего профили замедляются симметрично Фазам I, II и III.
С другой стороны, трапециевидный профиль имеет 3 фазы. Это подмножество профиля S-образной кривой, имеющее только фазы, соответствующие № 2 профиля S-образной кривой (постоянное ускорение), № 4 (постоянная скорость) и № 6 (постоянное замедление). Это уменьшенное количество фаз подчеркивает разницу между этими двумя профилями: профиль S-образной кривой имеет дополнительные фазы движения, которые переходят между периодами ускорения и периодами отсутствия ускорения.Трапецеидальный профиль имеет мгновенные переходы между этими фазами. Это можно увидеть на графиках ускорения соответствующих профилей скорости для этих двух типов профилей. Характеристика движения, определяющая изменение ускорения или переходный период, называется рывком. Рывок определяется как скорость изменения ускорения во времени. В трапециевидном профиле рывок (изменение ускорения) бесконечен на фазовых переходах, в то время как в профиле S-образной кривой «рывок» является постоянной величиной, распространяя изменение ускорения в течение определенного периода времени.
Что за рывок
То, что профиль S-образной кривой более гладкий, чем трапециевидный, видно из приведенных выше графиков. Почему, однако, S-образный профиль приводит к меньшим колебаниям нагрузки? Ответ на этот вопрос связан с тем фактом, что для данной нагрузки, чем выше толчок, тем больше будет генерироваться нежелательная энергия вибрации и тем шире будет частотный спектр энергии вибрации.
Это означает, что чем быстрее изменяется ускорение, тем мощнее будут колебания и тем большее количество мод колебаний будет возбуждено.Это показано на рисунке 2. И поскольку энергия вибрации поглощается механикой системы, это может вызвать увеличение времени установления или снижение точности, если частота вибрации совпадает с резонансами в механической системе и системе управления.
Рисунок 2: Индуцированные колебания для S-образного профиля (2A) и трапециевидного профиля (2B)
Я хочу идти быстро
Поскольку трапециевидные профили проводят свое время при полном ускорении или полном замедлении, они, с точки зрения выполнения профиля, быстрее, чем профили с S-образной кривой.Но если этот подход «все включено» / «все выключено» приводит к увеличению времени установления, преимущество теряется. Часто только небольшое количество «S» (переход между ускорением и отсутствием ускорения) может существенно снизить индуцированную вибрацию. Таким образом, для оптимизации пропускной способности профиль S-образной кривой должен быть «настроен» для каждой заданной нагрузки и заданной желаемой скорости передачи.
Какая форма S-образной кривой подходит для данной системы? В зависимости от приложения конкретный выбор формы S-образной кривой будет зависеть от механической природы системы и желаемых технических характеристик.Например, в медицинских приложениях, которые связаны с перемещением жидкости, которую не следует толкать, было бы целесообразно выбрать профиль без сегментов фазы II и VI, вместо этого как можно более широко распределяя переходы ускорения, тем самым максимизируя плавность.
В других приложениях, связанных с высокоскоростным захватом и размещением , общая скорость переноса является наиболее важной, поэтому хорошим выбором может быть S-образная кривая с переходными фазами (фазы I, III, V и VII), которые составляют 5-15% от Фаза II и VI.В этом случае профиль S-образной кривой добавит небольшое количество времени к общему времени передачи, но из-за уменьшения колебаний нагрузки в конце перемещения общее эффективное время передачи может быть значительно уменьшено. Метод проб и ошибок с использованием системы измерения движения, как правило, является лучшим способом определения правильной величины «S», потому что моделирование реакции на вибрацию сложно и не всегда точно.
Уравнения трапециевидного профиляБазовая математика, необходимая для выполнения трапецеидальных профилей, проста.Однако есть две формы, которые можно использовать; Непрерывная форма, которая будет знакома из физики средней школы, и форма дискретного времени, которая используется в большинстве решений для управления движением, в которых используются микропроцессоры или DSP (цифровой сигнальный процессор) для генерации нового набора параметров движения на каждом тике движение «часы».
Уравнения профиля S-образной кривой
Поскольку это кривые третьего порядка по сравнению с кривыми второго порядка, и поскольку существует семь против трех отдельных сегментов движения, S-кривые от точки к точке более сложны, чем трапеции.В частности, непросто рассчитать тормозной путь для заданного набора значений профиля. Соответственно, многие системы профилирования S-образной кривой ограничивают возможность внесения изменений на лету или не допускают асимметричных профилей. Эти ограничения позволяют получить информацию о том, как долго и на каком расстоянии профиль управления движением ранее ускорялся, чтобы определить, когда начинать замедление.
Соединение точка-точка
Конечная цель любого профиля — привести характеристики системы движения в соответствие с желаемым применением.Трапецеидальный и S-образный профили хорошо работают, когда кривая отклика системы движения довольно плоская. Другими словами, когда выходной крутящий момент не меняется так сильно в диапазоне скоростей, которые будет испытывать система. Это верно для большинства систем серводвигателей, будь то щеточный или бесщеточный постоянного тока.
Однако шаговые двигателине имеют плоских кривых крутящего момента и скорости. Выходной крутящий момент является нелинейным, иногда имеет большое падение в месте, называемом «нестабильность среднего диапазона», и обычно имеет падение при более высоких скоростях.На рис. 3 приведены примеры типичных кривых крутящего момента и скорости для сервоприводов и систем с шаговыми двигателями.
Рисунок 3: Типичные кривые крутящего момента / скорости для сервоприводов (3A) и шаговых двигателей (3B)
Нестабильность в среднем диапазоне возникает на частоте шага, когда собственная резонансная частота двигателя совпадает с текущей частотой шага. Для решения проблемы нестабильности в среднем диапазоне наиболее распространенным методом является использование ненулевой начальной скорости. Это означает, что профиль мгновенно «перескакивает» на запрограммированную скорость при начальном ускорении и во время замедления.Это показано на рисунке 4. Несмотря на то, что этот метод грубый, этот метод иногда дает лучшие результаты, чем плавное нарастание нуля, особенно для систем, в которых не используется микрошаговый привод.
Рисунок 4: Ненулевая начальная скорость
Для решения проблемы падения крутящего момента при более высоких скоростях можно использовать параболический профиль, показанный на рисунке 5. Соответствующая кривая ускорения имеет характеристику, заключающуюся в том, что ускорение наименьшее при максимальной скорости.Это хорошо подходит для систем с шаговыми двигателями, поскольку на более высоких скоростях доступен меньший крутящий момент. Но обратите внимание, что начальное и конечное ускорения очень высокие, и нет фазы «S», где ускорение плавно переходит в ноль. Таким образом, если колебание нагрузки является проблемой, параболические профили могут не работать так же хорошо, как S-образная кривая, несмотря на то, что стандартный профиль S-образной кривой не оптимизирован для шагового двигателя с точки зрения кривой крутящего момента / скорости.
Рисунок 5: Параболический профиль
Уравнения параболического профиляПараболические профили тесно связаны с S-образными кривыми, потому что они являются движениями третьего порядка.И, как и в случае с профилями S-образной кривой, вычисление расстояния до замедления затруднено, особенно если разрешено изменение профиля на лету.
Стол на 65 536 Пожалуйста,
Окончательный вариант создания профилей от точки к точке, или фактически для других типов профилей, включая создание непрерывной траектории, такой как используемый в станках с ЧПУ (числовое программное управление), заключается в создании пользовательского профиля, который компенсирует точную нагрузку. и моторные характеристики системы.Такой профиль будет ускорять двигатель с учетом доступного крутящего момента двигателя в каждой точке скорости, механических резонансов в каждой точке скорости и кинематики привода или рычага в механизме.
Поскольку кривые крутящего момента двигателя не соответствуют простым математическим принципам, и поскольку уравнения кинематической компенсации сложны, эти вычисления обычно вычисляются заранее и сохраняются в таблице «векторов» движения. Эта таблица обычно создается как массив векторов положения или времени с соответствующей записью для скорости и ускорения в каждой точке кривой.
В этой конфигурации движок просто предоставляет общую возможность загружать и выполнять список векторов, и ответственность за вычисления ложится на пользователя. Несмотря на эту дополнительную работу, при наличии особых условий, например, когда двигатели или механизмы сильно нелинейны, двухточечные профили с настольным управлением могут обеспечить значимое повышение производительности и могут стоить затраченных усилий.
Cam We Talk?
Помимо двухточечных перемещений, существует широкий спектр приложений движения, которые требуют повторяющегося движения, индексируемого таймером или кодировщиком, или профиля огибающей основной скорости.Такие приложения подпадают под категорию электронных кулачков, которая включает связанный, но более простой подход, известный как электронная передача.
Камерыобычно также используют загружаемые таблицы. В этом случае таблицы используются для определения целевой позиции для каждого положения энкодера или такта главных часов. Пользователь может загрузить трапециевидный профиль, профиль S-образной кривой или, что чаще всего, пользовательский профиль, который воспроизводит функцию механического кулачка особой формы.
Рисунок 6: Режим профиля кулачка
Существует несколько способов указать взаимосвязь между главными часами и управляемой осью.Наиболее распространенным является определение количества отсчетов энкодера, составляющих 360-градусный «поворот» главного энкодера, а затем возможность определения одной или нескольких выходных точек в каждой градусной позиции таблицы. При выполнении таблицы, после считывания последнего местоположения таблицы, контроллер движения «вернется» в исходное положение и перезапустится с первого. Из-за этого цели начальной и конечной позиции должны быть одинаковыми или очень похожими, чтобы избежать прерывистого скачка в движении.
Вариантом этого подхода является обработка каждой записи таблицы как относительного расстояния для перемещения, а не как абсолютного желаемого местоположения оси.При использовании этого подхода не требуется, чтобы первая и последняя записи в таблице совпадали.
Electronic Gearing — это более простая версия кулачкового механизма, где отношение между ведущим может быть выражено как фиксированное отношение к ведомой оси. Передаточные числа могут быть положительными или отрицательными, а также могут быть больше или меньше единицы, что означает, что ведомая ось может усиливать или уменьшать движение, заданное главным энкодером.
Сводка
Выбор правильного профиля управления движением может улучшить плавность, снизить износ и сократить время переноса для широкого диапазона приложений управления движением.Трапецеидальные профили полезны, но ограничены, потому что нет способа определить переходы между областями ускорения. S-образные кривые решают эту проблему, но, соответственно, более сложны математически. Другой важный профиль для двухточечных перемещений — это параболический профиль, обычно используемый только для систем на основе шаговых двигателей. Табличные подходы к профилированию движения также популярны, и, в частности, загружаемые электронные кулачки широко используются в ряде отраслей.
Автор:
Чак Левин
Основатель и генеральный директор
Performance Motion Devices, Inc.
Продукты PMD с расширенными возможностями профилирования
PMD состоит из трех групп продуктов, которые обеспечивают продвинутые S-образные и трапециевидные профили, программируемую начальную скорость и возможность кулачка. Несмотря на разную упаковку, все они контролируются C-Motion, простым в использовании языком управления движением PMD и идеально подходят для использования в широком спектре медицинских , лабораторных , полупроводниковых , роботизированных и промышленных систем управления движением. Приложения.
Семейство ИС Magellan
Одно- и многоосные ИС управления перемещением Magellan идеально подходят для создания собственной платы управления станком с нуля. Они оснащены новейшими технологиями создания профилей, замыкания серво-петли, текущего контроля, синхронизации профиля, управления событиями и генерации выходного сигнала ШИМ (широтно-импульсной модуляции). Эти недорогие и простые в использовании ИС также доступны в версиях, которые поддерживают кулачок и синхронизированное многокоординатное контурирование с помощью опции режима профиля, определяемого пользователем.
Подробнее >>Цифровые приводы ION
Цифровые приводы ION имеют в своей основе микросхему Magellan и объединяют ее с мощным цифровым усилителем для создания компактного прочного модуля с кабельным подключением. Независимо от того, используются ли они для S-образных перемещений от точки к точке, управления высокоскоростным шпинделем или для решения ваших новейших задач в области робототехники, ION — это экономичные устройства plug and play, которые мгновенно запускают ваше приложение.
Подробнее >>Платы управления движением Prodigy
Платы управления движением Prodigy имеют в своей основе многоосевую микросхему Magellan и выпускаются в различных форм-факторах, включая PC-104, автономные и автономные со встроенными усилителями Atlas (Prodigy / CME Machine Controller). В дополнение к поддержке сложных режимов профилирования, описанных в этой статье, эти карты обеспечивают многомерное синхронизированное контурирование с помощью пользовательского режима профиля PMD для решения всех задач вашего следующего проекта проектирования станка.
Подробнее >>Вас также может заинтересовать:
| ||||||||
Что такое LVDT? | линейно-регулируемый дифференциальный трансформатор
LVDT (линейный регулируемый дифференциальный трансформатор = представляет собой электромеханический датчик, используемый для преобразования механического движения или вибраций, в частности прямолинейного движения, в переменный электрический ток, напряжение или электрические сигналы и обратно. Приводные механизмы используются в основном для систем автоматического управления или в качестве механические датчики движения в измерительной технике.Классификация электромеханических преобразователей включает принципы преобразования или типы выходных сигналов.
Короче говоря, линейный преобразователь обеспечивает величину выходного напряжения, связанную с измеряемыми параметрами, например, силой, для простой обработки сигнала. Устройства LVDT Sensor чувствительны к электромагнитным помехам. Снижение электрического сопротивления можно улучшить с помощью более коротких соединительных кабелей, чтобы исключить значительные ошибки. Для датчика линейных перемещений требуется от трех до четырех соединительных проводов для питания и подачи выходного сигнала.
Физически конструкция LVDT представляет собой полый металлический цилиндр, в котором вал меньшего диаметра свободно перемещается вперед и назад вдоль длинной оси цилиндра. Вал или толкатель заканчивается магнитопроводящим сердечником, который должен находиться внутри цилиндра или узла катушки, когда устройство работает.
В обычной практике толкатель физически прикреплен к подвижному объекту, положение которого должно быть определено (измеряемая величина), в то время как узел катушки прикреплен к фиксированной контрольной точке.Движение измеряемой величины перемещает сердечник внутри узла катушки; это движение измеряется электрически.
Принцип преобразования:- Электромагнитный
- Магнитоэлектрический
- Электростатический
- Аналоговый и дискретный выход
- Цифровой
- Статические и динамические характеристики
- Чувствительность или коэффициент передачи — E = Δy / Δx или Δy — это изменение выходной величины y, когда входная величина x изменяется на Δx
- Выходной сигнал — диапазон рабочих частот
- Статическая ошибка преобразования или сигнала
Типы LVDT
LD400: Миниатюрные преобразователи смещения постоянного тока с ацеталевыми подшипниками Датчики LVDT — определяют, нужно ли вам измерять относительный ток: C-in, AC-out, DC-in, DC-out; или измерение резонансных частот катушек в зависимости от положения катушек, устройства на основе частоты.Невыпадающая арматура: Эти механизмы лучше подходят для работы на больших расстояниях. Невыпадающие якоря помогают предотвратить перекос, поскольку они направляются и удерживаются узлами с низким коэффициентом трения.
Неуправляемые якоря: Бесконечное качество разрешения, механизм LVDT с неуправляемым якорем не подвержен износу и не ограничивает разрешающую способность измеренных данных. Этот тип механизма прикрепляется к измеряемому образцу, свободно вставляется в трубку, поэтому корпус линейного преобразователя должен поддерживаться отдельно.
Якоря с принудительным выдвижением: Используйте внутренние пружинные механизмы, пневматическое усилие или электродвигатели, чтобы постоянно толкать якорь до максимально возможного полного выдвижения. Якоря с принудительным удлинением используются в LVDT для малоподвижных приложений. Эти механизмы не требуют соединения между образцом и якорем.
Линейные преобразователи переменного смещения обычно используются в современных обрабатывающих инструментах, авионике, робототехнике, а также в компьютеризованном управлении движением и автоматизации производства.Выбор применимого типа LVDT можно рассмотреть, используя следующие спецификации:
Линейность LVDT: Максимальное отклонение от прямой зависимости между измеренным расстоянием и выходным расстоянием в диапазоне измерения.
> 0,025 ±% полной шкалы
0,025 — 0,20 ±% полной шкалы
0,20 — 0,50 ±% полной шкалы
0,50 — 0,90 ±% полной шкалы
0,90 — ±% полной шкалы и более
Рабочие температуры: > — 32ºF, от -32 до 32ºF, от 32 до 175ºF, от 175 до 257ºF, 257ºF и выше.Диапазон температур, в котором устройство должно точно работать.
Диапазоны измерения: 0,02 дюйма, 0,02–0,32 дюйма, 0,32–4,0 дюйма, 4,0–20,0 дюйма, ± 20,0 дюйма (диапазон измерения или максимальное измеренное расстояние)
Точность LVDT: Описывает процент отклонения от фактическое / реальное значение данных измерений.
Выход: Напряжение, ток или частота
Интерфейс: Последовательный — стандартный протокол цифрового вывода (последовательный), такой как RS232, или параллельный — стандартный протокол цифрового вывода (параллельный), такой как IEEE488 .
Тип LVDT: Баланс тока AC / AC или DC / DC, или на основе частоты
LD320: датчики смещения LVDT переменного тока высокой точностиСмещение:
Преобразователь линейного смещения — это электрический преобразователь, используемый для измерения линейного положения. Линейное смещение — это движение объекта в одном направлении вдоль одной оси. Измерение смещения указывает направление движения. Выходной сигнал датчика линейного смещения — это измерение пройденного объектом расстояния в миллиметрах (мм) или дюймах (дюймах).Прецизионные преобразователи смещения LVDT устанавливаются на большинстве современных производственных линий для автоматического измерения при сортировке, применениях, требующих постоянного использования, и при проведении операций по контролю качества. Конструкция валов из закаленной стали, уплотнительных колец и титановых толкателей оптимизирует прецизионную работу в большинстве промышленных условий. Использование гибридных IC-модулей обеспечивает линейный выходной сигнал мВ / В / мм или мВ / В / дюйм для взаимодействия со стандартными измерителями входа постоянного тока, промышленными контроллерами, записывающими устройствами и интерфейсами передачи данных.Датчики
LVDT спроектированы и предназначены для использования во многих отраслях:
LD500: Прецизионные измерительные преобразователи постоянного тока LVDT для контроля качества или автоматизации- Общего назначения
- Аэрокосмическая промышленность
- Промывочная диафрагма
- Heavy Duty / Industrial
- Опасная зона
- Монтаж на печатной плате
- Высокая точность
- Погружной
- Санитарная
- Специально для специальных целей
Эта дифференциальная конструкция дает LVDT значительное преимущество перед устройствами потенциометрического типа, поскольку разрешение не ограничивается расстоянием между обмотками катушки. В линейном преобразователе любое движение сердечника вызывает пропорциональное изменение выходного сигнала. Таким образом, LVDT имеет теоретически бесконечное разрешение: на практике разрешение ограничено только внешней выходной электроникой и физическими подвесками.
Поскольку это трансформатор, LVDT требует управляющего сигнала переменного тока. Специальный блок электроники или формирователь сигнала обычно используется для генерации этого управляющего сигнала, а также для преобразования аналогового выхода переменного тока устройства в + 5 В постоянного тока, 4–20 мА или в какой-либо другой формат, совместимый с оборудованием, расположенным ниже по потоку. Эта схема может быть внешней или может быть размещена внутри корпуса преобразователя. Внутренняя электроника позволяет пользователю подавать на преобразователь сигнал постоянного тока умеренного качества, что часто является преимуществом в приложениях с батарейным питанием и бортовых транспортных средствах.Однако внешняя электроника предлагает более высокое качество и может предоставлять дополнительные функции, такие как калибровка, чтобы обеспечить прямое считывание в технических единицах.
Как работает LVDT?
Принцип вращающегося переменного дифференциального трансформатора Преобразователь линейных перемещений — это, по сути, миниатюрный трансформатор, имеющий одну первичную обмотку, две симметрично намотанные вторичные катушки и сердечник якоря, который может свободно перемещаться вдоль своей линейной оси в направляющих точных подшипников.Шток толкателя соединяет контролируемый компонент с сердечником якоря, так что смещение этого компонента перемещает сердечник не по центру.Типичный датчик LVDT имеет три соленоидные катушки, выровненные встык, окружающие трубку. Первичная обмотка находится в центре, а вторичные обмотки — сверху и снизу. Объект измерения положения прикреплен к цилиндрическому ферроматическому сердечнику и скользит по оси трубки. Переменный ток приводит в действие первичную катушку, вызывая напряжение, индуцируемое в двух вторичных катушках, пропорциональное длине соединительного сердечника.Диапазон частот обычно составляет от 1 до 10 кГц.
Движение сердечника запускает связь от первичной к обеим вторичным обмоткам, что изменяет наведенные напряжения. Дифференциал верхнего и нижнего вторичного выходного напряжения — это отклонение от калиброванной нулевой фазы. Использование синхронного детектора считывает выходное напряжение со знаком, которое относится к смещению. Линейные преобразователи LVDT могут иметь длину до нескольких дюймов и работать как датчик абсолютного положения, который является повторяемым и воспроизводимым.Другие действия или движения не повлияют на точность измерения. LVDT также отличается высокой надежностью, поскольку скользящий сердечник не касается внутренней части трубки и позволяет датчику находиться в полностью герметичной среде.
LVDT — это устройство переменного тока, что означает, что электроника должна преобразовывать его выходной сигнал в полезный сигнал постоянного тока. В основе обработки сигналов LVDT лежат два гибридных модуля; Осциллятор и демодулятор.
Генератор разработан для обеспечения стабильной синусоидальной волны для возбуждения преобразователя и опорной прямоугольной волны для демодулятора.Демодулятор предназначен для усиления выходного сигнала преобразователя и преобразования его в высокоточное постоянное напряжение, которое прямо пропорционально смещению.
Для работы линейного преобразователя необходимо возбуждать первичную обмотку синусоидальной волной, а выходной сигнал вторичных обмоток состоит из синусоидальной волны с информацией о положении, содержащейся в амплитуде и фазе. Выходной сигнал в центре хода равен нулю, возрастая до максимальной амплитуды на любом конце хода.Выход находится в фазе с первичным приводом на одном конце хода и не в фазе на другом конце.
В высококачественном датчике линейных перемещений соотношение между положением и фазой / амплитудой является линейным. Осциллятор и демодулятор — это то, что упрощает переход между положением и фазой / амплитудой.
Описание автогенератора
Функция осциллятора заключается в обеспечении точного синусоидального напряжения для управления преобразователем, стабильного как по амплитуде, так и по частоте.Он также обеспечивает опорную фазу прямоугольной формы для внутреннего использования и для установки нулей в демодуляторе. Осциллятор работает следующим образом. Синусоидальная волна для возбуждения преобразователя генерируется внутренним высокостабильным генератором моста Вина. Частота генератора устанавливается путем соединения контактов или добавления внешних резисторов. Затем синусоидальная волна проходит через усилитель мощности, чтобы обеспечить ток, достаточный для питания большинства преобразователей (50 мА), без необходимости использования внешних буферов.Усилитель мощности содержит схему защиты, поскольку в среде, где работает большинство преобразователей, вероятно короткое замыкание.Синусоидальная волна выводится на преобразователь и используется внутри для генерации прямоугольной волны для привязки фазы к демодулятору. Выход осциллятора контролируется входом дистанционного считывания, что позволяет сделать поправку на падение напряжения на выводах преобразователя. Этот вход дискретизируется прямоугольной волной и сравнивается с опорным входом в регуляторе амплитуды, чтобы удерживать напряжение генератора на фиксированном уровне.Эталонный вход берется из эталонного выхода или логометрического выхода. позволяет фиксировать напряжение генератора или быть пропорциональным напряжению питания.
Демодуляция и фильтрация сигнала LDVT
Описание демодулятора
Функция демодулятора состоит в том, чтобы принимать выходной сигнал переменного тока преобразователя и преобразовывать его в полезное постоянное напряжение, пропорциональное смещению, нагрузке и т. Д. Он также содержит схему, позволяющую регулировать усиление и ноль для работы с широким диапазоном преобразователей.Демодулятор работает следующим образом. Выходной сигнал преобразователя подается в схему выбора грубого усиления и затем усиливается. Этот усилитель может иметь коэффициент усиления 25 или 250, если используется опция x10, дополнительное усиление позволяет работать с датчиками с малой выходной мощностью, такими как тензодатчики.
Выполнение основного усиления с помощью сигнала переменного тока означает, что дрейф схемы уменьшается. Затем сигнал переменного тока высокого уровня передается на синхронный по фазе демодулятор, который использует прямоугольную волну от генератора для преобразования его в постоянное напряжение с некоторым наложенным переменным током.Затем он проходит через фильтр нижних частот, который удаляет большинство компонентов переменного тока, оставляя постоянное постоянное напряжение с небольшой пульсацией. Фильтр нижних частот включает в себя схему для установки грубого нуля, точного нуля и точного усиления, а также имеет соединения, позволяющие изменять характеристики фильтра.
Инновации и приложения для линейного преобразователя
Серия LD620: высокоточные датчики смещения с выходным напряжением постоянного тока Существуют многочисленные варианты установки.При желании узел катушки можно прикрепить к измеряемой величине, в то время как толкатель прикреплен к фиксированной точке. Могут использоваться различные механические связи, так что движение сердечника может быть больше или меньше движения измеряемой величины.LVDT Rig лучше всего подходит для испытаний на растяжение
При испытании материала на растяжение для определения его модуля упругости необходимо точно знать приложенную нагрузку и расстояние, на которое материал растягивается под этой нагрузкой. Традиционно эти параметры точно измеряются с помощью тензодатчика и датчика смещения LVDT соответственно.В последних случаях экстензометр с датчиком смещения подключается непосредственно к испытуемому образцу.Этот метод имеет два явных недостатка:
- экстензометр должен быть настроен для каждого образца и имеет тенденцию ограничивать доступ к нему.
- , если образец испытан до предела прочности, внезапный удар может повредить датчик.
В этом альтернативном методе измерительный линейный преобразователь крепится к зажиму для фиксации образца, который перемещается при растяжении материала. Когда измерительная головка измерительного преобразователя перемещается вверх по наклонной поверхности клина, вертикальное движение передается пропорциональному горизонтальному движению сердечника преобразователя. Выходной сигнал линейного напряжения с преобразователя подается на цифровой вольтметр или подобное измерительное устройство, которое может быть откалибровано с учетом угла наклона поверхности, чтобы обеспечить прямое и точное измерение удлинения материала под нагрузкой.
LVDT в приложении для испытания на растяжение Поскольку прецизионный шариковый наконечник измерительного преобразователя свободно перемещается по гладкой обработанной поверхности наклона, а вал преобразователя вращается в прецизионных подшипниках, боковые напряжения вала преобразователя отсутствуют. Это дополнительно обеспечивается за счет использования очень малого угла наклона относительно направления движения, что также позволяет использовать датчик малого хода; горизонтальное перемещение сердечника преобразователя может быть в 10 раз меньше пройденного вертикального расстояния.
Измерительные преобразователиимеют высокоточные линейные выходные сигналы даже для малых ходов, поэтому калиброванное измерение удлинения испытуемого образца также является очень точным. Для очень малых удлинений, например менее 1 мм при высоких приложенных нагрузках, экстензометр с датчиком линейных перемещений будет немного более точным. Однако измерительный преобразователь предпочтительнее для большинства применений и особенно подходит при испытании таких материалов, как мягкие металлы, пластмассы и резина, которые значительно растягиваются без разрушения.
Поскольку измерительный преобразователь прикреплен к боковой стороне зажима, он не препятствует доступу к исследуемому образцу. Кроме того, его не нужно настраивать каждый раз, когда новый образец помещается в испытательную машину. Если образец разбивается, наконечник датчика просто быстрее перемещается по склону без риска повреждения. Общий дизайн очень компактный.
Формы преобразователей с изменением толщины материала
Измерительные преобразователи обычно используются в промышленности для проверки того, что толщина изготовленного листового материала, такого как бумага или металл, остается в пределах указанных допусков.Если профиль измеряемой величины включает несколько различных толщин, например, сложная экструзия, может быть разработана измерительная установка, включающая ряд линейных преобразователей для контроля различных размеров. В еще одном варианте этой идеи измерительные преобразователи типа LVDT были встроены в установку, предназначенную для измерения различной толщины натурального производственного материала — обработанных шкур животных. Эти измерения профиля затем используются для построения изображения всей кожи, чтобы можно было вырезать из нее участки одинаковой толщины и использовать их с максимальной пользой; Самая тонкая кожа выбирается, возможно, для перчаток, несколько более толстые — для сумок и так далее.Датчик толщины кожи животного Как и в случае листовых материалов одинаковой толщины, обшивка пропускается для измерения толщины в основном между двумя роликами, которые могут свободно вращаться вокруг своих осей. Нижний ролик закреплен в вертикальной плоскости, чтобы служить точкой отсчета для измерения. Другой может двигаться вертикально, чтобы следовать за верхней поверхностью материала, расстояние, на которое он удаляется от исходной точки (то есть толщина материала), измеряется измерительными преобразователями. Однако, чтобы приспособиться к различной толщине обшивки, верхний валик разделен в данном случае по своей ширине на шестнадцать отдельных секций.
Каждая секция подпружинена против общего опорного шпинделя, который установлен на фиксированном расстоянии над опорным роликом. По мере того, как обшивка проходит между роликами, секции верхнего ролика удерживаются в положительном контакте с поверхностью материала с помощью пружин, но при этом они могут перемещаться вверх и вниз при изменении толщины обшивки. Отдельный измерительный преобразователь LVDT предназначен для каждой секции ролика и отслеживает изменение толщины кожи в этой точке. Во избежание бокового деформации чувствительной головки датчика, которое может быть вызвано прямым контактом с вращающимся роликом, вертикальное смещение механически передается датчику с помощью поворотной плоской планки, которая опирается своим свободным концом на верх ролика ( см. схему вида сбоку).
Выходной сигнал напряжения преобразователя калибруется на измерительном устройстве с учетом того факта, что расстояние, перемещаемое головкой преобразователя при таком расположении, немного отличается от фактического вертикального перемещения секции ролика. Высота шпинделя опоры верхнего ролика устанавливается в соответствии со средней толщиной обшивки. Количество и ширина роликовых секций были рассчитаны таким образом, чтобы соответствовать ожиданиям самого широкого пользователя. Когда кожа проходит между роликами, записанные измерения дают точное представление о различной толщине кожи вдоль линии каждого датчика.
«Контурная карта» всей кожи, показывающая области разной толщины, создается путем обработки выходных сигналов линейного датчика в компьютере и представления полученных данных. Цветовые коды или монохромные тона могут использоваться для прояснения областей разной толщины, так же как разная высота земли обозначена на карте нормалей.
Любой участок кожи необходимой толщины может быть легко идентифицирован для изготовления конкретных изделий, что облегчает позиционирование рисунков и оптимизирует использование материала с минимальными потерями.
Использование датчиков линейных перемещений для измерения давления и нагрузки
Измерение нагрузки с помощью датчика положения При использовании в сочетании с подходящим чувствительным к усилию устройством, таким как металлическая диафрагма или контрольное кольцо, преобразователи линейных перемещений могут обеспечить высокоточные и стабильные, но относительно недорогие средства измерения давления и нагрузки.Одним из применений мембранной системы является измерение давления внутри защитной оболочки, например давления в блоке цилиндров двигателя во время разработки и испытаний.Датчик смещения, установленный внутри контрольного кольца, может иметь преимущества перед тензодатчиком при измерении очень малых нагрузок или при наличии возможности ударной нагрузки. Обычно извилистая металлическая диафрагма встроена в стенку резервуара под давлением и отклоняется под давлением. Толщина и чувствительность диафрагмы рассчитаны на диапазон давления.
Линейный преобразователь LVDT установлен под прямым углом к диафрагме, а его удлинительный стержень сердечника прикреплен к центру диска.Доступны линейные преобразователи для рабочих температур до 600 ° C.
В качестве альтернативы для высоких температур можно использовать датчик приближения, который не контактирует с диафрагмой. Любое изгибание диафрагмы отражается сигналом выходного напряжения преобразователей. Простой микрочип можно использовать для калибровки, просто создав одно известное высокое давление и одно низкое давление, поскольку движение диска линейно с давлением в центре. В результате получается недорогой и простой датчик давления с высокой повторяемостью и надежностью.
Измерение давления датчиком положения Включение датчика линейных перемещений в контрольное кольцо дает системе измерения нагрузки значительные преимущества перед тензодатчиком в некоторых приложениях. Работая с очень небольшим фактическим движением, тензодатчики имеют тенденцию быть жесткими и нечувствительными к очень небольшим нагрузкам. Контрольное кольцо, с другой стороны, представляет собой сравнительно гибкую балку, способную более свободно перемещаться под нагрузкой — только условно, потому что пройденное расстояние должно быть меньше, чем общий ход e.г., ± 0,5 мм от линейного преобразователя. Поэтому эта система более чувствительна к легким нагрузкам.
Хотя контрольное кольцо изгибается, на самом деле оно более прочное и эластичное, чем тензодатчик. Жесткость тензодатчика имеет преимущество при быстром приложении и снятии нагрузки, поскольку жесткая система дает высокочастотный отклик. Однако, если тензодатчик ºº подвергается сильной ударной нагрузке, он может легко перегрузиться. С другой стороны, защитное кольцо может двигаться дальше, чтобы поглотить ударную нагрузку без вредного воздействия.
Использование датчика LVDT для подсчета
Высокоскоростной подсчет банкнот или аналогичных листов, требующих абсолютной числовой точности, может быть достигнут с помощью простого принципа конструкции, основанного на линейных преобразователях. Выходной сигнал напряжения от этих высокочувствительных датчиков LVDT можно использовать для: индивидуального подсчета банкнот на высокой скорости; обнаруживать, когда две или более банкноты считаются вместе; выявить проклеенный ремонт; указать, когда записка стала перевернутой; и предупредить оператора об отсутствии части примечания.В типичной конструкции машины банкноты подаются между двумя вращающимися роликами, один из которых движется в неподвижных подшипниках, а другой может двигаться линейно, чтобы изменять зазор между ними. Последний ролик удерживается в положительном контакте с банкнотой при соответствующей загрузке. На каждом конце этого подвижного ролика установлен миниатюрный линейный преобразователь для измерения его линейного смещения при прохождении банкнот через зазор.
Следовательно, когда одна банкнота проходит между роликами, сердечники LVDT смещаются на величину, равную толщине банкноты, и это создает выходные сигналы напряжения соответствующей интенсивности для обоих преобразователей.Сигнал поддерживается только тогда, когда банкнота проходит между роликами, и, таким образом, вырабатывается импульсный выходной сигнал, который можно использовать для электронного счета. Две ноты, проходящие вместе, удваивают интенсивность устойчивого сигнала и т. Д.
Другие приложения
Power Turbines: В турбинах электростанций по всему миру используются линейные переменные дифференциальные преобразователи в качестве датчиков положения с преобразователями сигналов для обеспечения необходимой рабочей мощности.Напряжения и частоты переменного тока, необходимые для индуктивных датчиков положения или датчиков положения LVDT, недоступны из источников питания.Гидравлика: Датчики линейного положения служат датчиками заряда в гидроаккумуляторах, специальными внешними датчиками в суровых условиях с высокой устойчивостью к вибрации и ударам и включают все длины хода в пределах возможностей наших датчиков. Если вам требуется больший ход, позвоните нашим профессиональным инженерным специалистам в OMEGA для получения информации по индивидуальному дизайну.
Автоматизация: приложения автоматизации LVDT используют герметичные датчики измерения размеров для работы за пределами ваших лабораторий НИОКР, производственных цехов и в суровых условиях окружающей среды при автоматизации производства, средах управления технологическими процессами, измерениях МДП и промышленных измерениях. .
Самолет: В большинстве аэрокосмических / авиационных приложений используются миниатюрные или субминиатюрные датчики положения. Они представляют собой управляемые тросом механизмы определения смещения.OMEGA может разрабатывать прецизионные продукты для применения в коммерческих самолетах, космосе, авиации и экологических системах для космической среды обитания. Изделия устанавливаются в фиксированном положении, трос смещения прикрепляется к движущемуся объекту, например, шасси или элерону. Кабель втягивается и извлекается при движении. В зависимости от формирования сигнала и системы крепления электрический выход будет отображать различные скорости, углы, длину и движения.
Спутники: Рассмотрите возможность применения в спутниковых технологиях и смежных областях, помимо производства спутников, датчики положения необходимы для космических аппаратов, грузовых самолетов, военных истребителей, дронов, экспериментальных самолетов, ракет, ядерных реакторов, имитаторов полета и т. Д. высокоскоростные железные дороги.
Движение с постоянной скоростью , также известное как равномерное прямолинейное движение (urm) , это движение с постоянной скоростью , т. Е. Траектория является прямой, а скорость равна постоянный. В этом разделе мы собираемся объяснить:
Определение движения с постоянной скоростью
Хотя обнаружение прямолинейного равномерного движения или движения с постоянной скоростью в природе встречается довольно редко, его легче всего изучать, и оно будет полезно при изучении других, более сложных движений.Равномерное прямолинейное движение имеет следующие свойства:
- Ускорение равно нулю ( a = 0 ), потому что ни величина, ни направление не меняются
- С другой стороны, начальная, средняя и мгновенная скорости всегда имеют одинаковые значения
Тело имеет движение с постоянной скоростью или равномерное прямолинейное движение , когда его траектория является прямой линией , а его скорость постоянна .Это означает, что он преодолевает равные расстояния за равное время .
Уравнения движения с постоянной скоростью
Прямолинейное и равномерное движение
Равное время тратится на путешествие на равные расстояния. Средняя скорость постоянна и равна величине скорости.
Уравнения движения с постоянной скоростью :
Где:
- x , x 0 : Позиция тела в данный момент времени ( x ) и в начальный момент времени ( x 0 ).Единицей измерения в Международной системе (S.I.) является метр (м) .
- v , v 0 : Скорость тела в данный момент времени ( v ) и в начальный момент времени ( v 0 ). Его единица измерения в Международной системе (S.I.) — метр в секунду (м / с) .
- a : Ускорение кузова. Единицей измерения в Международной системе (S.I.) является метр на секунду в квадрате (м / с 2 )
Для вывода уравнений равномерного прямолинейного движения u.среднеквадратичное значение следует учитывать, что:
- Средняя скорость совпадает с мгновенной скоростью
- Нет разгона
С этими ограничениями получаем:
vavg = vvavg = ΔxΔt = x-x0t-t0 = ⏟t0 = 0x-x0t → x-x0 = v⋅t → x = x0 + v⋅t
Пример
Два мраморных игрока смотрят друг на друга со своими шариками в руках. Игра состоит из одновременного бросания шариков по прямой линии так, чтобы они ударялись друг о друга.Игроки расположены в 36 метрах друг от друга, и игрок A запускает шарик со скоростью 2 м / с, а игрок B — со скоростью 4 м / с, в равномерном прямолинейном движении. Вычислите расстояние от игрока B, на котором шарики столкнутся.
.